现代控制理论实验matlab 报告Word文档格式.docx
《现代控制理论实验matlab 报告Word文档格式.docx》由会员分享,可在线阅读,更多相关《现代控制理论实验matlab 报告Word文档格式.docx(11页珍藏版)》请在冰豆网上搜索。
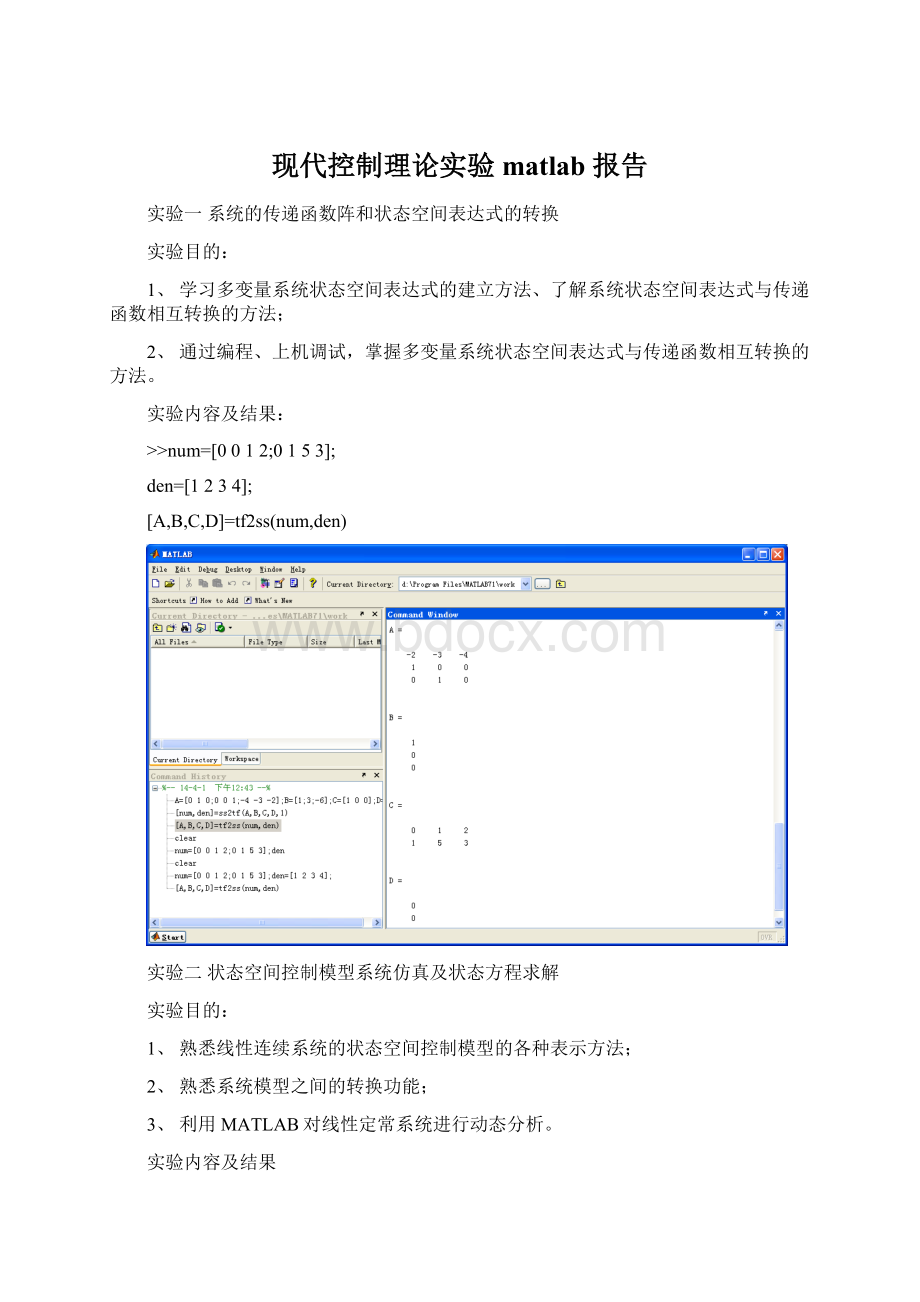
num=[1213];
den=[10.521];
sys=tf(num,den);
sys1=tf2zp(num,den);
sys2=tf2ss(num,den);
impulse(sys);
step(num,den,t);
(2)
A=[01;
-10-5];
B=[0;
0];
D=B;
C=[10;
01];
x0=[2;
1];
[y,x,t]=initial(A,B,C,D,x0);
plot(t,x(:
1),t,x(:
2))
grid
title('
Responsetoinitialcondition'
)
xlabel('
Time(sec)'
ylabel('
x1,x2'
text(0.55,1.15,'
x1'
text(0.4,-2.9,'
x2'
(3)
A=[-1-1;
6.50];
B=[11;
10];
D=[00;
00];
step(A,B,C,D)
(4)思考
A=[0-2;
1-3];
B=[2;
C=[10];
x0=[1;
U=1;
[t,x]=ode45(@solve_state_fun,[010],x0,[],A,B,U);
2));
实验三系统能控性、能观性的判别
实验目的:
1、系统的能控性和能观测性的判别方法、系统的能控性和能观测性的分解;
2、了解MATLAB中的相应的函数。
(1)判别系统的能观性
A=[00-1;
10-3;
01-3];
B=[1;
1;
C=[01-2];
Qo=obsv(A,C);
n=rank(Qo);
L=length(A);
ifn==L
str='
系统状态完全能观'
else
系统状态不完全能观'
end
str=
系统状态不完全能观
(2)求系统的能观性分解后的模型
A=[00-1;
[D,E,F,T,K]=obsvf(A,B,C)
D=
-1.0000-1.3416-3.8341
0.0000-0.4000-0.7348
-0.00000.4899-1.6000
E=
1.2247
-0.5477
-0.4472
F=
-0.00000.0000-2.2361
T=
0.40820.81650.4082
-0.91290.36510.1826
0-0.44720.8944
K=
110
sum(K)
ans=
2
实验四系统稳定性仿真实验
1、掌握线性系统稳定性的判别方法
2、了解MATLAB中相应的函数
(1)判定如下系统的李亚普诺夫稳定性
A=[01;
-1-1];
Q=eye(size(A,1));
P=lyap(A,Q);
P_eig=eig(P);
ifmin(P_eig)>
disp('
ThesystemisLypunovstable.'
ThesystemisnotLypunovstable.'
ThesystemisLypunovstable.
(2)判定如下系统的李亚普诺夫稳定性
A=[-3-8-2-4;
1000;
0100;
0010];
B=[1000]'
;
C=[0011];
D=0;
disp('
ThesystemisLypunovstable'
);
ThesystemisnotLypunovstable'
ThesystemisLypunovstable
实验五状态反馈及状态观测器的设计
1、熟悉状态反馈矩阵的求法
2、熟悉状态观测器的设计方法
A=[-10-35-50-24;
C=[172424];
Pole=[-30,-1.2,-2.4+4i,-2.4-4i];
a_s_coefficient=poly(A);
a_d_coefficient=poly(Pole);
k_coefficient=a_d_coefficient-a_s_coefficient;
k_coefficient=fliplr(k_coefficient);
k_coefficient=k_coefficient(1,1:
length(k_coefficient)-1)
k_coefficient=
759.3600801.7120172.520026.0000
Qc=ctrb(A,B);
Q=fliplr(Qc);
counter=-1;
n=length(A);
X=zeros(n,n);
whilecounter>
=-n+1
x=diag(linspace(a_s_coefficient(-counter+1),a_s_coefficient(-counter+1),counter+n),counter);
X=X+x;
counter=counter-1;
X=X+eye(n);
P=eye(n)/(Q*X);
k=k_coefficient*P;
A=A-B*k;
[num,den]=ss2tf(A,B,C,D,1);
[p,z]=pzmap(sys);
pzmap(sys);
step(A,B,C,D);
零极点图:
阶跃响应曲线:
 升级会员
升级会员 