机构的结构分析习题答案Word格式.docx
《机构的结构分析习题答案Word格式.docx》由会员分享,可在线阅读,更多相关《机构的结构分析习题答案Word格式.docx(28页珍藏版)》请在冰豆网上搜索。
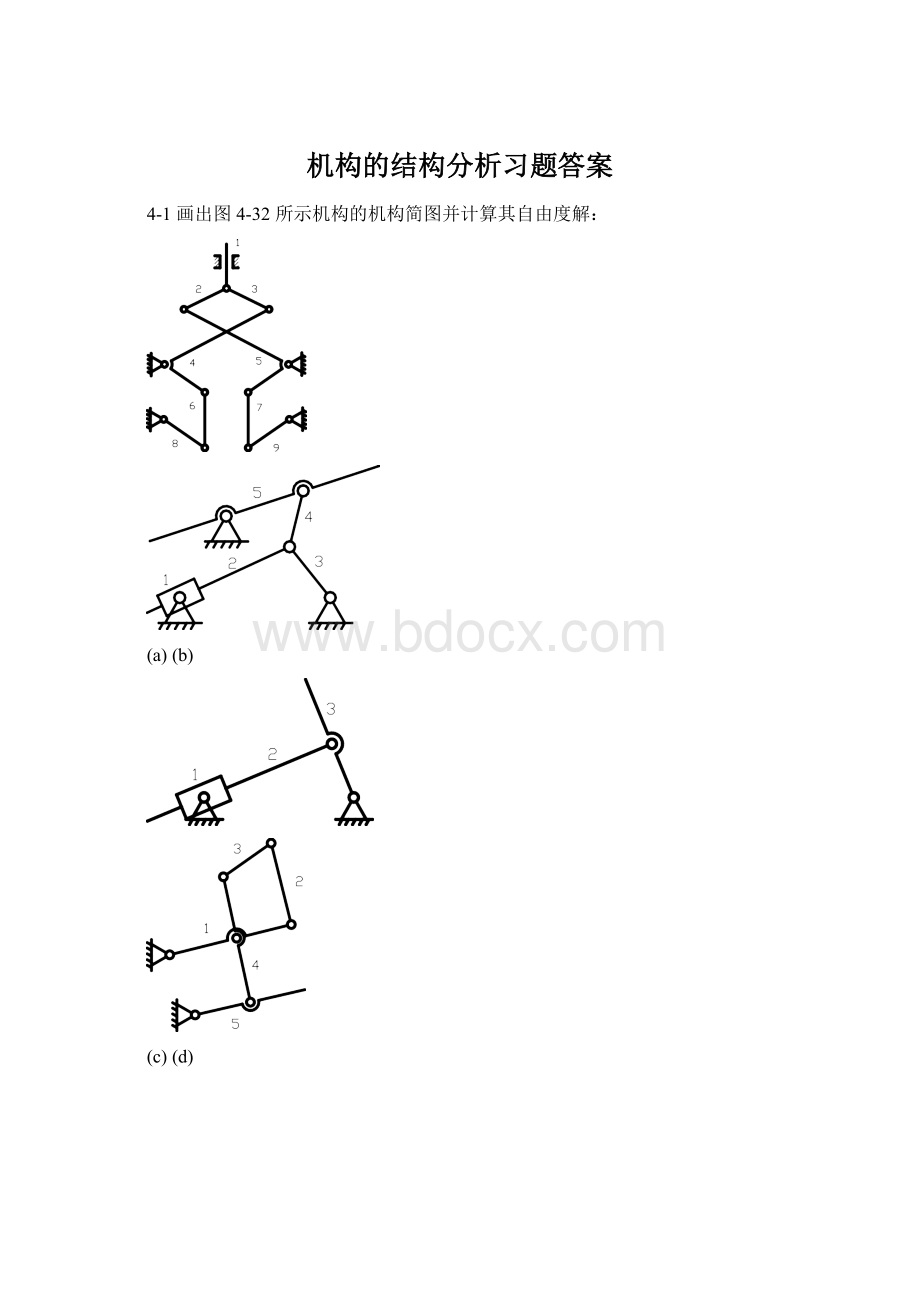
=2,F=3n-2PL-PH=1
(p)
n=12,PL=17,PH
=0,F=3n-2PL-PH=2
(q)
(r)
n=3,PL=3,PH
=2,F=3n-2PL-PH=1
4-2图4-33所示为一简易冲床的初拟设计方案。
设计者的意图是通过齿轮1带动凸轮2
旋转后,经过摆杆3带动导杆4来实现冲头上下冲压的动作。
试分析此方案有无结构组成原理上的错误。
若有,应如何修改。
图4-33题4-2图
解:
该机构运动简图为题4-2-1(a)图。
自由度
F=3n-(2p1+ph)=3⨯3-(2⨯4+1)=0
该简易机床设计方案的机构不能运动。
修改措施:
(1)在构件3,4之间加一连杆及一个转动副,如题4-2-1(b)所示;
(2)在构件3,4之间加一滑块及一个移动副,如题4-2-1(c)所示;
(3)
在构件3,4之间加一局部自由度滚子及一个平面高副,如题4-2-1(d)所示;
4
题图4-2-1
4-3试绘出图4-34所示偏心油泵机构的运动简图(其各部分尺寸由图上量取)。
该油泵的偏心轮1绕固定轴心转动,外环2上的叶片a在可绕轴心C转动的圆柱3中滑动。
当偏心轮1按图示方向连续回转时,可将右侧输入的油液向左侧泵出。
图4-34题4-3图
偏心油泵机构的运动简图如下图所示:
B
题图4-3-1
4-4
试计算图4-35所示齿轮一连杆组合机构的自由度。
C
AD
图4-35题4-4图解:
题4-4(a)图A处为复合铰链,自由度为:
F=3n-(2p1+ph-p'
)-F'
=3⨯4-(2⨯5+1-0)=1
题4-4(b)图B、C、D处为复合铰链,自由度为:
F=3n-(2p1+ph-p'
=3⨯6-(2⨯7+3-0)=1
4-5试计算图4-36所示机构的自由度,若含有复合铰链、局部自由度或虚约束,要逐一指出。
图4-36题4-5图
如题4-5-1图所示
(a)n=8,pL=11,pH
个局部自由度。
(b)n=7,pL=10,pH
虚约束和局部自由度。
(c)n=7,pL=10,pH
C、D点处为复合铰链。
=1,F=3n-2pL-pH
=0,F=3n-2pL-pH
=3⨯8-2⨯11-1⨯1=1,图中存在一
=3⨯7-2⨯10=1,图中无复合铰链、
=3⨯7-2⨯10=1,图中存在虚约束,
(d)n=7,pL=9,pH
=2,F=3n-2pL-pH
=3⨯7-2⨯9-1⨯2=1,图中存在一
个虚约束、一个局部自由度和一个复合铰链。
题图4-5-1
4-6图4-37所示的对称八杆机构中,已知导路EG⊥FH,构件1、2、3和4的长度相等,试计算该机构的自由度。
F
B6
E
12
A7G
543C
8D
图4-37题4-6图
构件1、2、3和4的长度相等,因此在构件5、6、7和8中,除原动件外,在计算自由度时还应从其余三个构件中去掉一个。
这是因为连接点和被连接点的轨迹相重合而引入一个虚约束。
例如,假设构件5为原动件,则应从构件6、7或8中去掉任意一个。
不妨假设去掉构件8,由于构件8上各点运动轨迹均为直线,而构件3与4组成转动副D,其运动轨迹也是直线,且和构件8的运动轨迹重合,所以在D处形成一个虚约束。
这样,该机构
自由度则为F=3n-(2p1+ph-p'
)=3⨯7-(2⨯10+0)=1。
4-7在图4-38所示的机构中,在铰链C、B、D处,被连接的两构件上联接点的轨迹都是重合的。
能说该机构有三个虚约束吗?
为什么?
y3
2
1D
54
Ax
图4-38题4-7图
答:
不能。
因为在铰链C,B,D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
4-8图4-39所示直线运动机构,已知AB=AC=AO。
试证明铰链C因轨迹重合而产生虚约束。
将铰链C改为高副之后,计算此机构的自由度。
图4-39题4-8图
齿轮2和齿轮4的相对运动可以看成是一对节圆之间的纯滚动,所以图中B点即为他们的瞬心(绝对瞬心)。
构件2在C点的速度vc2垂直于CB,由已知几何条件可知,∆OCB
为直角三角形,所以vc2平行于OC,所以构件2上的C点的轨迹始终在过O点的铅垂线上
(也即OC始终为铅垂线)。
而构件3上的C点轨迹也始终在OC线上。
如用铰链把两构件在C点铰接,则带来一个虚约束,也就是说铰链C相当于一个高副。
若将铰链C改为高副
之后,机构的自由度为F=3n-(2p1+ph-p'
)=3⨯3-(2⨯3+2)=1
4-9计算图4-40所示的刨床机构的自由度,若以构件1为原动件,则机构为几级机构?
若以构件4为原动件,则机构为几级机构?
(1)计算机构的自由度
图4-40题4-9图
在图示的机构中,机构的活动构件数为5,低副数为7,高副数为0,则该机构自由度为F=3n-(2p1+ph-p'
)=3⨯5-(2⨯7+0)=1。
(2)机构结构分析
若以构件1为原动件,机构只能拆分出一个Ⅲ级杆组,所以机构属于Ⅲ级机构。
若以构件4为原动件,机构能拆分出两个Ⅱ级杆组1-2、3-5,所以机构属于Ⅱ级机构。
4-10计算图4-41所示机构的自由度,并判断该机构运动是否确定。
然后将机构中的高副化为低副,并确定机构所含杆组的数目和级别及机构的级别。
机构中的原动件用箭头表示。
图4-41题4-10图
在题4-10图所示的机构中,B处滚子为局部自由度,对整个机构的运动无影响。
所以机构活动构件数为3,低副数为3,高副数为2,则该机构自由度为
F=3n-(2pl+ph)=3⨯3-(2⨯3+2)=1
机构自由度数等于原动件数(因机构中只标出一个原动件),因此该机构具有确定运动。
(2)高副低代
该机构含有两个高副,低代后需引入两个构件和四个低副,高副接触处的摆杆的曲率中心在无穷远处,引入构件和摆杆以移动副相联。
替代后的低副机构如题4-10-1图所示。
题图4-10-1
(3)机构结构分析
机构拆分从远离原动件的构件开始,并先从Ⅱ级杆组开始。
最后拆分结果为2个杆组:
构件5和4及一个转动副和两个移动副组成PRP型Ⅱ级杆组;
构件3和2及两个转动副和一个移动副组成的RPR型Ⅱ级杆组。
该机构拆分的最高级别的杆组为Ⅱ级,所以机构的级别为Ⅱ级。
4-11计算图4-42所示机构的自由度,并判断该机构运动是否确定。
然后将机构中的高副化为低副,并确定机构所含杆组的数目和级别,以及机构的级别。
机构中的原动件用箭头表示。
图4-42题4-11图
在题4-11图所示的机构中,F处为三个构件形成的复合铰链,G处的滚子为局部自由度,对整个机构的运动无影响。
通过以上分析可知,机构活动构件数为7,低副数为9,高副数为2,则该机构自由度为
F=3n-(2pl+ph)=3⨯7-(2⨯9+2)=1
题4-11-1图
该机构含有两个高副,低代后需引入两个构件和四个低副,在B处为点接触,所以构件3的曲率中心就在B点,替代后的低副机构如题4-11-1图所示。
最后拆分结果为3个杆组:
构件8和9及转动副F、J和移动副组成RRP型Ⅱ级杆组;
构件4、5、6和7及转动副C、E、F、G、K和H组成Ⅲ级杆组;
构件2和3,以及转动副B,D和移动副组成RRP型Ⅱ级杆组。
该机构拆分的最高级别的杆组为Ⅲ级,所以机构的级别为Ⅲ级。
4-12图4-43所示为一制动机构。
刹车时操作杆1向右拉,通过出构件2、3、4、5、6
使两闸瓦刹停车轮。
试计算机构的自由度,并就刹车过程说明机构自由度的变化请况。
E3C
I
6541
H
1
JG
2BA
7
D
图4-43题4-12图
(1)未刹车时,刹车机构的自由度为:
=3⨯6-(2⨯8+0-0)-0=2
(2)闸瓦G,J之一刹紧车轮时,刹车机构的自由度为:
=3⨯5-(2⨯7+0-0)-0=1
(3)闸瓦G,J同时刹紧车轮时,刹车机构的自由度为:
lh
F=3n-(2p+p-p'
)-F'
=3⨯4-2⨯6=0
4-13
试计算图4-44所示凸轮-连杆组合机构的自由度。
图4-44题4-13图
经分析知该机构共有5个活动构件,6个低副(注意移动副F与F′,E与E′均只算作一个移动副),2个高副;
因有两个滚子2,4,所以有两个局部自由度(去掉),没有虚约
束,故机构的自由度为F=3n-2pL-pH=3⨯5-2⨯6-2=1
如将D处结构改为如题图4-13-1所示形式,即仅由两个移动副组成。
注意,此时在该处将带来一个虚约束。
因为构件3,6和构件5,6均组成移动副,均要限制构件6在图纸平面内转动,这两者是重复的,故其中有一个为虚约束。
经分析知这时机构的活动构件数为4,
低副数为5,高副数和局部自由度数均为2,虚约束数为1,故机构的自由度为
F=3n-2pL-pH=3⨯4-2⨯5-2+1=1
题图4-13-1
上述两种结构的机构虽然自由度均为一,但在性能上却各有千秋:
前者的结构较复杂,但没有虚约束,在运动中不易产生卡涩现象;
后者则相反,由于有一个虚约束,假如不能保证在运动过程中构件3、5始终垂直,在运动中就会出现卡涩甚至卡死现象,故其对制造精度要求较高。
4-14试计算图4-45所示机构的自由度。
图4-45题4-14图
解:
图(a)所示机构,活动件数n=5,低副数PL=7,没有高副、虚约束和局部自由度。
故该机构的自由度为F=3n-2pL-pH=3⨯5-2⨯7-0=1
图(b)所示机构,重复结构部分GC、GH、FG三杆为多余构件,带入5个低副,故有一个虚约束,计算自由度时将该部分去掉,那么,活动件数n=8,低副数PL=11,高副数PH=1,
该机构的自由度为F=3n-2pL-pH=3⨯8-2⨯11-1=1
4-15试计算图4-46所示机构的自由度。
图4-46题4-15图
图(a)中活动件数n=4,低副数PL=6,高副数PH=0,存在一个虚约束,无局部自由
度。
则该机构的自由度为
F=3n-2pL-pH=3⨯4-(2⨯6-1)-0=1
图(b)中活动件数n=6,低副数PL=8,高副数PH=1,则该机构的自由度为
F=3n-2pL-pH=3⨯6-2⨯8-1=1
4-16图4-47所示为牛头刨床的一个机构设计方案简图。
设计者的意图是动力由曲柄1
输入,通过滑块2使摆动导杆3作往复摆动,并带动滑枕4往复移动以达到刨削的目的。
试分析该方案有无结构组成原理上的错误(需说明理由)。
若有请提出修改方案。
A54C
3
1B
图4-47题4-16图
由题4-16图可知,活动构件n=4,低副数P=6,机构无高副,则该机构自由度为
F=3n-(2Pl+Ph)=3⨯4-(2⨯6+0)=0,计算结果表明该牛头刨床机构的初拟设计方案无自由度,机构根本就不能动,蜕变为一结构件。
为了使机构能运动,需增加一个自由度,有两种方案:
添加一个构件和一个低副,如图
4-16-1(a)和(b)所示;
题图4-16-1
4-17计算图4-48所示的齿轮连杆组合机构的自由度。
5
G
5E
1C
A3
D6
图4-48题4-17图
本题涉及的机构属于含有齿轮副的机构,齿轮副根据两轮相对位置的关系,有时只提供一个约束,有时提供两个约束(相当于一个低副)。
(1)如图(a)所示的齿轮连杆机构中,齿轮4和齿轮5的回转中心都在铰接在构件
1上,两轮的相对位置被约束,齿轮4和齿条3的相对位置被构件3和2形成的移动副约束,所以两对齿轮啮合处都是只有一侧齿廓接触(有侧隙安装)。
又因无论有几对轮齿进入啮合,各对轮齿的公法线是重合的(即为基圆的内共切线的某一条)。
因此D、E处只提供一个约束。
另外,须注意的是机构在A、B两处为复合铰链。
通过以上分析可知,机构活动构件数
n=5,低副数Pl=6,高副数Ph=2,则该机构自由度为
F=3n-(2pl+ph)=3⨯5-(2⨯6+2)=1
(2)如图(b)所示的齿轮连杆机构中,齿轮3和齿条6的相对位置未被约束(是靠
重力保持的),齿轮4和齿轮3的相对位置也是通过重力来保持的,所以两对齿轮啮合处都是两侧齿廓接触(无侧隙)。
又因两侧齿廓接触处的公法线为基圆的两条内共切线,所以公法线不重合。
因此D、G处各提供两个约束。
通过以上分析可知,机构活动构件数n=5,低
副数Pl=5,高副数Ph=4,则该机构自由度为
F=3n-(2pl+ph)=3⨯5-(2⨯5+4)=1
4-18试比较如题4-49图所示(a)、(b)、(c)、(d)4个机构是否相同,或哪几个是相同的?
为什么?
图4-49题4-18图
图示(a),(b),(c),(d)4个机构是相同机构。
因为4个机构中相邻构件组成的运动副类型相同,且转动副位置相同.相对机架移动副导路方位一致。
4-19图4-50所示平底凸轮机构中构件1为主动件.试拆分该机构,并说明该机构的级
别。
图4-50题4-19图
机构中含有高副,拆分前应先用高副低代的方法将其变为低副机构,然后按拆的步骤对机构进行拆分。
机构拆分结果图4-19-1所示。
Ⅱ级组:
构件2、4。
因为只有Ⅱ级组,所以本机构是Ⅱ级机构。
题图4-19-1
4-20在图4-51图所示的机构中,分别取构件1和构件7为主动件时,机构的拆分结果是否相同?
8
图4-51题4-20图
当构件1为主动件时,机构拆分结果见题4-20-1(a)所示。
构件8、9;
Ⅱ级组:
构件6、7;
构件4、5;
构件2、3。
因为各杆组都是Ⅱ级组.所以取构件1为主动件时,该机构是Ⅱ级机构。
当构件7为主动件时,机构拆分结果见题4-20-1(b)所示。
Ⅲ级组:
构件1、2、3、4;
Ⅱ级组:
构件5、6。
因各杆组中的最高级别为Ⅲ级组,所以取构件7为主动件时,该机构是Ⅲ组机构。
分别取构件1和构件7为主动件时,机构的拆分结果是不同的,机构级别也是不同的。
+
原机构=
++
10
原机构=+
410
(b)题图4-20-1
4-21试确定题图4-52所示平面高副机构的级别。
图4-52题4-21图
具体的解题步骤如下。
(1)先除去机构中的局部自由度和虚约束,再计算机构的自由度。
由n=7,PL=9,PH=2,得
以构件1为原动件。
F=3n-2pL-pH=3⨯7-2⨯9-2=1
(2)进行高副低代,画出其瞬时代替机构,得到如图4-21-1(a)所示的平面低副机构。
(3)进行结构分析。
先试拆Ⅱ级杆组,拆分的结果如图4-21-1(b)所示。
(4)确定机构的级别。
由于拆出的最高级别的杆组是Ⅱ级组,故此机构为Ⅱ级机构。
A
原机构=++
题图4-21-1
4-22
计算图4-53所示机构的自由度,并确定机构的级别。
图4-53题4-22图
该机构无虚约束和局部自由度.由n=5,PL=7,得自由度为
F=3n-2pL-pH=3⨯5-2⨯7=1
机构图为题图4-22-1所示,构件5为原动件,距离构件5最远与其不直接相连的构件2、
3可以组成Ⅱ级杆组,剩下的构件4和构件6也可组成Ⅱ级杆组,最后剩下构件5与机架1
组成I级机构。
该机构由I级机构和两个Ⅱ级杆组所组成,因而为Ⅱ级机构。
FG6
B3CB3
2A42
C++D5
E4
D5E
题图4-22-1
4-23图4-54所示为压缩机的机构运动简图,试拆杆组,判断机构的级别。
若将构件EG
改为原动件,再拆杆组和判断机构级别。
图4-54题4-23图
从距原动件AB最远的构件开始,该机构可拆成三个II级基本杆组,如题图4-23-1
(a),可知该机构为II级机构。
若改选EG构件为原动件,可拆出一个II级杆组荆1—个III级杆组,如图4-23-1(b),此时成了III级机构。
原动件和机架构成的杆组为I级杆纽。
原
机=+
构A
+E+
原机构=
(b)题图4-23-1
4-24对于图4-55所示的机构:
(1)求机构自由度(若有复合铰链、局部自由度、虚约束.应在图上指出)。
(2)将其中的高副化为低副、画出高副低代后的机构示意图。
(3)若机构原动件取为与机架组成转动副的连架杆(具体哪个构件自定),试说明该机构从动件系统由哪些杆组组成,杆组的级别及机构的级别如何?
B齿条3D2
7齿轮4
6
AH
齿条5E
图4-55题4-24图
(1)F=3n-(2pL+pH-P'
)-F'
=3⨯9-(2⨯11+3-0)-1=1
图中H处为局部自由度,B、C处均为复合铰链;
齿条3及其运动副形成虚约束。
(2)高副低代后的机构示意图如题图4-24-1(a)所示。
(3)拆杆组如题图4-24-1(b)所示。
取连架杆1为原动件,拆杆分2,3杆组;
7,8杆组;
12,6杆组;
4,11杆组及10,5杆组、5个基本什组全为Ⅱ级杆组。
机构的级别为Ⅱ级机构。
B25D
14C
73
12611
AH
FE
G8
5D
BB
7C
11
12
F6
G8H
(b)题图4-24-1
 升级会员
升级会员 