基于监督分类的ENVI遥感技术Word文档格式.docx
《基于监督分类的ENVI遥感技术Word文档格式.docx》由会员分享,可在线阅读,更多相关《基于监督分类的ENVI遥感技术Word文档格式.docx(16页珍藏版)》请在冰豆网上搜索。
1.2训练样区的选择
训练样区应选择在地物类型分布典型的地区,这样才不会导致错
分的像元太多出现。
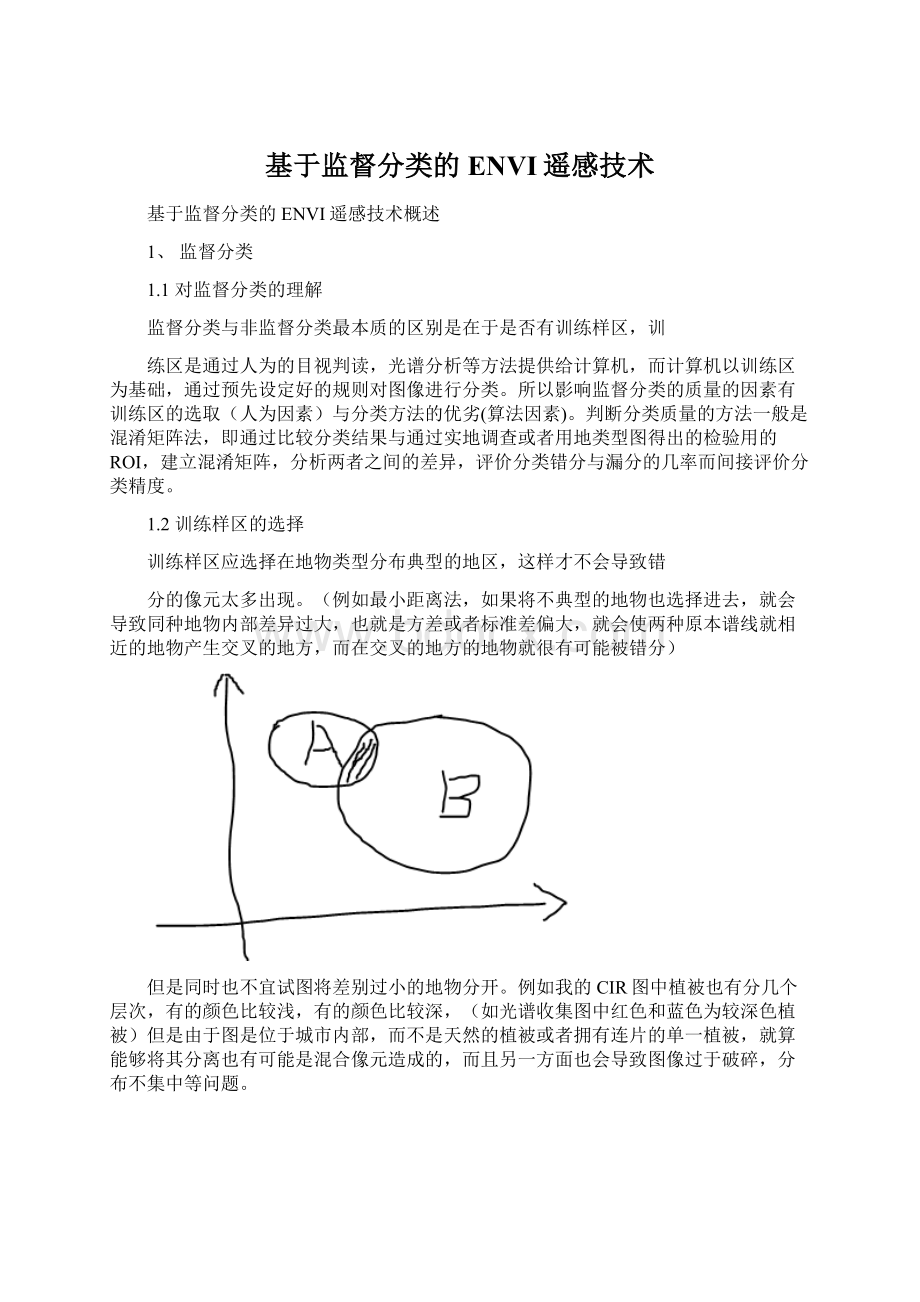
(例如最小距离法,如果将不典型的地物也选择进去,就会导致同种地物内部差异过大,也就是方差或者标准差偏大,就会使两种原本谱线就相近的地物产生交叉的地方,而在交叉的地方的地物就很有可能被错分)
但是同时也不宜试图将差别过小的地物分开。
例如我的CIR图中植被也有分几个层次,有的颜色比较浅,有的颜色比较深,(如光谱收集图中红色和蓝色为较深色植被)但是由于图是位于城市内部,而不是天然的植被或者拥有连片的单一植被,就算能够将其分离也有可能是混合像元造成的,而且另一方面也会导致图像过于破碎,分布不集中等问题。
在训练样区的选择中,一般可以将地物分为水体、岩石(城市)、植被三大类,因为这三类的光谱差异最大,较容易且准确地分出来。
而结合实际图讨论的话。
我将水体继续分为纯净的海水、含沙的海水、河水、湖水及盐池(只有一片),其中为了效果不太混杂,除了盐池之外的其他水体都用blue显示,而颜色深度由水体含沙量决定。
(含沙量:
含沙海水=河水>
湖水>
清洁海水),植被就分为普通植被和水体植被(水体富营养化),由于水体植被混杂了水体和植被两种光谱信息,所以差别也比较明显,而且只有在图幅左下角一部分鱼塘才有出现,也不会分出来过于破碎。
岩石分为沙滩和城市,沙滩也是含水量较高的沙子,所以反射率比一般的城市偏低。
分为一共九种,不同地物用不同颜色显示,接近地物用接近颜色显示。
1.3对比使用不同监督分类方法的结果:
以下操作均不改变参数的设置,如平行管道法中的最大标准差,如果设置为空值的话就不会出现未分类地物,但是现在只是需要比较几种方法的优劣,而不必牺牲精度来达到全图分类的目的。
1平行管道法(利用训练样区构造分类盒子)
图中有小部分鱼塘未能分类,通过对比其余周边海水的差别发现,它既没有植被的红肩,也没有水体的低反射,但是也应该归为海水。
另外,海边的浅滩(紫红色)很大一部分也被分为了城市用地,估计是城市用地的反射率波动太大,将沙滩也包括到城市的分类器里去了。
并且分类结果中河流里有许多属于城市的噪点,错分原因可能也是上面说的。
2最小距离法(考虑地物光谱的距离)
最小距离法对于水体的分类无疑比上一种方法好,几乎没有其他噪点,但是缺点也很明显,就是只有海边的小部分沙滩将城市内的大部分道路也分进去了。
原因可能有两个,其一,我在选取感兴趣区的时候由于道路比较狭窄,难以构造面状区域,其二,道路是混凝土构造,与沙滩的性质接近。
下面对道路与沙滩的光谱信息作对比
不难发现被错分部分还是比较接近岩石的反射率曲线,而沙滩则在中远红外部分继续有超低反射率,理应不会被错分才对。
下面对ROI加入道路的选取之后再分类。
第二次用最小距离法分类结果:
结果并没太大改观,不过能够排除训练样区选取不准确的因素了。
对于沙滩的分类只是其中最大的问题,而在盐池的分类也不对。
3马氏距离法(考虑地物光谱的距离&
方差)
虽然将光谱的波动性也考虑进去了,看到的只是出错范围的缩小,但是也仍有较多的错分地区。
如上图画出的三处:
1、城市用地被分为水体。
2、沙滩上近海端出现植被。
3、小部分道路被分为沙滩。
4最大似然法(考虑地物光谱的距离&
方差&
相似概率,最常用)
最大似然法主要运用统计学的方法,考虑了像元与各类地物相似概率,所以从目视判断上来看效果也是最好的,几乎没有错分,海水中的含沙部分纹理也能看出来,其中圈出来部分应该是在陆地上的植被,但是却被分为了seaplant(水体富营养化部分),但是总体效果仍是比较理想的。
5光谱角法(一般用于高光谱数据)
光谱角法是基于构建高维空间对比光谱偏移量得出分类结果的方法,一般对高光谱影响比较有效。
1.4细节对比
由1-6分别是:
CIR图,平行管道法,最小距离法,马氏距离法,最大似然法,光谱角法。
对海岸线:
对道路:
对植被:
综合分析各种方法,最大似然法最优,最小距离法次之,而对于城市用地的分类是出错几率最大的地方。
1.5建立混淆矩阵
首先要建立检验用的ROI,要求该区域是客观的地物类型反映(可
通过用地类型图或实地考察得到),而由于实验条件所限,现根据Googleearth来构建。
其要求尽量细碎(保证精度)和分散(在图幅范围内均匀分布),检验数量尽可能高(500pixel,但对于数量较少的地物类型可适当减少)
其中Kappa系数是综合计算四个精度指标得出的数值,该值越大(越接近1),分类精度越高。
从结果可以看出,与目视判断的分析是一致的。
Kappa系数和分类精度最高的是最大似然法,最小距离法次之,最差的是光谱角法。
2、决策树分类
2.1决策树分类原理
决策树分类与一般的分类方法的思路有较大的差别,决策树分
并不是考虑像元之间所有光谱信息的差别,而是可以有选择性地利用不同波段之间的显著差异或者各种指数上的差异达到分类目的,而且决策树分类是逐层分类的,可以将大类细分,所以如果指标选取得好的话精度也较高。
2.2决策树的建立
首先可以利用上一次实验的成果,即利用B4-B2的波段计算结果
图像将水体分出来。
而下一个叶子节点则是从非水体部分也是利用上一实验成果中的DVI差值植被指数通过阈值分割区分得到的。
(阈值为>
=0.1)这里进行一次execute观察结果是令人满意的。
接下来考虑利用含沙量将水体分为含沙量高的和纯净水体,由于含沙量高的水体总体反射率偏高,所以利用前四个波段的累加并设置适当的阈值就可以分类出来。
=0.15)
但是我们从下图发现,之前提到过的浮游植物也被分为了城市用地,分析其光谱信息可以得出是因为其掺杂了一部分水体的光谱,所以总体反射率偏低,所以利用差值植被指数并不能达到0.1的指标,但是其仍然具有红肩的趋势,所以可以利用比值植被指数RVI来区分。
加入RVI的叶子节点后:
做到这里,我就停止了,二叉树一共有4层,我们发现可以分类的地物只分了四种,其中我认为有两个原因,其一,我的时间不够,其二,也是最重要的一点,是我对不同地物差异的分析不够,例如城市用地反射率曲线比较复杂,而水体除了含沙量,而由于近海,湖水,河水和纯净海水在目视光谱曲线上又发现不到太大的差别,不像监督分类,只需要看上去是不同类别的就可以分。
这里希望以后能改进!
3、分类后处理(以最大似然法为例)
这里只做简单的处理,包括用地类型面积统计、给类别赋色、专题制图。
如城市用地类型像元数占总图幅的44.1313%,所以其占地面积可以算作1000*1000*30*30*44.1313%m=3.971817^10m,约为4万平方公里。
对分类图重新配色:
专题制图:
2014.12.19
 升级会员
升级会员 