PMAC PID调整方法.docx
《PMAC PID调整方法.docx》由会员分享,可在线阅读,更多相关《PMAC PID调整方法.docx(21页珍藏版)》请在冰豆网上搜索。
PMACPID调整方法
1设置M变量M118、M218、M318、M418
它们的地址的PMAC建议的地址。
看是否编码器反馈有问题。
如果等于1说明编码器计数有错误。
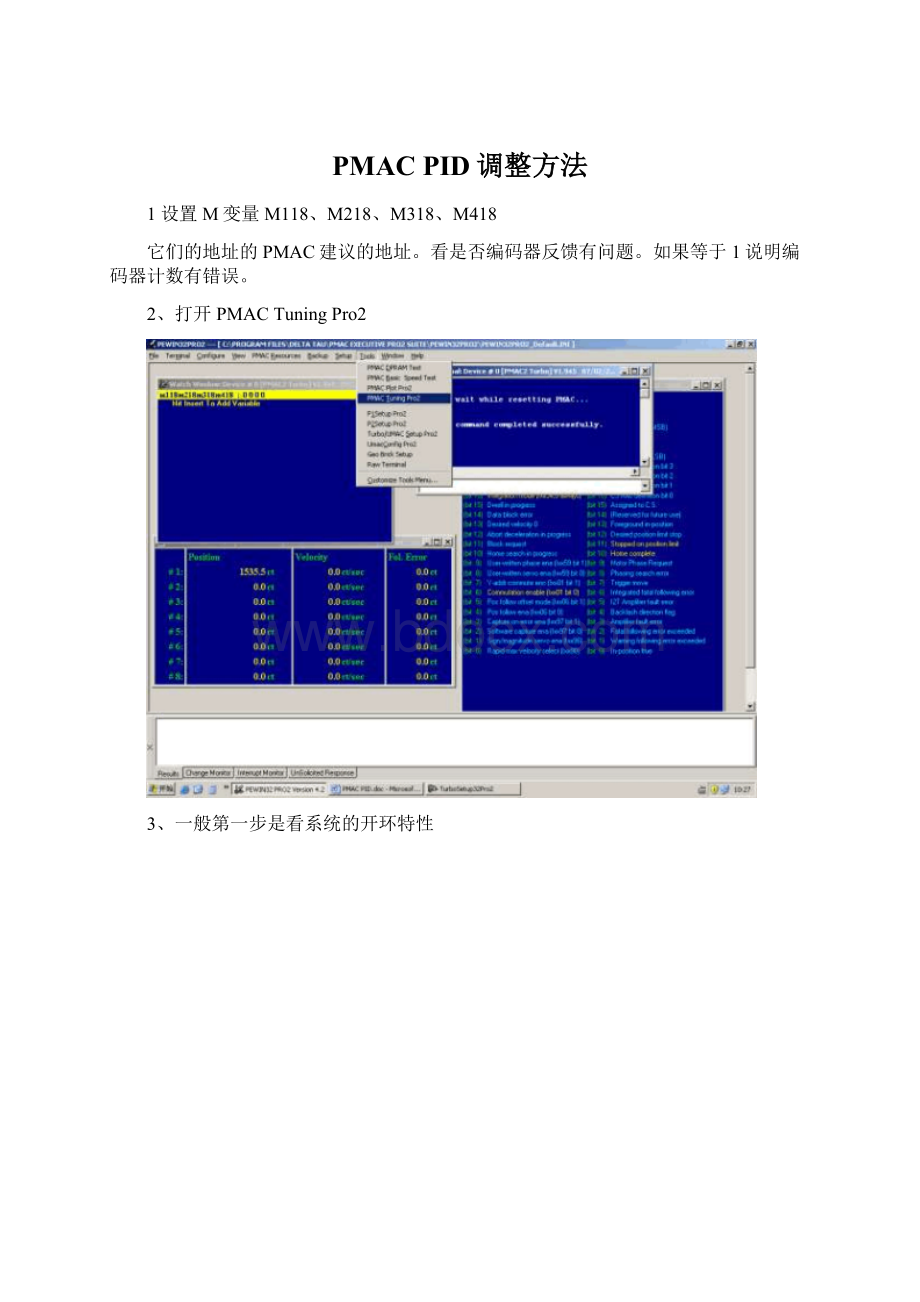
2、打开PMACTuningPro2
3、一般第一步是看系统的开环特性
看开环特性是否正确:
指令和反馈是否方向一致,
另外是观察系统的线性度,如果驱动器是力矩环,速度反馈最好是三角波,上图为力矩环。
如果是速度环,速度反馈应为方波。
总之要求反馈的线性度要好,不应该有其它频率波动成份。
开环特性正确后,开始调整稳态特性,用阶越响应。
比例明显过小
加大比例后。
再加大比例
微分有点大了,稳态特性有一定的频率波动。
适合减小微分
这样的阶越响应特性还不错。
但为保证系统的稳定,还要减小比例值,即系统的刚性。
减到原来的75%比较好。
这是比例或微分太大了的例子,电机很振!
下面来调整动态响应性能。
要说明的是“MoveSize”和“MoveTime”要接近系统的实际运行特性。
没有速度前馈时“FollowingError”大约有1240Cts。
加入速度前馈后。
一般Ixx32=Ixx31.
再细调速度前馈后的曲线。
跟踪误差进一步缩小。
加入加速度前馈前
比较好的加入加速度前馈后,这样的曲线说明系统存在摩擦。
我们还要加入摩擦前馈。
加入正确的摩擦前馈后,除了在系统加速度突变的三个点外的跟踪误差都在20CTS内。
实际的系统不会有这样的指令,也不应该有。
这就是比较好的动态响应曲线了!
这是另一台电机的开环特性,线性度要比上面的好。
这是另一台好一点的电机动态特性。
PMAC力矩方式PID调整口绝
阶越响应调反馈
反馈先调P和D
其它增益先置零
P是刚性D阻尼
刚性越强速越快
阻尼抑制超调量
刚性过强易振荡
阻尼过大噪声响
参数调整要细心
先小后大慢慢增
参数调整并不难
关键找寻故障源
性能克星有两种
机械共振与噪声
噪声过大查走线
尽量避免用低通
如果系统有共振
则需陷波来参与
倘若以上不奏效机械系统需改善
反馈调完调前馈二阶速度来助阵速度前馈不用调直接设为微分量加速前馈意明了惯量与之可等效惯量越大值越大参数范围可很宽摩擦前馈勿忽略补偿摩擦有一手最后在把积分加
下面的供您参考。
 升级会员
升级会员 