运动学部分作业参考答案Word格式文档下载.docx
《运动学部分作业参考答案Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《运动学部分作业参考答案Word格式文档下载.docx(37页珍藏版)》请在冰豆网上搜索。
5.56
sin450sin900
ABsin900
16.43
AB
rad/s
(2)M点的速度
vMvA
vAωAB
A
vM
vAM
M
B
θ+45o
v1v
2.78m/s
AMAB
应用余弦定理
vv2v22vv
cos450
6.67
MAAMAAM
注:
本题也可以用速度瞬心法求连杆AB的角速度和M点的速度。
根据vA和vB得到AB杆的速度瞬心C;
C
ωAB
Oφθ
OB402
1002
240100cos180o
45o
16.43o
124.2cm
AC2
OBOA
2124.240135.6cm
MC135.62
502
2135.650cos45o
120.0cm
AB杆的角速度:
vA2.4
AB5.56
AC1.356
M点的速度:
vMABMC
5.56120.0667cm/s
10-5图示四连杆机构中,OA=O1B=1/2AB,曲柄以角速度ω=3rad/s绕O轴转动;
求在
图示位置时杆AB和杆O1B的角速度。
vAA
OO1
ωO1B
(1)分析运动:
OA和O1B作定轴转动,AB作平面运动。
根据vA和vB得到AB杆的速度瞬心是O点;
(2)AB杆的角速度:
3
vArad/s
OA
(3)B点的速度
vBABOB33OA
(4)O1B杆的角速度:
vB33OA
5.2rad/s
O1B
O1BOA
注1:
本题也可以用基点法求B点的速度,再求O1B杆的角速度。
90
O
O1vA
以A为基点,B点的速度和O1B的角速度是:
vBvAtgOA
OB
33OA
vBO1B
335.2
注2:
本题还可以用速度投影法求B点的速度,再求O1B杆的角速度。
vAvB
OB
O1
vBcos
vAsin
vBvAtg
vBO1B
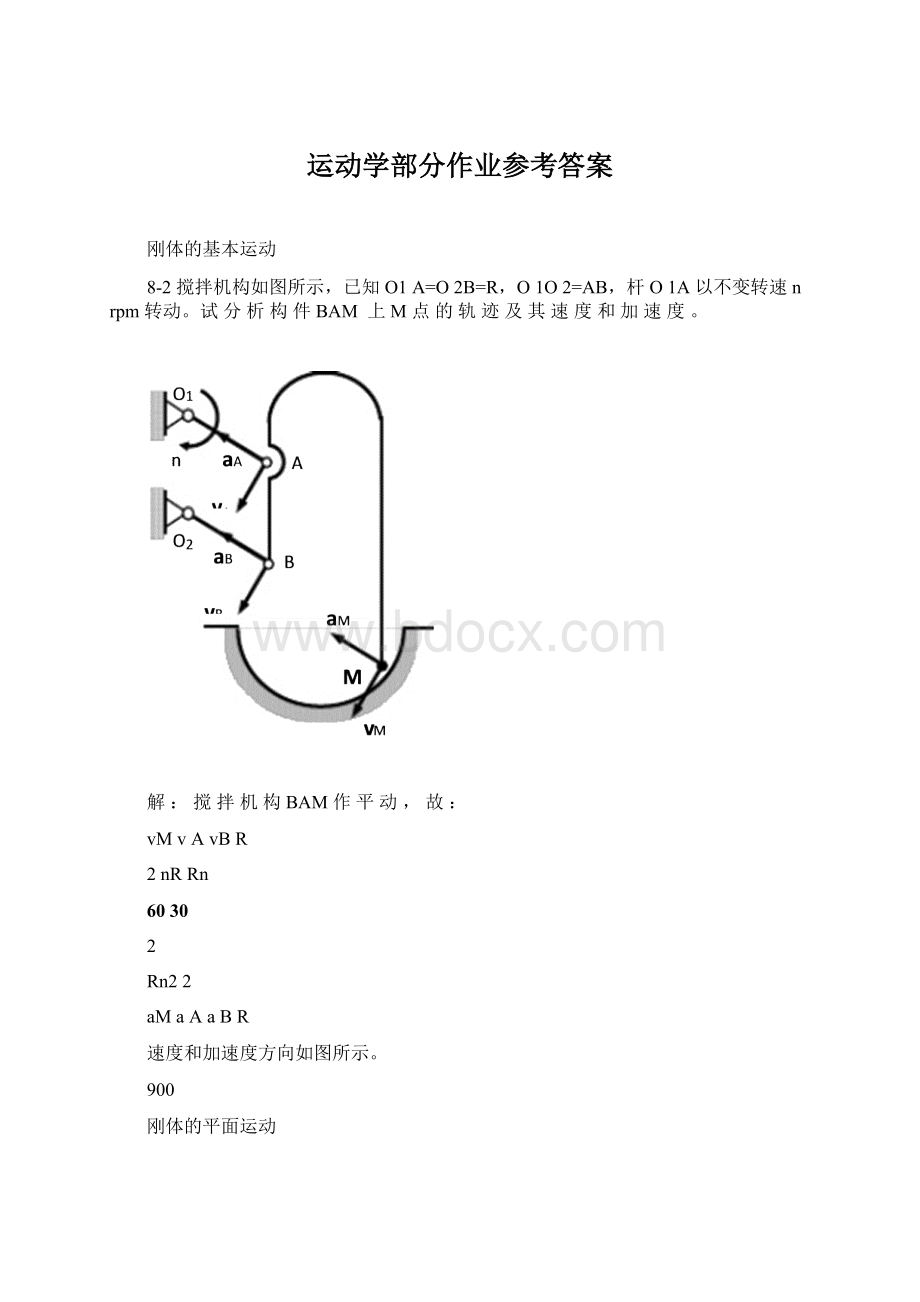
10-6图示曲柄摇块机构中,曲柄OA以角速度ω0绕O轴转动,带动连杆AC在摇块B内滑
动,摇块及与其刚连的BD杆则绕B铰转动,杆BD长l;
求在图示位置时摇块的角速度及D点的速度。
vD
AD
ω0vB
O90
300
ωBD
ωAC
P
OA和BD作定轴转动,AC作平面运动。
根据vA和vB得到AC杆的速度瞬心是P点;
(2)AC杆的角速度:
vA0OA0
AC
AP2AB4
(3)BD杆的角速度与AC杆的角速度相等,由此得到D点的速度;
l0
vDBDBDACBD
4
本题也可以用基点法求AC杆的角速度。
AωACD
O90300
BvAB
以A为基点,B点相对于A点的速度是:
AC杆的角速度是:
sin30o
1OA
20
1
OA0
2AB4
D点的速度:
vl0
DBDBDACBD
10-8图示双曲柄连杆机构中,主动曲柄OA与从动曲柄OD都绕O轴转动,滑块B与滑块
E用杆BE连接。
主动曲柄以匀角速度0=12rad/s转动,OA=10cm,AB=26cm,BE
=OD=12cm,DE=123cm。
求当曲柄OA位于图示铅垂位置时,从动曲柄OD和连杆
DE的角速度。
vEDAvA
vEDω0
OvE
E
vBB
OA和OD作定轴转动,AB和DE作平面运动,DE杆作平动。
由点A、B的速度方向可知连杆AB在图示位置作瞬时平动。
(2)A、B、E三点的速度相同;
vEvBvA
0OA
1.2m/s
(3)选E点为基点,画出D点的速度矢量图;
vDvE
vED
vEvD
ODDEOE
22
OEOBBEABOA
BE12cm
vD3vE
vEDvE
(4)曲柄OD和连杆DE的角速度:
OD
103
DE
10-10轮O在水平面内滚动而不滑动,轮缘上固定销钉B,此销钉在摇杆O1A的槽内滑动,并带动摇杆绕O1轴转动。
已知轮的半径R=50cm,在图示位置时AO1是轮的切线,轮心的速度υ0=20cm/s,摇杆与水平面的交角α=600。
求摇杆的角速度。
vr
va
v0O
veω01A
ω0R
αO1
摇杆O1A作定轴转动,轮O作平面运动;
(2)轮O与地面接触点C是速度瞬心,由此求出B的速度;
vBCv02Rcos30o
203
cm/s
R
B0
(3)选轮上B点为动点,动系建在摇杆上;
vavevr
vavB
veva
cos600
203cos600
cm/s
(4)摇杆的角速度
O1A
veO1B
1030.2rad/s
503
10-11图示曲柄连杆机构带动摇杆O1C绕O1轴摆动,连杆AD上装有两个滑块,滑块B在水平槽滑动,而滑块D在摇杆O1C的槽内滑动。
已知曲柄长OA=5cm,其绕O轴的角速度ω0=10rad/s,在图示位置时,曲柄与水平线成90o角,摇杆与水平线成60o角,距离O1D=7cm.。
ω0B
OvB
ve
ω01C
D
(1)分析运动:
曲柄OA和摇杆O1C作定轴转动,连杆AD作平面运动;
由点A、B的速度方向可知连杆AD在图示位置作瞬时平动;
vDvBvA
50cm/s
(2)选滑块D为动点,动系建在摇杆O1C上;
vvsin600vsin600
43.3cm/s
eaD
(3)摇杆的角速度
O1C
veO1D
6.19rad/s
10-14滚压机构的滚子沿水平面滚动而不滑动。
已知曲柄OA长r=10cm,以匀转速n=
30rpm转动。
连杆AB长l=17.3cm,滚子半径R=10cm,求在图示位置时滚子的角速度及角加速度。
nl
r0vA
O60θ
ωB
曲柄OA作定轴转动,连杆AC和滚子作平面运动;
几何关系:
OAsin60o
ABsin
10
17.3
sin60o
0.5300
(2)选A点为基点,决定B点的速度;
根据已知条件,可得
vAr
nr10
vBcos300
36.3cm/s
B3.63rad/sR
vvsin300
18.2
1.05
ABBAB
(3)选A点为基点,决定B点的加速度;
aanaan
BAABAB
AωAB
aA
aB
aABn
θ
aAB
ξ
式中,
an2AB19.1cm/s2
ABAB
将矢量式向ξ轴投影,有
acos300ana
a
AB22
cm/s2
BABB
cos300
(4)滚子的角加速度
aB2.2rad/s2R
10-15图示曲柄连杆机构中,曲柄长20cm,以匀角速度ω0=10rad/s转动,连杆长100cm。
求在图示位置时连杆的角速度与角加速度以及滑块B的加速度。
ω090
450
曲柄OA作定轴转动,连杆AB作平面运动,滑块作平动;
(2)选A点为基点,求B点的速度;
vBvAB
vAvAB
vA0OA
200
2rad/s
(3)选A点为基点,求B点的加速度;
BaAB
aaABn
已知:
an2OA2000cm/m2an2AB
400cm/s2
A0ABAB
将矢量式向ξ、η轴投影,有
an
acos450ana
AB565.7
0nn02
aBsin45
aAB
aAaAB
aAaBsin451600
AB16
点的合成运动
9-5图示曲柄滑道机构中,曲柄长OA=r,它以匀角速度绕O轴转动。
装在水平上的滑槽DE与水平线成60o角。
求当曲柄与水平线的交角分别为=0、30o、60o时,杆BC的速度。
y’A
x’
CB
60
vrva
(1)选动点A,动系建在ABC上;
(2)运动分析:
牵连运动是平动,相对运动是沿ED滑槽的直线运动,绝对运动是绕O
点的圆周运动;
速度矢量图如图所示。
由正弦定理得:
sin120o
sin30o
sin90o
vevao
sin120
当=0o时,
r
e
方向为水平向左。
当=30o时,
ve0
当=60o时,
方向为水平向右。
本题目也可以分别讨论=0o、30o和60o时速度矢量关系,如下所示。
vavr
60o
Ave
oo
veO
30O
6060O
9-6图示曲柄滑道机构中,杆BC为水平,而杆DE保持铅垂。
曲柄长OA=10cm,以匀角速度=20rad/s绕O轴转动,通过滑块A使杆BC作往复运动。
求当曲柄与水平线的
交角分别为=0、30o、90o时,杆BC的速度。
y’
BDx’C
精品资料
(1)选动点A,动系建在BDC上;
牵连运动是直线平动,相对运动是沿DE的直线运动,绝对运动绕O点的圆周运动,速度矢量图如图所示。
var
cm/
sve
vasin200sin
当=0o时
ve0;
当=30o时
ve100cm/s;
当=90o时
ve200cm/s
本题目也可以分别讨论=0o、30o和90o时速度矢量关系,如下所示。
vrvr
vave
O30oO
90o
9-9摇杆OC经过固定在齿条AB上的销子K带动齿条上下平动,齿条又带动半径为10cm的齿轮绕O1轴转动。
如在图示位置时摇杆的角速度=0.5rad/s,求此时齿轮的角速度。
K
60x’
veO1
40cm
(1)选动点K,动系建在摇杆OC上;
牵连运动是绕O轴的定轴转动,相对运动是沿OC的直线运动,绝对运动是上下的直线运动。
veOK
400.523.1cm/s
cos30
ve23.126.7cm/s
cos30cos30
(3)齿条与齿轮接触点的速度等于K点的绝对速度,所以齿轮的角速度是
va26.72.67rad/s
11010
9-10图示铰接四边形机构中,O1A=O2B=10cm又O1O2=AB,且杆O1A以匀角速度=2rad/s绕O1轴转动。
AB杆上有一套筒C,此筒与CD杆相铰接,机构的各部件都在同
一铅垂面内。
求当=60o时,CD杆的速度和加速度。
O1va
O2e
aAvAaB
ACB
vrC
aa
ae
Car
(1)选动点C,动系建在AB上;
牵连运动是平动,相对运动是水平直线运动,绝对运动是上下直线运动;
速度和加速度矢量图如图所示。
vevA
vBO1A
10220cm/s
(3)CD杆的速度
vavecos20cos6010cm/s
(4)CD杆的加速度
aaaear
aOA21022
40cm/s2
e1
aaaesin6034.6
9-11图示曲柄滑道机构中,导杆上有圆弧形滑槽,其半径R=10cm,圆心在导杆上。
曲柄
长OA=10cm,以匀角速度=4rad/s绕O轴转动。
求当=30o时导杆CB的速度和加速度。
BO1C
6060
veA
aeA
art
arn
(1)选动点A,动系建在导杆CB上;
牵连运动是平动,相对运动是曲线运动,绝对运动是绕O的圆周运动;
(3)CB杆的速度
vavAOA
vCBvevavr
0.141.26m/s
1.26m/s
加速度合成定理:
aaaa
aerr
a0anOA21.62
aa
nvr
rR
1.2615.88m/s
0.1
将矢量式向轴投影
aaaancos60acos30an
aeraer
a1ancos60an
ear
11.6
2cos6015.8827.3
9-12半圆形凸轮以匀速度vo水平向右运动,推动杆AB沿铅垂方向运动。
如凸轮半径为R,求在图示位置时AB杆的速度和加速度。
vearno
x’Rv0
30o30
(1)选动点A,动系建在凸轮上;
牵连运动是水平平动,相对运动是沿凸轮的圆周运动,绝对运动是上下直线运动;
速度和加速度矢量图如图所示。
(3)AB杆的速度
vev0
vavetg300.577v0
vr2va
1.154v0
速度方向向上。
(4)AB杆的加速度加速度合成定理:
v2
re
anr
1.332v2
aa0
RR
ar
1.540
加速度方向向下。
9-14杆OA绕定轴O转动,圆盘绕动轴A转动,已知杆长l=20cm,圆盘半径r=10cm,在图示位置时,杆的角速度和角加速度为=4rad/s,=3rad/s2,圆盘相对于杆OA的角速度和角加速度为r=6rad/s,r=4rad/s2。
求圆盘上M1和M2点的绝对
速度及绝对加速度。
M2r
O60o
M1
Aωr
v1e
v1a
v1r
v2a
v2e
v2r
M2
(1)选动点M1、M2,动系建在OA杆上;
牵连运动是绕O轴的定轴转动,相对运动是绕A轴的转动,绝对运动是曲线运动;
(3)速度矢量图如图所示。
M1点速度:
v1e
OM1
rL304120
v1r
rr10660
v1a
1206060cm/s
M2点速度:
vr2l2102
202
489.44
2e
v2rrr10660
arctgl
arctg263.435o
v2a
v2ev2r2v2e
v2r
cos82.5
(4)加速度矢量图如图所示。
a1r
a1k
a2k
a2r
a2e
a1a
a1rn
nA
1e
a1e
a2a
na2rn
aaaaanaana
aaaeerrk
M1点加速度:
a1e(rl)30390cm/s
a1e
(rl)2
3016480cm/s2
ar10440cm/s2
1r
a1r
r1036360cm/s2
a1k
2evr
2460480cm/s2
矢量式向轴和轴投影:
aaa
904050cm/s2
1a1e1r
nn
480360480360cm/s2
1a1e1r1k
363cm/s2
1a1a1a
M2点加速度:
a2e
r2l2
102
202
367.08cm/s2
r2l22
20242
357.76cm/s2
a2rr10440cm/s
a2r
r1062360cm/s2
a2k
2evr2460480cm/s
 升级会员
升级会员 