双容水箱液位流量串级控制系统设计Word格式文档下载.docx
《双容水箱液位流量串级控制系统设计Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《双容水箱液位流量串级控制系统设计Word格式文档下载.docx(13页珍藏版)》请在冰豆网上搜索。
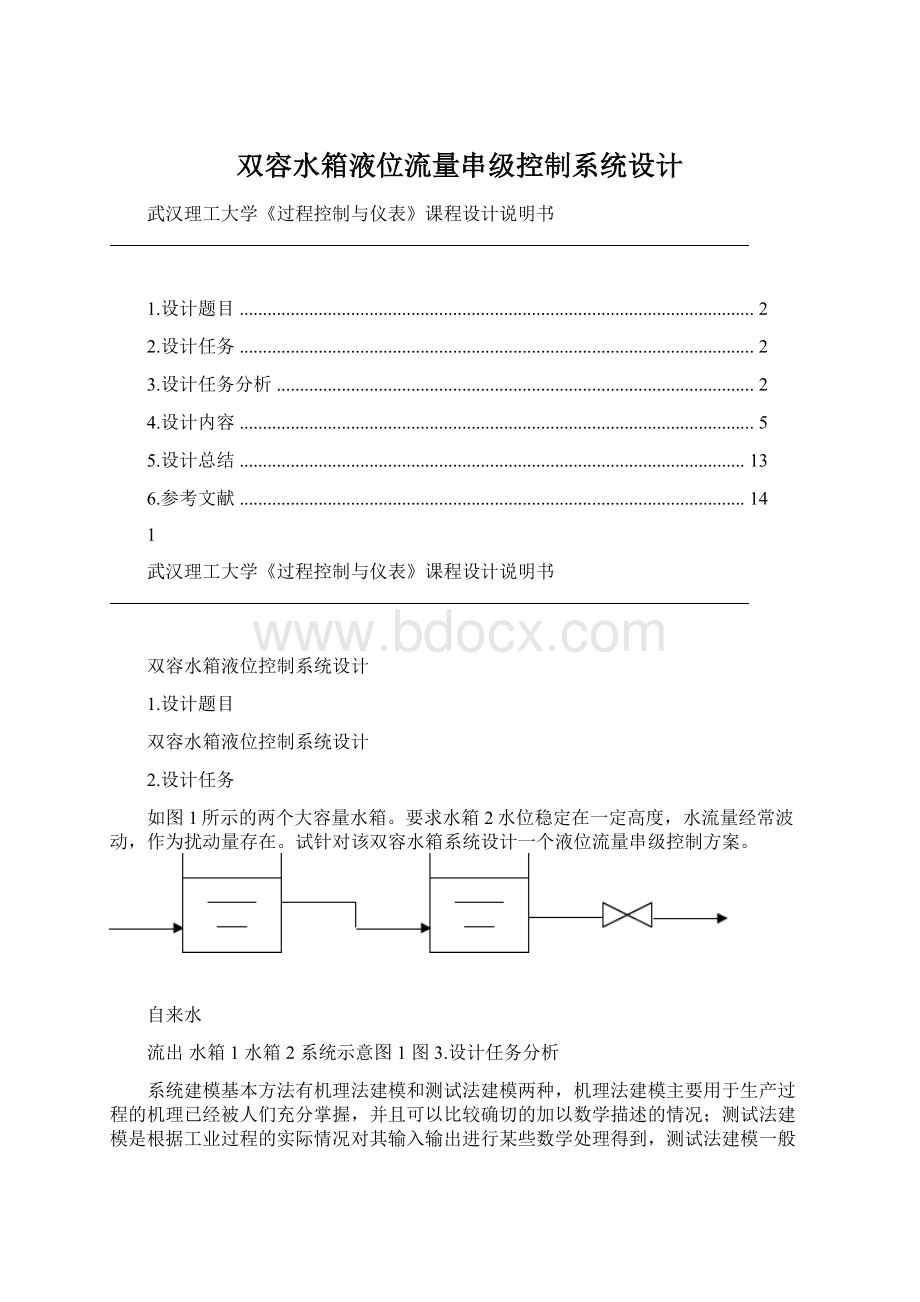
自来水
流出水箱1水箱2系统示意图1图3.设计任务分析
系统建模基本方法有机理法建模和测试法建模两种,机理法建模主要用于生产过程的机理已经被人们充分掌握,并且可以比较确切的加以数学描述的情况;
测试法建模是根据工业过程的实际情况对其输入输出进行某些数学处理得到,测试法建模一般较机理法建模简单,特别是在一些高阶的工业生产对象。
对于本设计而言,由于双容水箱的数学模型已知,故采用机理法建模。
在该液位控制系统中,建模参数如下:
控制量:
水流量Q;
被控量:
下水箱液位;
主被控对象(水箱2水位)传递函数W1=1/(100s+1),
副被控对象(流量)传递函数W2=1/(10s+1)。
检测对象特性:
Gm1(S)=1/(0.1S+1)(液位传感器);
2
Gm2(S)=1/(0.1S+1)(流量传感器)。
控制器:
PID;
执行器:
控制阀;
干扰信号:
在系统单位阶跃给定下运行10s后,施加均值为0、方差为0.01的白噪声。
为保持水箱2液位的稳定,设计中采用闭环系统,将水箱2液位信号经水位检测器送至控制器(PID),控制器将实际水位与设定值相比较,产生输出信号作用于执行器(控制阀),从而改变流量调节水位。
当对象是单水箱时,通过不断调整PID参数,单闭环控制系统理论上可以达到比较好的效果,系统也将有较好的抗干扰能力。
该设计对象属于双水箱系统,整个对象控制通道相对较长,如果采用单闭环控制系统,当水箱2有干扰时,此干扰经过控制通路传递到水箱2,会有很大的延迟,进而是控制器响应滞后,影响控制效果,在实际生产中,如果干扰频繁出现,无论如何调整PID参数,都将无法得到满意的效果。
考虑到串级控制可以使某些主要干扰提前被发现,及早控制,在内环引入负反馈,检测水箱1流量,将流量信号传至副控制器,然后直接作用于控制阀,以此得到较好的控制效果。
设计中,首先进行单回路闭环系统的建模,系统框图如下:
单回路闭环系统框图2图双容水箱单闭环实施方案图如下图:
3
3双容水箱单闭环实施方案图图、参数,整定好参数后,分别改变P在无干扰情况下,整定主控制器的PID,比参数,观察各参数的变化对系统性能的影响;
然后加入干扰(白噪声)I、D较有无干扰两种情况下系统稳定性的变化。
然后,加入副回路、副控制器,在有无干扰的情况下,比较单回路控制、串级控制系统性能的变化,串级控制系统框图如下:
图4双闭环系统框图双容水箱液位流量串级系统实施方案图如图:
4
4图双闭环系统实施框图
4.设计内容PID控制的设计1)单回路仿真框图如下(无干扰):
MATLAB10:
1.
参数整定,这里采用衰减曲线法,衰减比为先对控制对象进行PID
单回路PID控制图5
微分时间常数,中I参数为0调为最大值,a()将积分时间Ti即MATLAB为较小值。
中,比例带0δ为较大值,即MATLABK调为Td待系统稳定后,做阶跃响应,系统衰减比为10:
1(b)时,阶跃响应如下图:
5
阶跃响应图6系统衰减10:
1图K=40
,,周期Ts=34s经观测,此时衰减比近似10:
1;
50取参数:
K1=40*5/4=50,PIDc()根据衰减曲线法整定计算公式,得到Td=0.4Ts=27.2s
)I=1/Ti=0.01,(注:
Ti=1.2Ts=68sMATLAB中整定参数得到阶跃响应曲线如下:
PID使用以上
整定参数图图7PID观察以上曲线可以初步看出,经参数整定后,系统的性能有了很大的改善。
6
现用控制变量法,分别改变P、I、D参数,观察系统性能的变化,研究各调节器的作用。
(a)保持I、D参数为定值,改变P参数,阶跃响应曲线如下:
P
控制变量法改变图8
的增大,最大动态偏参数值下系统阶跃响应曲线可知,随着K比较不同P差增大,余差减小,衰减率减小,振荡频率增大。
参数,阶跃响应曲线如下:
参数为定值,改变IDb()保持P、
D图9控制变量法改变调节则无余差,而且随着I参数值下系统阶跃响应曲线可知,有比较不同ITi的减小,最大动态偏差增大,衰减率减小,振荡频率增大。
7
(c)保持P、I参数为定值,改变D参数,阶跃响应曲线如下:
比较不同D参数值下系统阶跃响应曲线可知,随着D参数的增大,最大动态偏差减小,衰减率增大,震荡频率增大。
现向控制系统中加入干扰,以检测系统的抗干扰能力,系统的仿真框图如下:
10加入干扰后仿真图图阶跃响应曲线如下:
11干扰时阶跃响应图图
8
观察以上曲线,并与无干扰时的系统框图比较可知,系统稳定性下降较大,在干扰作用时,很难稳定下来,出现了长时间的小幅震荡,由此可见,单回路控制系统,在有干扰的情况下,很难保持系统的稳定性能,考虑串级控制。
2)串级控制系统的设计
主控制器的选择:
主被控变量(液位)是工艺操作的主要指标,允许波动的范围很小,一般要求无余差,所以主控制器应选用PI控制规律
副被控变量的设置是为了保证主被控变量的控制质量,提高系统的反应速度,提高控制质量,可以允许在一定范围内变化,允许有一定的余差,因此副控制器可以采用P控制规律,因为主要为了提高响应速度。
在工程实践中,串及控制系统常用的整定的方法有以下三种:
逐步逼近法,两步整定法,一步整定法。
本设计采用一步整定法
一步整定法就是根据经验先确定副控制器的参数,然后将副回路作为主回路的一个环节,按单回路反馈控制系统的整定方法整定主调节器的参数,具体的方法是:
(1)在工况稳定,系统纯为比例作用的情况下,根据K02/δ2=0.5这一关系式,通过副过程放大系数K02,求取副调节器的比例放大系数δ2或按经验选取,并将其设置在副回路调节器上。
(2)按照单回路控制系统的任一种参数整定方法来整定主调节器的参数,
(3)改变给定值,观察被控量的相应曲线,根据主调节器的放大系数K1和副调节器放大系数K2匹配原理,适当调整调节器的参数,使主参数品质最佳。
(4)如果出现较大的振荡现象,只要加大主调节器的比例度δ或增大积分时间常数T1,就可得到改善
对于该温度串级控制系统,在一定范围内,主、副控制器的增益可以相互匹配,根据下表,可以大致确定副控制器比例带和增益Kc2。
副控制器对象
温度
压力
流量
液位
比例带
20~60
30~70
40~80
20~80
Kc2
增益
1.7~5.0
1.4~3.0
1.25~2.5
1.25~5.0
根据题目要求先选择Kc2=3.5然后在副回路已经闭合的情况下按单回路控制器参数整定方法整定主控制器,本方案采用10:
1衰减曲线法整定,衰减曲线9
武汉理工大学《过程控制与仪表》课程设计说明书然后把比例度由大逐渐减小,法是在闭环系统中,先把调节器设置为纯比例作用,这是的比例度为1衰减过程为止,直道10:
加阶跃扰动观察输出响应衰减过程,10:
1衰减比例度用δs表示,相邻两波峰间的距离称为10:
1衰减周期TS,根据δs和TS,再由下表的经验公式,就可计算出调节器的预整定的参数值。
整定参数
衰减率调节
规律δTiTd
Pδs0.75
PI1.2δs0.5Ts
PID
1.8δs0.3Ts0.1Ts
Pδs0.9
PI1.2δs2Ts
1.8δs1.2Ts
0.4Ts
系统的MATLAB仿真框图如下(有噪声):
有噪声时仿真框图图12
当无噪声时,系统的阶跃响应如下图所示:
10
13图无噪声时阶跃响应图减小比较单回路控制系统无干扰阶跃响应可知,串级控制降低了最大偏差,了振荡频率,大大缩短了调节时间。
条件下的系统阶跃响应曲线:
P、I现向系统中加入噪声,观察不同时I=1P=20
图14有噪声时阶跃响应图
11
P=45I=2
15不同参数的阶跃响应图图系统快速性增调节时间都有所缩短,观察以上曲线可知,当副回路控制器,强了,在干扰作用下,系统稳定性更高,提高了系统的抗干扰能力,最大偏差更小。
可以取得令人满意的控制效果。
12
5.设计总结
通过本次设计,学会了系统建模的一般步骤,掌握了分析简单系统特性的一般方法,并对系统中的控制器、执行器、控制对象等各个部分有了更加直观的认识。
基本掌握了简单系统模型的PID参数整定方法,对PID调节器中的P、I、D各个参数的功能、特性有了更加深刻的认识,通过实验验证的方式,很多内容印象非常深刻。
通过仿真验证了串级控制对干扰的强烈抑制能力,仿真过程中也熟悉了控制系统中MATLAB仿真的基本方法,相信对以后的学习会有所帮助。
从设计内容来讲,或许学习的仅仅是过程控制,学习的仅仅是MATLAB的操作,但设计过程中,从设计思想,到研究方法,再到结论总结都培养了自己的学习研究能力,这也许更重要。
再有,之前学习的都是课本知识,只是学习给你一个系统然后怎么分析,而课程设计则是一个综合过程,需要分析系统性能要求,同时也要考虑实际实现过程,在做的过程中我就遇到了疑惑,就是在副回路的取哪的流量构成闭环,不知是在水箱1,2间还是在水箱1之前的管道取流量,为此我问了两个老师,才终于知道了,就算我们分析系统时还有一定的能力,可是动手能力还是比较欠缺的。
现在就快要参加工作了,那就是实干,所以通过本次课程设计,让我对之前学的知识能运用到实际工作中,虽然遇到了问题,但通过老师的帮助还是解决了,这是比较好的学习过程。
13
6.参考文献
[1]方康玲.过程控制系统.武汉:
武汉理工大学出版社.2002年
[2]王再英.过程控制系统与仪表.北京:
机械工业出版社.2006年1月
[3]金以慧.过程控制.北京:
清华大学出版社.1993年
[4]潘立登.过程控制技术原理与应用.北京:
中国电力出版社.2007年
[5]侯志林.过程控制与自动化仪表.北京:
机械工业出版社.1999年
14
 升级会员
升级会员 