第6章大林算法.ppt
《第6章大林算法.ppt》由会员分享,可在线阅读,更多相关《第6章大林算法.ppt(23页珍藏版)》请在冰豆网上搜索。
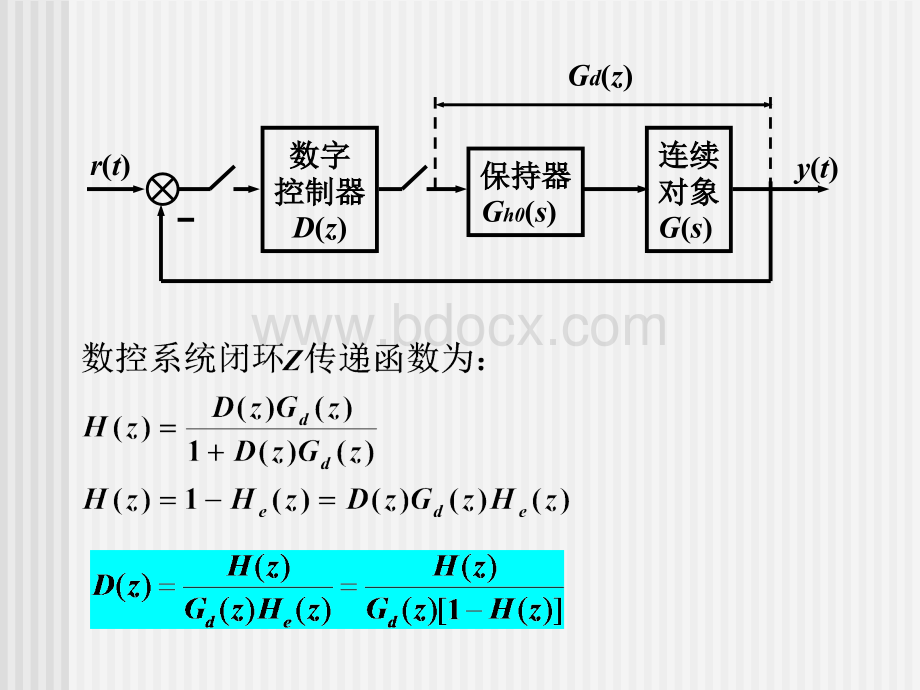
数字数字控制器控制器D(z)保持器保持器Gh0(s)连续连续对象对象G(s)r(t)y(t)Gd(z)有限拍控制系统设计有限拍控制系统设计系统在系统在典型信号作用典型信号作用下,经过有限拍(即有限个采样周期下,经过有限拍(即有限个采样周期T),使其输出的稳态误差为零。
),使其输出的稳态误差为零。
对对H(z)、He(z)的约束的约束:
快速性、准确性、稳定性、物理可实现性快速性、准确性、稳定性、物理可实现性设设单位圆上或单位圆外的极点零点为:
单位圆上或单位圆外的极点零点为:
有限拍无波纹系统设计有限拍无波纹系统设计H(z)应包含应包含Gd(z)的所有零点,其余同的所有零点,其余同有限拍系统设计。
有限拍系统设计。
6.5对象具有时延的控制系统设计对象具有时延的控制系统设计本节针对具有时延的连续对象,设计两种本节针对具有时延的连续对象,设计两种D(z):
史密斯预报器(史密斯预报器(Smithpredictor)和大林算法)和大林算法(Dahlinalgorithm)。
6.5.1史密斯预报器史密斯预报器6.5.2大林算法大林算法带零阶保持器的一阶对象带零阶保持器的一阶对象zz传递函数传递函数系统闭环传递函数系统闭环传递函数大林算法的数字控制器大林算法的数字控制器对于二阶系统对于二阶系统振铃及其抑制振铃及其抑制说明:
说明:
nD(z)D(z)修改后,会影响修改后,会影响H(z)H(z),要检验;,要检验;nGd(z)Gd(z)含单位圆外零点时,含单位圆外零点时,D(z)D(z)不稳定,解决办不稳定,解决办法与消除振铃一样,使法与消除振铃一样,使z=1z=1;n大林算法只适用于对象稳定情况大林算法只适用于对象稳定情况n振铃有主次之分,一般应消除主要的。
振铃有主次之分,一般应消除主要的。
6.6直接设计法直接设计法设计准则:
设计准则:
1.构造闭环构造闭环H(z),分子分母阶次差与,分子分母阶次差与Gd(z)相同。
相同。
2.H(z)包含包含Gd(z)单位圆附近及圆外零点,单位圆附近及圆外零点,H(z)的极点可按相应连续系统的闭环极点转换而配的极点可按相应连续系统的闭环极点转换而配置。
置。
3.H(z)应满足对系统稳态误差的要求。
应满足对系统稳态误差的要求。
6.7w变换法变换法n求广义对象求广义对象Gd(z)nw变换变换n令令w=jv,得到得到Gd(jw),在,在w平面画幅频、平面画幅频、相频特性相频特性n设计设计D(w)nD(w)-D(z)6.8小结小结配置所希望的系统动特性极点:
配置所希望的系统动特性极点:
也即希望也即希望H(z)具有接近连续系统相对阻尼比具有接近连续系统相对阻尼比,自然频率,自然频率为为0的动特性,的动特性,T越小,二者越接近越小,二者越接近。
系统的系统的Z域设计,是在已知对象特性域设计,是在已知对象特性G(s)情况下,先构造情况下,先构造希望的闭环特性希望的闭环特性H(z),再设计数字控制器,再设计数字控制器D(z)的过程。
的过程。
1.构造构造H(z)确定其增益、零点与极点的过程,受对象特确定其增益、零点与极点的过程,受对象特性性Gd(z)、及控制器、及控制器D(z)可实现等因素的制约。
可实现等因素的制约。
(1)Gd(z)与与T有关,有关,z=0的极点数与的极点数与G(s)的时延和的时延和T有关;有关;
(2)H(z)的极点应包含两部分:
的极点应包含两部分:
包含包含Gd(z)中中z=0的所有极点(代表对象时延),否则的所有极点(代表对象时延),否则D(z)物理上不可实现;物理上不可实现;思考与练习思考与练习
 升级会员
升级会员 