飞行管理问题lpWord下载.docx
《飞行管理问题lpWord下载.docx》由会员分享,可在线阅读,更多相关《飞行管理问题lpWord下载.docx(7页珍藏版)》请在冰豆网上搜索。
不碰撞。
手段:
调整飞行方向角。
要求:
调整的幅度尽量小。
求解思路:
(1)找出不碰撞的条件。
(2)求调整幅度的极小值。
建立优化模型。
题目的条件
(1)飞机在正方形区域内水平飞行。
(2)飞机不碰撞的标准为二者距离大于8公里。
根据
(1)可将飞机飞行的空域视为二维平面xoy中的一个正方形区域,顶点为(0,0),(160,0),(160,160),(0,160)。
根据
(2)可将每架飞机视为一个以飞机坐标点为圆心、以4公里为半径的圆状物体。
每架飞机在空域中的状态由圆心的位置矢量和飞行速度矢量确定。
这样两架飞机是否碰撞就化为两圆在运行过程中是否相交的问题。
两圆是否相交只要讨论它们的相对运动即可。
2.模型假设
(1)飞机进入区域边缘时,立即作出计算,每架飞机按照计算后的指示立即作方向角改变;
(2)每架飞机在整个过程中至多改变一次方向;
(3)忽略飞机转向的影响(转弯半径和转弯时间的影响);
(4)新飞机进入空域时,已在空域内部飞行的飞机的飞行方向已调合适,不会碰撞;
(5)对每架飞机方向角的相同调整量的满意程度是一样的。
3.模型的建立
(1)圆状模型
由前面的分析将飞机作为圆状模型进行研究。
两圆不相交,则表明不会发生碰撞事故;
若两圆相交,则表明会发生碰撞事故。
为了研究两飞机相撞问题,采用相对速度作为研究对象,因为飞机是否相撞的关键是相对速度。
下图给出任意两架飞机间的关系。
图中符号含义如下:
i,j—第i、第j架飞机的圆心;
aij—第i架飞机与第j架飞机的碰撞角,是两圆的切线交角中指向圆的那个角的一半.;
vij—第i架飞机相对于第j架飞机的相对飞行速度;
lij—第i架飞机与第j架飞机的圆心距;
ij—第i架飞机对于第j架飞机的相对速度与两架飞机圆心连线的交角。
规定以第i架飞机为原点,i→j连线从i指向j为正方向,逆时针旋转为正角,顺时针旋转为负角;
AB、CD为两圆的公切线,mi//AB,nj//CD
另外再引入记号:
i—第i架飞机的飞行方向与直角坐标xoy中x轴正向的夹角(转角);
xi—第i架飞机在坐标xoy中的位置矢量;
vi—第i架飞机的飞行速度矢量。
由图得到两飞机不相撞(两圆不相交)的充要条件是|ij|>
aij.当|ij|≤aij时,则通过调整两飞机的方向角i与i,使飞机不相撞。
(2)决策目标
题目要求飞机飞行方向角调整的幅度尽量小,这个尽量小是针对每架飞机而言,同时也要求整体满意程度(即对管理层而言,应使每架飞机的调整都尽量的小).
构造目标函数时,可以认为若对方向角调整量最大的飞机而言,其调整量可满意,则由假设(5)对其余飞机调整量均可满意。
即要求每架飞机的调整量都小于某个数故可取目标函数为,求其最小值min
(3)由圆状模型导出的方程
飞行方向角改变量Δi、Δj
相对飞行速度方向角ij的改变量Δij
讨论Δij与Δi、Δj的关系。
对飞行速度矢量vi,由题目条件有,
|vi|=|vi|=800=A(km)
飞行方向角为i
用复数表示vi得。
记第i,j两架飞机飞行方向改变前的速度、两架飞机的相对速度分别为:
飞行方向改变后的速度、相对速度分别为:
则相对飞行速度方向角的改变量Δij由
得出。
故
定理对第i,j架飞机,其相对速度方向的改变量Δij等于两飞机飞行方向角改变量的平均值。
则调整方向后两飞机不相撞的充要条件是:
|ij+Δij|>
aij.
总结以上结果得如下优化模型
minθ
(1)
s.t.|ij+Δij|>
aij.,Δij=(Δi+Δj)
(2)
|Δi|≤θ,i=1…6,(3)
|Δi|≤30°
i=1…6,(4)
0°
≤i≤30°
(5)
(4)线性规划模型。
将上述优化模型进行化简,可转化为线性规划模型。
|ij+Δij|>
aij可化为:
ij+Δij>
aij当ij>
0
ij+Δij<
-aij当ij<
自变量Δi可正可负,引入新的变量
Δi10,Δi20,使ΔI=Δi1-Δi2
则|Δi|≤θ,|Δi|≤30°
可化为:
Δi1-Δi2≤θ
Δi1-Δi2-θ
Δi1-Δi2≤30°
Δi1-Δi2-30°
这样,优化模型
(1)~(5)就转化为如下线性规划模型
minθ(6)
s.t.
Δi1-Δi2+Δj1-Δj2>
2aij-2ij当ij>
0(7)
Δi1-Δi2+Δj1-Δj2<
2ij-2aij当ij<
0(8)
Δi1-Δi2≤θi=1…6,(9)
Δi1-Δi2-θi=1…6,(10)
Δi1-Δi2≤30°
i=1…6,(11)
Δi1-Δi2-30°
i=1…6,(12)
θ30°
(13)
Δi10°
Δi20°
θ0°
i=1…6,(14)
其中,可由题中已知的参数计算得到
4.模型求解
(1)记录各飞机状态(位置矢量、速度矢量);
(2)计算任两架飞机间的参数,;
(3)利用计算线性规划的软件求解(6)~(14)。
如Mathematica、Matlab、LINDO
5结果检验
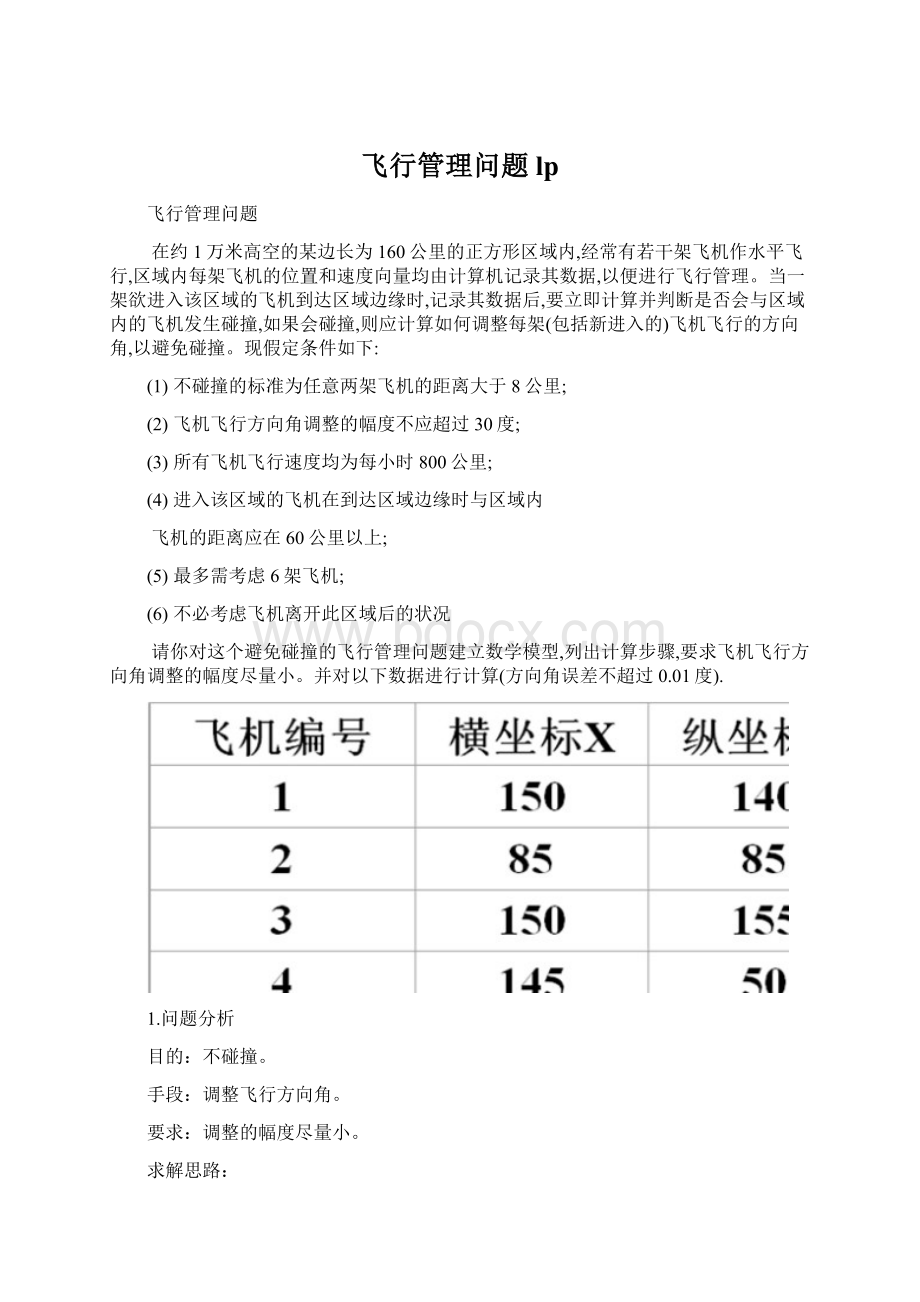
对题目所给实例进行计算得如下调整方案
Δ1=0,Δ2=0,Δ3=1.814732
Δ4=-743155Δ5=0,Δ6=1.814732
各飞行方向角按此方案调整后,系统各架飞机均满足|ij|>
aij(即不会相撞)。
其中有些飞机对有|ij|-aij<
0.01,(0.01是计算精度)。
如果希望|ij|>
aij+0.01,只须将模型中的ai用ai+0.01°
代替即可。
将调整后各量再代入模型进行计算得minθ=0
即此时无需再调整。
经模拟程序运行可观察动态结果是正确的。
6.模型评价与推广
(1)此模型采用圆状模型分析碰撞问题是合理的,同时采用相对速度作为判断标准,即体现了碰撞的本质(相对运动),又简化了模型的计算。
(2)建模中用了适当的简化,将一个复杂的非线性规划问题简化为线性规划问题。
既求到合理的解,又提高了运算速度。
这对于解决高速运行的飞机碰撞问题是十分重要的。
此模型对题目所提供的例子计算得出的结果是令人满意的。
简化模型中忽略了ij=0(即两架飞机迎面飞行)的情况。
ij=0时,可使用约束条件(7)式或(8)式求出最优解。
比较此两组解可得最优解。
(4)模型中的约束条件数为+4n=n(n+7)/2
(n是飞机数),n增大时,约束条件数是n的二次函数,计算量增加不大。
 升级会员
升级会员 