三菱机器人虚拟仿真试题.docx
《三菱机器人虚拟仿真试题.docx》由会员分享,可在线阅读,更多相关《三菱机器人虚拟仿真试题.docx(10页珍藏版)》请在冰豆网上搜索。
三菱机器人虚拟仿真试题
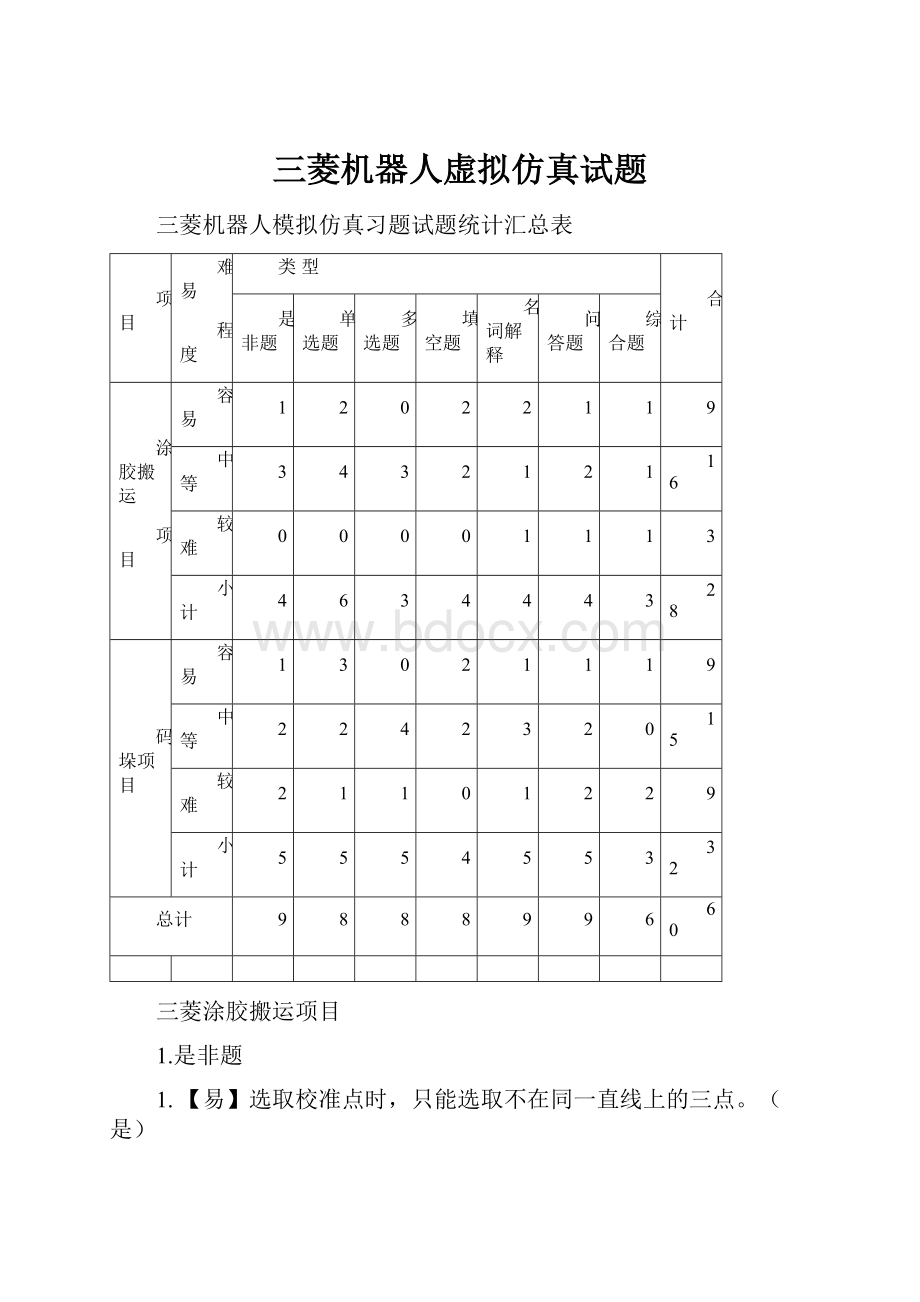
三菱机器人模拟仿真习题试题统计汇总表
项目
难易
程度
类型
合计
是非题
单选题
多选题
填空题
名词解释
问答题
综合题
涂胶搬运
项目
容易
1
2
0
2
2
1
1
9
中等
3
4
3
2
1
2
1
16
较难
0
0
0
0
1
1
1
3
小计
4
6
3
4
4
4
3
28
码垛项目
容易
1
3
0
2
1
1
1
9
中等
2
2
4
2
3
2
0
15
较难
2
1
1
0
1
2
2
9
小计
5
5
5
4
5
5
3
32
总计
9
8
8
8
9
9
6
60
三菱涂胶搬运项目
1.是非题
1.【易】选取校准点时,只能选取不在同一直线上的三点。
(是)
2.【中】在workspacepath设置保存路径,在workspacename中设置标题名,在Titlename中设工作站的名称。
(非)
3.【中】在布局过程中,只有配合中的重合指令才能将多个零件紧贴在一起。
(非)
4.【中】一般情况下,含有特定路径的程序都需要校准。
(是)
2.单选题
1.【易】在工作站创建完成之后,有(B)种方法打开已有的工作站。
A.1B.2C.3D.4
2.【易】对零件进行移动和旋转有几种方式(C)
A.1B.2C.3D.4
3.【中】程序的校准是在哪种模式进行的?
(C)
A.RunB.在线C.模拟D.离线
4.【中】制作工件时,零件的名后缀为?
(B)
A.XX_handB.XX_workC.XX_ToolATCD.XX__MasterATC
5.
【中】制作抓手时,零件的名后缀为?
(A)
6.【中】HandI/O对话框中将Pick1的值不能为
?
(D)
A.21
B.17
C.10D.-1
3.多选题
1.【中】在布局的过程中,主要用到下;下列哪几个指令。
(A,B,C)
A.配合B.插入零部件C.移动零部件D.参考集合体
2.【中】设置搬运示教点时,通过(B,D)来改变位置的姿态。
A.手动输入B.通过Position指令C.鼠标拖动D.通过Joint指令
3.【中】制作机器人抓手时,需要设置下列哪些坐标系?
(A,C)
A.Orig1B.坐标系1C.Pick1D.坐标系2
4.填空题
1.【易】三菱机器人模拟仿真在Solidworks_和MELF—Works软件中进行。
2.【易】在工作站创建完成之后,需要在工作站内进行场景布局,首先要打
开已创建的工作站,共有两种打开方式。
3.【中】搬运工件需要在Robotoperation指令下操作完成。
4.【中】在solidworks中单击Virtualcontorller,会出现机器人控制面
板。
5.名词解释题
2.【易】解释DLY在程序中的意义。
答:
表示延迟的意思。
例如:
DLY2表示延时2S
3.【中】M_out()=1,M_OUT()=(分别表示什么?
答:
分别表示抓手的合与松的信号指令。
4.【难】解释tooloffset是什么?
答:
tooloffset是对工具的设定,通过其中的X,Y,Z设定路径所在的
位置,通过A,E,C设置工具的指向与行走方向。
6.问答题
1.【易】程序的校准在哪个程序中进行的?
2.【中】如何对零件进行移动和旋转?
答:
第一种方式用移动零部件指令移动零件;
第二种方式单击右键,选在三重轴,利用三重轴进行移动与翻转;
第三种方式鼠标左键可以移动零部件,鼠标右键可以翻转零部件。
3.【中】Virtualcontorller中的up和down指令有什么作用?
答:
可以通过UP和DOWJN选择程序和改变机器人的运动速度
4.【难】滚动鼠标中键、按住并拖动鼠标中键、按住并拖动鼠标右键Ctrl+鼠标中键并拖动、Shift+鼠标中键并拖动分别有何作用。
答:
依次为放缩视图、旋转视图、选择视图方向、移动视图位置、放缩视图。
7.综合题
1.【易】如何放置机器人,并且固定其位置
答:
在MELFA-WOR对舌框中打开【RobotSetting],在RobotSetting对
话框中选择RC1并打开,会出现RobotdetailsSetting对话框,因为机器人被隐藏起来了,所以选中【showrobot],屏幕会出现一个不在布局场景内的机器人,然后我们勾选【Existtravelbase],并单击下面的方框,方框的颜色会变成浅绿色,紧接着选中机器人底座【Robot1]坐标系,这样机器人就会自动移动到底座上。
2.【中]在模拟搬运过程中,如何设置抓手的信号。
答:
打开【work-flow],并在Teaching中点击【GetLocation]获取位置点,然后在MELFA-WORKS话框中打开【RobotSetting],在RobotSetting对话框中选择RC2并打开,会出现RobotdetailsSetting对话框,在该对话
框中单击打开【SignalSetting],在HandI/O对话框中将Pick1后的-1改为21,并单击黄色背景的连接按钮,使共建与抓手连接在一起,完成之后关闭对话框。
在物体搬到目标位置后,将黄色背景的连接按钮断开,即可放下物体。
3.【难]如何设置路径,并且生成程序文件。
答:
校准点获取完成之后,点击【work-flow]按钮,屏幕中会出现work-flow对话框,然后单击【path],并在pathl中点击【Add]添加路径一Path1,然后双击Path1,出现processingsetting对话框。
接着选中工件,并选中所设
路径的边线,添加在processingsetting中,添加之后工件上会出现三种不同
颜色指向线,通过tooloffset可以改变方向,在processingsetting中也可
以通过【del】删除路径,通过tooloffset将工具的指向设置为竖直之后,双
击所添加的路径,点击0K退出processingsetting,然后点击【Trial】测试
路径是否可以完成。
成功之后,按照相同的过程依次设置其他路径,所有路径设置完成后,在对
话框左下方点击【Add】添加流程Flowl并选中,然后依次选中路径并点击【Addtoflow】将路径添加到Flowl,然后点击【step】再次检测。
以上所有完成之后,点击【conv】并保存,这样路径就设置完成。
三菱码垛项目
1.是非题
1.【易】在布局过程中,配合功能必须要选取两个面,才可以进行配合。
(是)
2.【易】测量工具只能计算点到点的距离,因此必须要选取两个点。
(非)
3.【中】在布局过程中,平行指令能将多个零件紧贴在一起。
(非)
4.【难】DefPlt1,P14_00,P15_00,P16_00,P17_00,2,3,1程序语句中,
最后一个1代表的Z形轨迹。
(是)
5.【难】程序中的*Loop指的是程序的第一行(非)
2.单选题
1.【易】在码垛项目中我们选择哪种型号的机器人(A)
A.RV-12SDLC-SUL
B.RV-13SDLC-SUL
CRV-14SDLC-SUL
1.【易】在调节机器人位置和移动抓手位置过程中有几种模式切换。
(E)
A.1E.2C.3D.4
2.【易】插入多个相同的物体可以用到哪两个快捷键进行复制粘贴(A)
A.Ctrl+C和Ctrl+V
B.shift+C禾口shift+V
C.Alt+C和Alt+C
3.
【中】机器人取点过程主要需要用到哪个功能(B)
4.【中】将机器人吸盘水平旋转需要调节哪个轴(C)
A.J2B.J4C.J6D.J8
5.【难】编写程序是,程序循环的标志是(B)
A丄OOPB.*LOOPC.#LOOPD.&LOOP
3.多选题
1.【中】编写循环程序时,开头和结束分别是什么?
(A,C)
A.*LOOPB.&LOOPC.IfM<=16Then*LoopD.IfM<=16Then&Loop
2.【中】如何插入多个相同的零件?
(A,B)
A.直接通过【插入】功能B.通过复制粘贴功能C.直接通过鼠标拖动
3.【中】调节机器人的模式有两种(B,C)
straightline
A.functionB.positionC.jD.
4.【中】配合中有哪些功能?
(A,C,D)
A.重合B.相交C.平行D.垂直
5.【难】如果矩形的四个顶点按照顺时针分别为P1,P2,P3,P4,机器走Z
字形的时候正确的顺序是。
(B,D)
A.P1,
P2,
P3,
P4
B.P1,
P2,
P4,
P3
C.P4,
P3,
P2,
P1
D.P4,
P3,
P1,
P2
四.填空题
1.【易】在布局过程中,在传送带上放置箱子,通过机器人吸盘工具的吸取、释放信号放置每一个箱子,这样做方便且快速。
2.【易】在MELFA-WOR对舌框中打开【RobotSetting],导入机器人。
3.【中]所有路径设置完成后,点击【Add]添加流程,然后依次选中路径并点击Addtoflow,最后点击【step]进行检测。
4.【中]在离线文件下,找到程序文件,选中并右击,此时会看到【全写入]指令,单击该指令,将程序写入到控制器内。
五.名词解释题
1.【易]解释DefPlt在程序中的意义?
答:
表示定义一个平台。
例如:
DefPlt1表示定义平台1
2.【难]解释P10=(Plt1,M)中M和P10的意思?
答:
M是代指第M号箱子,P10表示平台1中第M号箱子的坐标
3.【难】解释IfM<=6Then*Loop的意思?
答:
当M小于等于6之前程序一直在*Loop中循环
4.【中】解释switchP/J的意思?
答:
P和J是两种调节机器人的模式,P是点模式,可以通过坐标轴的方式调节J是轴调节方式,通过机器人的关节进行调节机器人的位置。
5.【中】解释conv的意思?
答:
在rtBox生成相应的程序文件。
七.问答题
1.【易】在布局当中运用到哪些工具?
答:
【插入】【配个】【移动】。
2.【中】抓手通过哪个功能准确地移动到相应的点?
答:
在robertoperation点击switchP/J切换成position模式对XYZ进行操作。
3.【中】如何对零件等比例进行放大缩小?
答:
打开零件所在的文件,点插入,选择特征里面的缩放比例,进行放大
和缩小。
4.
这句话什么意思?
【难】程序中DefPlt1,P1,P2,P3,P4,3,2,1
答:
DefPlt1定义平台,P1,P2,P3,P4,分别是矩形的四个点,3,2是三行两列排布,1是Z字形轨迹。
5.【难】如何复制出多个工件或物体?
答:
选择需要复制的附体,键盘按下Ctrl+C,在所需要插入的地方按下
Ctrl+V就可以复制出多个物体或者工件。
七.综合题
1.【易】如何将12个箱子分上下两层整齐地放置在垛盘上面。
答:
打开【插入】,在【零部件】中选择【现有零件】,插入木箱至工作区,通过Corl+C和Corl+V对木箱进行复制粘贴,达到12个。
打开【配合】,选择每个面上的两条线,对它们进行【重合】,再将已经配合好的两个木箱中一个箱子和第三个箱子进行【配合】,依次排好第一层,再排第二层。
将箱子放置好后,同样是通过【配合】将已经放好的12个箱子放置在垛盘上。
2.【难】怎么样通过机器人抓手,等距离放置N个箱子在传送带上
答:
先将机器人的抓手改为指针形状,点击箱子上的一点,让机器人的抓手运动到第一个箱子的上方,接着换回我们需要的吸盘式抓手,通过【测量】选取木箱上的【Orig1】点和吸盘上的【Pick1】点,计算出两点之间的距离,得到X,Y,Z的值。
打开【RobertOperation】,按下【switchP/J】,在原有的X,Y,Z值的基础上增加或减少通过测量得到的X,Y,Z值,单击回车按钮,机器人将准确地移动到木箱上面,打开【RobertSetting】选择【RC1】中
【signalSetting】,单击机器人的吸取信号,这样机器人就吸附了箱子,通过【Robertoperation】中的J6轴旋转吸盘,让木箱位置与传送带平行。
同样的操作点击【放下】信号,将木箱放置在传送带上。
接下来放置第二个木箱,
点开【RobertOperation】,按下【switchP/J】,可以看见L2的值为0,此时是第一个木箱的位置,然后输入300,就是在原坐标上增加300,就是第二
个木箱的位置,机器人也会自动的移动到第二个木箱的位置上去,接着通过移动木箱,将木箱移动到吸盘的正下方,通过抓取信号将木箱抓取,再放下,就可以看到第二个木箱正确放置了。
重复上述操作,依次放置其余木箱。
3.【难】如何编写一段循环程序。
答:
程序的开头为*LOOP其中*+英文字母为固定的开头格式,标记循环开
头,循环中需要有变量假设为M先令M=1表示第一次开始,接下来是主体部分,加入我们需要循环的程序,在程序的倒数第二行,是M=M+1表示运行到这
里的时候,M的值自动加一,开始运行第二次循环,最后一句是IfM<=aThen
*Loop,a是一个整数,表示循环a次后结束循环。
 升级会员
升级会员 