自动控制原理实验汇总Word文档格式.docx
《自动控制原理实验汇总Word文档格式.docx》由会员分享,可在线阅读,更多相关《自动控制原理实验汇总Word文档格式.docx(37页珍藏版)》请在冰豆网上搜索。
=K(TdS+1)
取参考值R=100K,Ra=100K,C=1uF
图8-3惯性环节
(3)积分环节
g(s)殳ECS
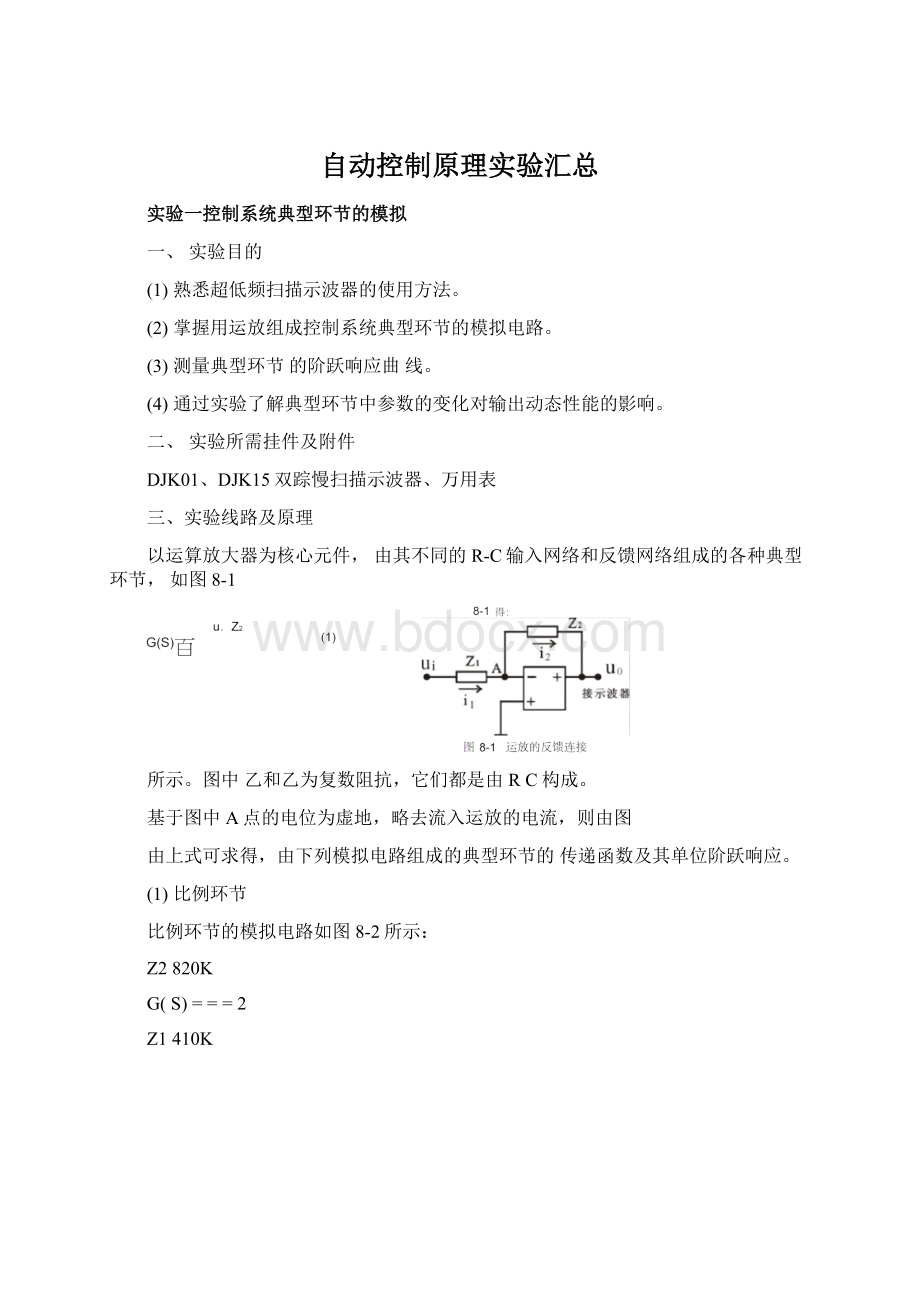
Z1R
RCS
丄⑶
TS
式中积分时间常数T=RC取参考值R=200KC=1uF
图8-5比例微分环节
⑸比例积分环节,其接线图单位阶跃响应如图8-6所示。
Z2R2+1/CS(R2CS+1)
=Z1=R1=R1CS
R21R21
R1RCSRJR2CS7
=K(+T2S)⑸
式中
K=,T2=R2C
参考值Ri=100KR2=200KC=0.1uF
(6)振荡环节,其原理框图、接线图及单位阶跃响应波形分别如图8-7、8-8所示。
图8-8为振荡环节的模拟线路图,它是由惯性环节,积分环节和一个反号器组成。
根据它们的传递函数,可以画出图8-7所示的方框图,图中:
G(S)Ej其中
Ti
R2/R1,1R2C1,2R3C2由图(8)可求得开环传递函数为
欲使图8-8为振荡环节,须调整参数
K和T1,使0<
<
1,呈欠阻尼状态。
即环节的单位阶跃响
应呈振荡衰减形式。
Ui=iv
四、实验内容
⑴分别画出比例、惯性、积分、微分和振荡环节的模拟电路图。
(2)按下列各典型环节的传递函数,调节相应的模拟电路的参数,观察并记录其单位阶跃响应波形。
i(S)=1和G(S)=2
1比例环节G
2积分环节G
3比例微分环节G
4惯性环节G
⑤比例积分环节
⑥震汤环节
五、实验报告
i(S)=1/S和Ga(S)=1/(0.5S)
i(S)=2+S和G(S)=1+2Si(S)=1/(S+1)和G(S)=1/(0.5S+1)
PI)G(S)=1+1/S和G(S)=2(1+1/2S)
2
TiS1SK
10
0.iS2Sio
实验二一阶系统的时域响应及参数测定
、实验目的
(1)观察一阶系统在单位阶跃和斜坡输入信号作用下的瞬态响应。
⑵根据一阶系统的单位阶跃响应曲线确定系统的时间常数。
、实验所需挂件及附件
序号
型号
备注
DJK01电源控制屏
该控制屏包含“三相电源输出”等几个模块。
DJK15控制理论实验
或DJK16控制理论实验
3
双踪慢扫描示波器
或数子示波器
4
万用表
io=ii-i2
图8-8为一阶系统的模拟电路图。
由该图可知
即虫-坐=-壬
R0R,1/CS
Au_u0
R0=-1/CS
其中T=RDG由图8-10得:
图8-9一阶系统模拟电路图
U°
(S)1
Uj(S)TS1令Ui(t)1(t),即Ui(S)
Uo(S)
S(TS1)
取拉氏反变换,得
Uo(t)
-1t
1-eT
1/S,则系统的输出为
11
S-S1/T
(1)
(T)=1©
1=0.632。
这表示当C(t)上
T,根据这个原理,由图8-11可测得
1,因而该系统的跟踪阶跃输入的稳态
根据上式,画出图8-10所示的方框图,
图8-11为一阶系统的单位阶跃响应曲线,当t=T时,C
升到稳定值的63.2%时,对应的时间就是一阶系统的时间常数一阶系统的时间常数T。
由上式
(1)可知,系统的稳态值为误差?
ss=0。
图8-11为一阶系统的单位阶跃响应曲线
当Ui(s)1/s则
11/T1TT
Uo(s)222
S2(TS1)S2(S1/T)S2SS1/T
所以Uo(t)tTTeT这表明一阶系统能跟踪斜坡信号输入,但有稳态误差存在,其误差的大小为系统的时间常数To
四、思考题
(1)一阶系统为什么对阶跃输入的稳态误差为零,而对单位斜坡输入的稳态误差为T?
(2)一阶系统的单位斜坡响应能否由其单位阶跃响应求得?
试说明之。
五、实验方法
(1)根据图8-9所示的模拟电路,调整F0和C的值,使时间常数T=1S和T=0.1S。
(2)ui(t)=1V时,观察并记录一阶系统的时间常数T分别为1S和0.1S时的单位阶跃响应曲线
并标注时间坐标轴。
(3)当ui(t)=t时,观察并记录一阶系统时间常数T为1S和0.1S时的响应曲线,其中斜坡信号
可以通过实验箱中的三角波信号获得,或者把单位阶跃信号通过一个积分器获得。
六、实验报告
(1)根据实验,画出一阶系统的时间常数T=1S时的单位阶跃响应曲线,并由实测的曲线求得时
7
r
iui=iv
间常数To
(2)观察并记录一阶系统的斜坡响应曲线,并由图确定跟踪误差ess,这一误差值与由终值定理
求得的值是否相等?
分析产生误差的原因。
实验三二阶系统的瞬态响应分析
接示波番
序号1
双踪慢扫描示波器—
(1)熟悉二阶模拟系统的组成。
(2)研究二阶系统分别工作在=1,0<
1,和1三种状态下的单位阶跃响应。
⑶增益K对二阶系统单位阶跃响应的超调量p、峰值时间tp和调整时间ts。
(4)观测系统在不同K值时跟踪斜坡输入的稳态误差。
二、实验所需挂件及附件
图8-13二阶系统原理框图
图8-12二阶系统的模拟电路
图8-12为二阶系统的模拟电路图,它是由惯性环节、积分环节和反号器组成。
图8-13为图8-12的原理方框图,图中K=R/R1,T1=F2G,E=F3C2。
由图8-13求得二阶系统的闭环传递函数为:
K/T1T2
Ui(S)
T1T2S2T2SK
S2T1SK/T1T2
而二阶系统标准传递函数为
n
G(S)=
~22~"
S+2nS+n
对比式⑴和式⑵,得
nKT1T2,T24T1K
若令T10.2S,T20.5S,贝Vn10K,0.625K
过阻尼(>
1)、临界阻尼(
=1)和欠阻尼(<
1)三种情况下的阶跃响应曲线。
(1)当K>
0.625,0
调节开环增益K值,不仅能改变系统无阻尼自然振荡频率3n和阻尼比的值,而且还可以得到
1,系统处在欠阻尼状态,它的单位阶跃响应表达式为:
112
Uo(t)12entsin(dttg1)(3)
式中dn.12
图8-14为二阶系统在欠阻尼状态下的单位阶跃响应曲线。
(2)当K=0.625时,=1,系统处在临界阻尼状态,它的单位阶跃响应表达式为:
nt
Uo(t)1(1nt)en
图8-15为二阶系统工作临界阻尼时的单位响应曲线。
(3)当K0.625时,1,系统工作在过阻尼状态。
它的单位阶跃响应曲线和临界阻尼时的单位阶跃响应一样为单调的指数上升曲线,但后者的上升速度比前者更缓慢。
四、思考题
(1)如果阶跃输入信号的幅值过大,会在实验中产生什么后果?
(2)在电子模拟系统中,如何实现负反馈和单位负反馈?
(3)为什么本实验的模拟系统中要用三只运算放大器?
五、实验方法
(1)
0.5S(0.2S1)
根据图8-12,调节相应的参数,使系统的开环传递函数为:
(2)令ui(t)=1V,在示波器上观察不同K(K=10,5,2,0.5)时的单位阶跃响应的波形,并由
实验求得相应的bp、tp和ts的值。
(3)调节开环增益K,使二阶系统的阻尼比=1/2=0.707,观察并记录此时的单位阶跃响应
波形和bp、tp和ts的值。
(4)用实验箱中的三角波或输入为单位正阶跃信号积分器的输出作为二阶系统的斜坡输入信号。
(5)观察并记录在不同K值时,系统跟踪斜坡信号时的稳态误差。
六、实验报告
(1)画出二阶系统在不同0直(10,5,2,0.5)下的4条瞬态响应曲线,并注明时间坐标轴。
(2)按图8-13所示的二阶系统,计算K=0.625,K=1和K=0.312三种情况下和3n值。
据此,
求得相应的动态性能指标bp、tp和ts,并与实验所得出的结果作一比较。
(3)写出本实验的心得与体会。
实验四三阶系统的瞬态响应及稳定性分析
一、实验目的
(1)熟悉三阶系统的模拟电路图。
⑵由实验证明开环增益K对三阶系统的动态性能及稳定性的影响。
⑶研究时间常数T对三阶系统稳定性的影响。
r或数子示波器
图8-16三阶系统原理框图
图8-16为三阶系统的方框图,它的模拟电路如图8-17所示,对应的闭环传递函数为:
(S)=K
Ui(S)=T3S(TiS+1)(T2S+1)+K
该系统的特征方程为:
T1T2T3S&
T3(T1+T2)SZT3S+K=0
其中K=R/R1,T1=R3C1,T2=R4C2,T3=RsC3。
若令T1=0.2S,T2=0.1S,T3=0.5S,则上式改写为
S3+15S2+50S+100K=0
用劳斯稳定判据,求得该系统的临界稳定增益K=7.5。
这表示K>
7.5时,系统为不稳定;
K<
7.5
时,系统才能稳定运行;
K=7.5时,系统作等幅振荡。
除了开环增益K对系统的动态性能和稳定性有影响外,系统中任何一个时间常数的变化对系统
的稳定性都有影响,对此说明如下:
令系统的剪切频率为C,则在该频率时的开环频率特性的相位为:
(C)=-90-tg-1T1c—tg-1T2c相位裕量=180+(c)=90-tg-1T1c-tg-1T2c由上式可见,时间常数「和T2的增大都会使减小。
(1)为使系统能稳定地工作,开环增益应适当取小还是取大?
⑵系统中的小惯性环节和大惯性环节哪个对系统稳定性的影响大,为什么?
(3)试解释在三阶系统的实验中,输出为什么会出现削顶的等幅振荡?
⑷为什么图8-13和图8-16所示的二阶系统与三阶系统对阶跃输入信号的稳态误差都为零
⑸为什么在二阶系统和三阶系统的模拟电路中所用的运算放大器都为奇数?
T3SES1)(T2S1)
图8-16所示的三阶系统开环传递函数为:
⑴按K=10,Ti=0.2S,T2=0.05S,T3=0.5S的要求,调整图8-17中的相应参数。
(2)用慢扫描示波器观察并记录三阶系统单位阶跃响应曲线。
(3)令Ti=0.2S,T2=0.1S,T3=0.5S,用示波器观察并记录K分别为5、7.5和10三种情况下
的单位阶跃响应曲线。
(4)令K=10,Ti=0.2S,T3=0.5S,用示波器观察并记录T2分别为0.1S和0.5S时的单位阶跃响应曲线。
(1)作出K=57.5和10三种情况下的单位阶跃响应波形图,据此分析K的变化对系统动态性
能和稳定性的影响。
(2)作出K=10,T1=0.2S,T3=0.5S,T2分别为0.1S和0.5S时的单位阶跃响应波形图,并分析时间常数T2的变化对系统稳定性的影响。
实验五PID控制器的动态特性
(1)熟悉PI、PD和PID三种控制器的模拟电路。
(2)通过实验,深入了解PI、PD和PID三种控制器的阶跃响应特性和相关参数对它们性能的影
响。
PI、PD和PID三种控制器是工业控制系统中广泛应用的有源校正装置。
其中PD为超前校正装
置,它适用于稳态性能已满足要求,而动态性能较差的场合;
PI为滞后校正装置,它能改变系统的
稳态性能;
PID是一种滞后超前校正装置,它兼有PI和PD两者的优点。
(1)PD控制器pw陰即
图8-18为PD控制器的电路图,它的传递函数为:
G(s)=-Kp(TDS+1)
其中Kp=R/Ri,TD=RiCi
(2)PI控制器
图8-19为PI控制器的电路图,它的传递函数为:
R2C2S1
R1C2S
R
(1
Kp(1T^)
其中pR2/R,2R2C2
(3)PID控制器
图8-20为PID控制器的电路图,它的传递函数为:
(1S1)(2S1
2S
-Kp(1
T,STdS)
图8-20
其中1R1C1
R2C2
T1
R1C1
12
R1200K,C11uF,R2
100K,C210uF
⑴试说明PD和PI控制器各适用于什么场合?
它们各有什么优、缺点?
(2)试说明PID控制器的优点。
(3)为什么由实验得到的PD和PID输出波形与它们的理想波形有很大的不同?
(1)令Ur=1V,C=1uF,用慢扫描示波器分别测试R仁10K和20K时的PD控制器的输出波形(R>
不变为20K)。
(2)令Ur=1V,C=1uF,Ri=20K用示波器分别测试R2=10K和20K时的PI控制器的输出波形。
(3)令Ur=1V,用示波器测试PID控制器的输出波形。
(1)画出PDPI、和PID三种控制器的实验线路图,并注明具体的参数值。
(2)根据三种控制器的传递函数,画出它们在单位阶跃信号作用下的理论上的输出波形图。
(3)根据实验,画出三种控制器的单位阶跃响应曲线,并与由理论求得的输出波形作一分析比较。
(4)分析参数对三种控制器性能的影响。
实验六控制系统的动态校正
(1)要求学生根据书上习题的要求,自行设计一校正装置,并用本实验挂件构成的模拟系统进行实验和实际调试、使学生能认识到校正装置在系统中的重要性。
(2)掌握工程中常用的二阶系统和三阶系统的工程设计方法。
二、实验所需挂件及附件
当系统的开环增益满足其稳态性能的要求后,它的动态性能一般都不理想,甚至发生不稳定。
为此需在系统中串接一校正装置,既使系统的开环增益不变,又使系统的动态性能满足要求。
常用的设计方法有根轨迹法、频率法和工程设计法。
本实验要求用工程设计法对系统进行校正。
(1)二阶系统
图8-21为二阶系统的标准形式,它的开环传递函数为:
T(S)=
S2+2nS+
,把Wn=12T代入上式得
图8-22所示二阶系统的原理框图
当1.2时,二阶系统标准形式的闭环传递函数为:
式(5)就是二阶系统的最优闭环传递函数,理论证明,只要二阶系统的闭环传递函数如式(3)
所示的形式,则该系统的阻尼比=1/2=0.707,对阶跃响应的超调量bp只有4.3,调整时间ts为8Ts(?
=±
0.05),相位裕量=63。
(2)三阶系统
图8-24为三阶控制系统的模拟电路图,图8-25为其方框图。
Ti=R1C1,1=R2Ci,Ks=R4/R3,Ts=R1C2,Tsi=R5C3
由图8-25求得该系统的开环与闭环传递函数分别为
由理论证明,当4Ts,_
r8KsTs时,三阶系统具有下列理想的性能指标:
超调量bp=43,调整时间
ts=18Ts,相位裕量=36.8。
此时,式(7)可以改写为:
其中Ks'
=KsTi。
4TsS+1
3322
8Ts3S3+8Ts2S2+4TsS+1
显然,上式的性能指标比二阶系统要差,这主要是由三阶系统闭环传递函数的分子多项式引起的,为此,需在系统的输入端串接一个给定的滤波器,它的传递函数为:
于是系统的闭环传递函数为
在阶跃信号作用下,上述三阶系统具有下列的性能指标:
超调量bp=8
上升时间tr=7.6TS
调整时间ts=16.4TS
加入输入滤波器后系统的方框图为图
图8-27给定滤波器的模拟电路
(1)二阶系统与三阶系统的工程设计依据是什么?
(2)在三阶工程设计中,为什么要在系统的输入端串接一滤波器?
(3)按二阶系统和三阶系统的工程设计,系统对阶跃输入的稳态误差为什么都为零?
但对斜坡信号输入,为什么二阶系统有稳态误差,而三阶系统的稳态误差为零?
(1)按二阶系统的工程设计方法,设计下列系统的校正装置。
①对象由两个大惯性环节组成,如图8-28所示。
R⑼C?
C(3>
图8-29
③对象由一个积分环节和一个惯性环节组成,如图8-30所示。
图8-30
(2)按三阶系统工程设计方法,设计下列系统的校正装置。
图8-32
②对象由两个惯性环节组成,其方框图如图8-32所示。
(1)按实验内容的要求,确定各系统所引入校正装置的传递函数,并画出它们的电路图。
(2)画出各实验系统的电路图,并令输入r(t)=1V,测试系统的阶跃响应曲线。
(3)由实验所得的波形,确定系统的性能指标,并与二阶、三阶系统的理想性能指标作一比较。
(4)根据习题要求设计校正装置,并用本实验箱构成的系统进行验证,如果实测的性能指标达不到设计要求,应如何调试,并分析原因。
实验七典型环节频率特性的测试
(1)掌握用李沙育图形法,测量各典型环节的频率特性。
(2)根据所测得频率特性,作出伯德图,据此求得环节的传递函数。
「或数子示波器
对于稳定的线性定常系统或环节,当其输入端加入一正弦信号X(t)=XmSinet,它的稳态输出
是一与输入信号同频率的正弦信号,但其幅值和相位将随着输入信号频率3的变而变。
即输出信号
为:
(t)=mSin(3t+)=mG(je)Sin(3t+)G■Ym
其中Gj,(3)=argG(je)
Xm
只要改变输入信号x(t)的频率3,就可测得输出信号与输入信号的幅值比G(j3)和它们
的相位差(3)=argG(j3)。
不断改变x(t)的频率,就可测得被测环节(系统)的幅频特性G
(j3)和相频特性(3)。
本实验采用李沙育图形法,图8-33为测试的方框图。
图8-33典型环节的测试方框图
在表8-1中列出了超前与滞后时相位的计算公式和光点的转向。
表中2Yo为椭圆与Y轴交点之
计算公式
=Sin-12Yo/
(2Ym)=Sin-12X0/
(2Xm)
=180°
-Sir-12Yo/(2Ym)=Sin-12Xo/(2Xm)
■1
=Sin12Y0/(2Ym)=Sin-12Xo/(2Xm)
=180-Sin1
2Yo/(2Ym)
=180°
-Sin-1
2X0/(2Xm)
光占八、、转向
顺时针
逆时针
四、实验方法
(1)惯性环节的频率特性的测试
令G(S)=1/(0.5S+1),则其相应的模拟电路如图8-34所示。
测量时示波器的X轴停止扫描,
Y轴,如图
把扫频电源的正弦信号同时送到被测环节的输入端和示波器的X轴,被测环节的输出送到示波器的
•
jojhi由
被蘭坏节
d
11mUIK
X
测得在该输入信号频率下得相位值:
Sin
2X
图8-35相频特性测试的接线图
当扫频电源输出一个正弦信号,则在示波器的屏幕上呈现一个李沙育图形------椭圆。
据此,可
不断改变扫频电源输出信号的频率,就可得到一系列相应的相位值,列表记下不同3值时的X0
和Xm
测量时,输入信号的频率3要取得均匀,频率取值范围为15Hz—40KHN幅频特性的测试按图
8-36接线,测量时示波器的X轴停止扫描,在示波器(或万用表的交流电压档)分别读出输入和输
出信号的双倍幅值
 升级会员
升级会员 