Controllogix 培训1Word格式.docx
《Controllogix 培训1Word格式.docx》由会员分享,可在线阅读,更多相关《Controllogix 培训1Word格式.docx(27页珍藏版)》请在冰豆网上搜索。
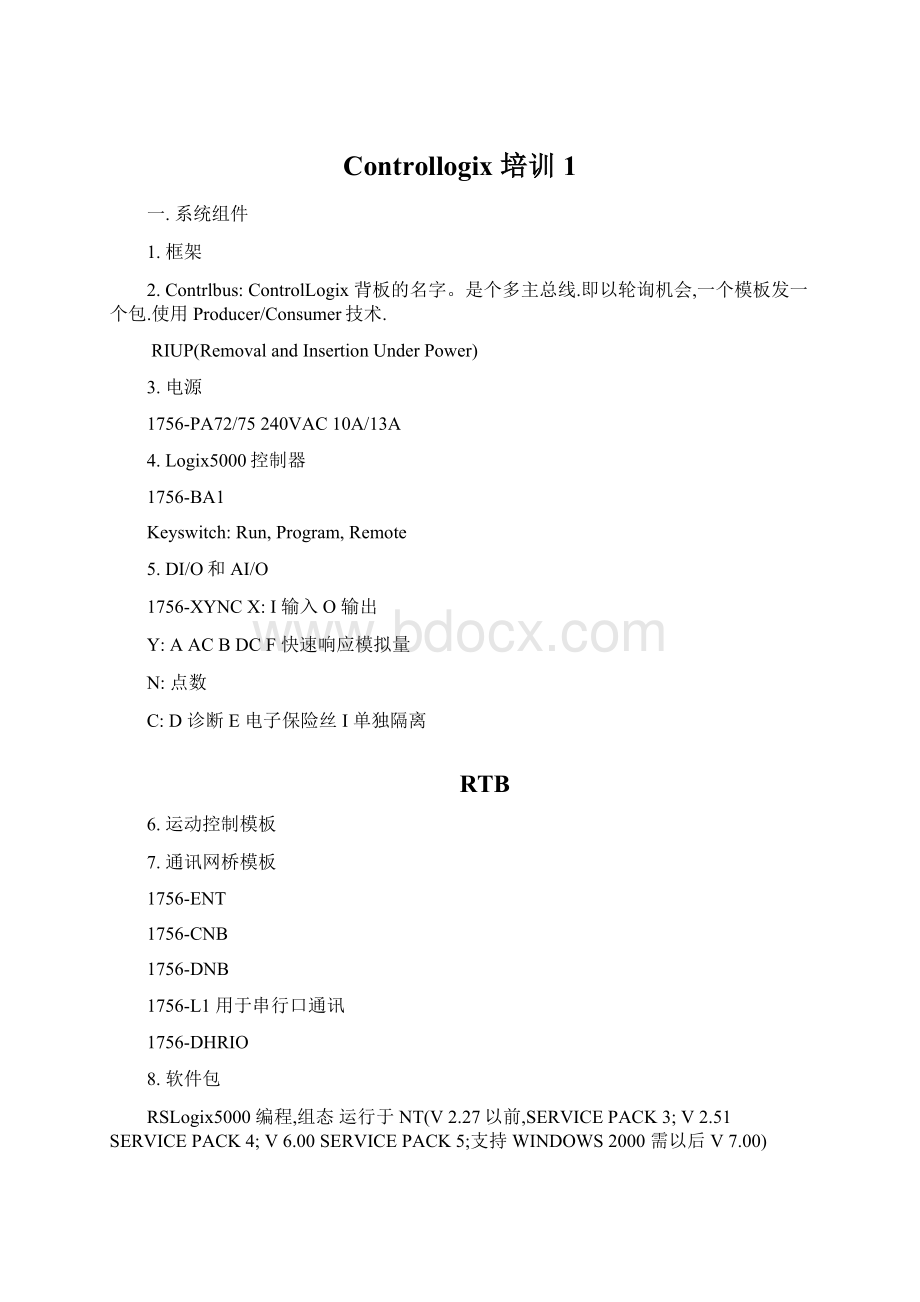
RSLinxVersion
DHRIOFimware
Analog
Isolated/Non-isolatedinput/Non-isolatedOutput
DNBFirmware
M02AE
Firmware
ENET
1.10
Q35.12
(1.81)
99.75
A/1.14
1.06.38.0
1.70.64
B/2.14
1.6
2.002
1.16
1.11
Q35.15
(1.84)
1.23
R2.10
1.07.24.0
2.00.97
2.10
R3.29
2.5
A/1.19
1.80.38.0
B/2.17
1.9/1.5/1.5
1.18
2.15
R3.31
2.10.118
2.25
R4.42
B/2.10
D/5.11
2.10.167
3.0031
2.4
1.8
2.27
1.80.38
2.51
R5.12
B/2.24
D/5.13
2.22.18.0
2.10.176
2.008
6.002
R6.19
B/2.27
D/5.22
2.20.118
3.8
RSLinx通讯
ControlFLASH更新模板固件
RSNetworkforControlNet网络调度
按系统设计采用RSNetworkforDeviceNet和ControlLogixGateway组态软件
注意:
1)编程前必须核实全部系统模板是否为RSLogix5000版本工作的固件版本
2)以新版本RSLogix5000更新模板固件.
3)一当更新,中途不能删除,否则损坏模板
练习:
使用CONTRLFLASH软件确定模板版本号(不要更新).写下输入/输出模板版本号
二.RSLogix5000
1.文件保存格式
.acd文件大.通常保存格式.不能直接保存到软盘.
.I5k文件小.export的文本或ASCII文件.必须import后,产生.acd文件,被打开
2.RSLINX组态通讯网络
1)串口
1756-CP3
选择NONE,8,1,NOHANDSHAKE,BCC
2)ControlNet
∙1756-CNB站号设定
∙1784-KTCX15卡上开关设定Basememory地址(确省D000:
0000)和BaseI/O地址(确省220,同于一般声卡地址),没有重复PC上其他设备地址(NT诊断框中Resource可查IRQ地址,I/O口地址和memory地址);
设MAC地址(赋予ControlNet上所用高地址)
3)RSLinx中RSWho核实连接.
3.通讯途径(PATH)
1)从RSLinxWhoActive选择.例选择本地控制器或通过ENET卡选择远程框架上控制器模板.
2)RecentPath
即Online,Upload,Dowdload用Online框里表示的最近使用的途径.例Driver:
AB-DF1-1表示1槽的控制器
Upload仅上载到PCRAM,SAVE才保存到硬盘
三.建立和组织项目(Project)
1.建立项目文件
(创建和组态一个控制器;
Project树形结构)
指定框架size和槽位,可以保证下载时核实保证正确
项目名(控制器名)
2.控制器属性
1)可选作为CSTMaster.
CST(CoordinatedSystemTime):
一个Controlbus框架中对所有模板保持同步的时间值
2)系统开销时间片(SystemOverheadTimeslice)
在连续任务中占的%.连续任务中最后执行的后台功能(与编程器通讯;
MSG/BT;
通过背板从串口到另一个控制器通讯;
再建立和监视I/O连接—RIUP等).缺省为10%.如果系统通讯量大可以调大.不影响周期任务的执行.
3.项目组织
1)任务(Task)
∙连续任务1个,可被周期(Periodic)任务打断
后台任务
优先权最低
∙周期任务31个,如果有连续任务
32个,如果没有连续任务
以一个重复的时间间隔(1MS—2000S)中断连续任务或以用户指定时率中断另外一个低优先权的周期任务
∙任务属性触发执行安排好的程序(Program).
32个程序/任务.
可见MAX和LASTTIME任务执行时间(MS)
任务优先权1-15,1高15低
WatchdogTimer监视任务中全部程序执行完成时间
周期任务的速率
2)程序
∙含一组子程序.指定主子程序,可按指令跳转其他子程序.另外可选故障子程序,在执行指令出错时运行
∙任务中可指定程序的执行顺序.也可以在不同工艺控制时把某程序排出调度
∙程序可修改控制器范围数据和本程序范围数据,不可以修改另外一个程序的’本地’数据
∙可显示MAX,LASTSCANTIME,不含被中断而等待的时间
∙不在任务中的程序为unschedulingprogram.例维护程序
3)删除组件
必须顺序删除组件:
子程序—程序—任务
4)设计考虑
∙没有特定时间要求的放于连续任务的程序中
∙特定时间要求的作为周期任务的程序
∙程序名用易记控制功能名;
任务名中含时间
建一个任务
改变任务属性
建一个程序
编辑程序调度
建一个子程序
赋一个子程序
四.项目中组织数据
1.内存
L1内存保存:
I/O状态和数据;
Produced/Consumed标签;
标签;
程序逻辑.
如果扩展内存,则基本内存仅放前二者,后二者放于扩展内存
2.数据的内存分配
标签占用内存空间,存放数据.没有数据表概念
1)分配给标签的基本数据类型(predefined)
Bool只有1位
Sint单字节整数
Int
Dint双字(Dword)
Real
PID
Timer
Counter
Message
Control
与Motion有关的…
每种类型都占32位.同类型的不一定放一起.一个接一个.因此Bool,Sint,Int的放用户定义的数组中可以节约内存;
定时器要放一起,可用定时器数组
2)分配给标签是用户定义的数据类型
结构(structure):
成组多种数据类型到一个连续的内存块.
用户定义的结构可由不同的数据类型组成.例如:
定义有关罐的结构数据,是液面(十进数),温度(十进数),阀门开/关(BOOL)组成.而10个罐即这样结构数据的一维数组(Tank_data).寻址可
标签名.成员名上例为Tank_data.Level
3)模板定义的数据类型
组态通讯和IO模板时自动产生,赋予一个标签
3.标签定义
1)范围定义
控制器范围:
MSG;
Produced/Consumed数据;
项目中多于一个程序用
程序范围:
仅一个程序用.所以一个逻辑中用的标签是程序范围的标签,则不用换标签名即可拷贝该逻辑到另一个程序中.
2)标签类型
基本标签,内存中命名
Produced标签
Consumed标签
别名(Alias),指向基本标签同一内存地址
3)Style
即以二进制,十进制等什么格式表现
4.数组
1)只能一个数据类型,最大三维(结构类型数据只能一维),下标0开始
数组例:
一维数组记录班记录;
三维数组记录零件号,尺寸和颜色
2)数组寻址
∙固定寻址Part[4,5,2]
∙可变寻址P[标签名或表达式]
∙位寻址P[1].2第一元素的第2位
∙可变位寻址P[2].标签名或表达式
创建一个标签(控制器范围和程序范围)和一个数组
创建一个用户定义的数据结构
创建一个别名标签
拷贝和再使用标签和用户定义的数据类型
五.输入,编辑和核实LAD
1.可以在线/离线编辑
2.一级可以顺序有多个输出
3.输入,输出可交错,但最后为输出
4.标签名例Part.Number.1标签part中Number成员的位1
I/O标签名Local:
7:
I.Data.3本地7槽输入模板的数据标签第3位
5.指令中标签名输入:
输入几个字母后,系统列出相近的标签名选择
从下拉单选择标签
如果为新标签,从右点选择中建新标签名,缺省为程序范围的标签
6.Verify:
右对处理器,左对打开的子程序
7.编辑LAD在计算机内存(以e表示)或控制器存储器(以E表示)
8.练习:
建RUNG,赋指令和标签名;
用quickkey输入指令和LAD元素;
分支;
编辑指令;
核实LAD;
拷贝和再使用RUNG,指令,BRANCHE;
二个项目中拷贝级
六.和本地I/O模板通讯
1.不正确的组态本地IO模板:
IO模板不与控制器连接和通讯,丢失IO数据
使用多于需要的系统连接,造成太多的总体系统连接数
2.1756I/O模板与传统的模板不同处:
IO模板PRODUCE和CONSUME数据
多个控制器可以同时CONSUME由IO模板PRODUCE的数据
IO数据立刻更新,而不是在扫描周期结束时
3.离线组态IO模板.一些参数说明:
1)ElectrnicKeying(电子键):
是系统特性,要求一个物理模板属性是否与软件组态的一样
–准确匹配(ExactMatch):
要求模板和其软件中的组态“全等”匹配--厂商,目录号(模板类型),系列号,major/minor版本等.(minorrevision:
版本更新不影响它的功能和软件用户接口.例清除bug)
–兼容模板:
除minorrevision版本外匹配
–禁止键:
模板不拒绝连接
2)CommunicationFormat
确定下述数据格式
a)IO数据
b)IO模板组态数据
c)Ownership
IO模板必有一个处理器作为OWNER,该处理器向它发送组态数据,启动操作
输入模板可多个Owner;
输出模板只可以有一个Owner
每个模板必须维持和一个Owner通讯,以继续操作
只听连接(Listen-OnlyConnection):
该连接允许控制器不拥有(own)I/O板而接收其数据.听模板的输入或输出回返(echo)数据.只要有一个处理器和模板的连接有效,就可以听到.只听连接也占系统连接数
输入模板有多个Owner,那他们对该模板的组态数据必须相同.当第一个Owner与改模板建立连接发送组态数据后,如另外Owner连接时有不同的组态参数,则不能建立连接,并出错;
如一个Owner断连接,只要另一个Owner保持连接,则模板仍然继续多点广播数据
二个PROJECT中有相同的IO组态数据时,可以利用拷贝/粘贴IO组态夹
由以下CommunicationFormat参数建立Ownership.
对输入模板:
Inputdata通常的故障和输入数据
FullDiagnosticInputData输入数据;
如在本地框架,数据改变时系统时钟值;
诊断数据(诊断模板)
CSTTimestamped对本地框架,时间粘贴的输入数据,该时间为数据改变时刻
对输出模板:
OutputData控制器发送输出数据
CSTTimestampedFusedData-OutputData控制器发送输出数据,对本地模板当FUSE断或RESET时,模板返回带系统时钟值的FUSE-BLOWN状态
FullDiagnostic–OutputData控制器发送输出数据,模板返回时间粘贴的诊断数据
ScheduledOutputDataOwner控制器发送输出数据和CST时间粘贴值
CSTTimestampedFuseData-ScheduledOutputData控制器发送带CST时间粘贴的输出数据.对本地模板当FUSE断或RESET时,模板返回带系统时钟值的FUSE-BLOWN状态
FullDiagnostic-ScheduledOutputData控制器发送输出数据和CST时间粘贴值.模板返回带时间粘贴的诊断数据
一当接收CommunicationFormat,不能再改变.需改变,应删除后再建立新的
模板组态
3)InhibitModuleandMajorFaultOption
禁止模板允许写模板的组态数据,但防止模板和其Owner控制器的通讯.如果禁止了通讯模板,则’关闭’依赖它的全部模板
MajorFaultOption表示当模板连接故障时产生控制器的MajorFault
4)MulticastingRate
∙数字量IO数据的多点广播受模板组态时选择RPI(RequestedPacketInterval)和COS(Changeofstate)影响.
PRI在指定的时刻(200ms-750ms)模板多点广播.其他时间的当前数据存放于板上存储器
COS板上只要有一点改变状态或在PRI率时作多点广播.该选择比较有效
∙模拟量多点广播受PRI和RTS(RealTimeSamplingRate)影响
PRI在指定的时刻(25ms-750ms)多点广播板上内存当前值.
RTS扫描输入通道,存放其数据在板上存贮器.多点广播更新的通道数据和其他状态数据到本地框架的背板.
确保控制器收到更新的数据,建议RPI>
=RTS
5)DiagnosticFeature
∙OpenWireDetection
模板检测最小的漏电流.一个漏电电阻必须接在输入设备的接点上.检测到开线,一个点级故障发给控制器
∙FieldPowerLossDetection
现场供电丢失,一个点级故障发给控制器
∙NoLoadDetection
检测无现场布线或off状态时无负载
∙FieldSideOutputVerification
LAD的变化正确地反映在设备的电源侧,即命令on时,输出on.可用于将它与输入状态比较应用
∙PulseTest
不真正改变输出负载状态,发短脉冲看输出回路是否有响应,也就是从回路的电流特征看是否有状态改变命令给回路,以确保没短路或过载。
如果没响应,自动增加测试脉冲宽度。
如增大到最大时,仍无响应,认为是无负载
∙PointLevelElectronicFusing
防止太大电流通过模板.替代模板保险丝,防止模板短路的电子保险,不替代外部保险丝、空开。
可由应用、MMI或电源cycle复位保险
∙DiagnostisLatching
检测到任一故障,将:
置位故障位,并可以在TAGLIST中进行检查;
故障数据向所有的控制器作多点广播;
IO模板的故障灯亮.
DiagnostisLatching被使能时,将会把故障琐存在置位,即使清除了错误原因,仍保留故障,除非下述方法清除:
手动在I/OModulePropertiesDialogBox中复位故障位或
LAD中CIP指令复位琐存或
POWERCYCLE复位该输出模板.
不能用IO故障标签中置0的方法复位.
必须关闭不用的IO点诊断,否则模板故障灯亮有防维护人员
∙DiagnosticTimestemping
当故障产生和清除时记录时间.模板组态时必须选择CST通讯格式
∙DiagnosticChangofState
如果使能,模板将在RPI时刻,COS(对输入模板)和诊断故障发生时向控制器发送数据.对诊断输出模板不能禁止该特性
访问IO诊断位;
使用IO诊断位报警
4.模拟量模板参数
∙Scaling
工程定标(*)
∙Clamping
限制输出范围
∙NotchFfilter
隔离模板的每一个通道滤波器有特定的频率.消除LINENOISE
∙ProcessAlarm(*)
HH,H,L,LL报警
∙RateAlarm(*)
速率报警
∙Calibration
一个一个通道的校正或模板范围的校正
∙CalibrationBias
传感器偏差的补赏
∙DigitalFilter(*)
对每个输入通道短暂干扰由指定一个时间常数来平滑数据
∙HoldForInitialization
防止跃变,控制器输出接近此值时(全刻度的0.1%内)才起作用
∙Ramping
防止模拟量在快速变化对模板的损坏
整数通讯格式时,不支持(*)
首先组态定标值,其他都与此有关.当定标变化时,其他值必须变化
5.I/O组态测试
当下载含IO组态的项目后,插入的模板信息和用户定义模板信息比较.通过下述表现辨识模板通讯问题:
∙控制器闪烁绿IO灯
∙IO模板上闪烁红OK灯
∙IO组态文件夹和控制器组织的IO模板有!
符号
∙IO模板组态诊断框的状态部分有错误报告
6.模板数据类型
控制器自动产生有关组态的每一块IO模板的IO标签.按模板不同,同模板的不同通讯格式都不一样.有
∙数据
∙组态
∙组态(只对OWNER)
∙故障信息
例,与1756-IB16D有关的标签Local:
2:
I.FaultLocal:
I.DataLocal:
I.CSTTimestampLocal:
I.OpenWire
由系统产生的标签名比较难记,可以有别名来帮助记忆
组态IO模板,包括电子key
组态数字量模板和模拟量模板
赋别名
说明IO状态LED
组态多点广播
七.组态控制器夸背板Produce和Consume数据
控制器之间可以夸背板或CONTROLNET网不要编程借助于Produce/Consume标签共享数据:
∙标签:
32位或数组(整数,定时器,计数器或用户定义数据类型组成)
∙<
=500字节
二类数据传送:
∙实时或scheduled
典型的scheduled传送用于IO数据.当设置IO模板时,运用特定连接
设定keepernode,使用RSNetworx调整网络.unscheduled网络交通(例MSG),不需要
传送最大包为500字节
∙非实时或unscheduled
Produce/Consume标签是时间严格的SCHEDULED数据.传统的是UNSCHEDULED
作为Produce/Consume标签都需要连接.控制器支持127个Consume标签.或支持250个Produce+Consume.
1.ProduceTag
TagPropertiesdialogBox指定ProduceOption和Consume数.Consume数将决定连接数
TagWindow中指定P.使能Producing
2.Consuming控制器组态
建立Producing控制器的途径.定义
∙控制器名
∙槽号
∙版本:
禁止电子keying;
Majorrevision同于项目控制器的Majorrevision
被组态共享数据的控制器是象I/O模板似列在I/O组态清单中
3.ConsumeTag
建标签,其属性指定:
拥有它的控制器名;
ConsumeTag名;
数据类型;
更新间隔(多长时间接收数据)
ConsumeTag接收目标控制器的Produce数据.如果Produce用户定义的数据,在Consuming控制器中必须是相同的尺寸和布局,为确保准确,可以在项目中拷贝结构
在TagPropertiesdialogBox指定Consume和源控制器,源(Produce)标签名.
如果一个ConsumeTag故障,所有其他来自该Producing控制器的ConsumeTag停止接收数据
ConsumeTag在RPI接收数据.必须离线和编程方式的在线修改RPI
在Edittaglist中用filter可以容易看所有ProduceTag和ConsumeTag
为准确作到二个控制器中一样的要求,用拷贝功能.例,建含一个成员的用户定义的数组结构,然后拷贝到二个控制器.Produce和Consume这个数据类型的标签.
成组数据,Produce和Consume数组或用户定义的数据类型,可以减少连接
八.组态Logix5000控制器夸ControlNet共享数据
内容:
∙组态1756-CNBR模板
∙建立和调度一个新的ControlNet网
 升级会员
升级会员 