龙门刨床辅助电路设计.docx
《龙门刨床辅助电路设计.docx》由会员分享,可在线阅读,更多相关《龙门刨床辅助电路设计.docx(16页珍藏版)》请在冰豆网上搜索。
龙门刨床辅助电路设计
5辅助电路设计
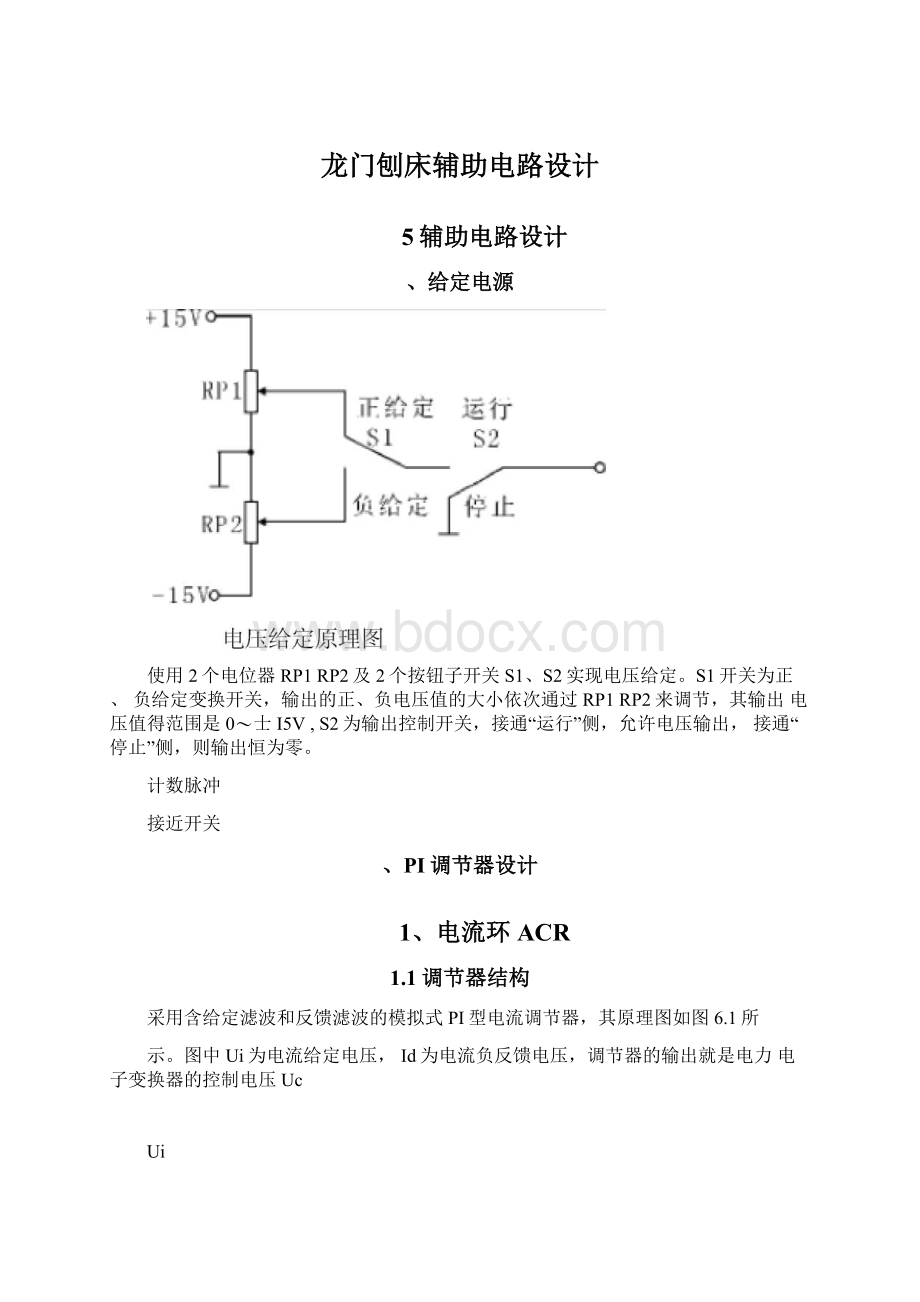
、给定电源
使用2个电位器RP1RP2及2个按钮子开关S1、S2实现电压给定。
S1开关为正、负给定变换开关,输出的正、负电压值的大小依次通过RP1RP2来调节,其输出电压值得范围是0〜士I5V,S2为输出控制开关,接通“运行”侧,允许电压输出,接通“停止”侧,则输出恒为零。
计数脉冲
接近开关
、PI调节器设计
1、电流环ACR
1.1调节器结构
采用含给定滤波和反馈滤波的模拟式PI型电流调节器,其原理图如图6.1所
示。
图中Ui为电流给定电压,Id为电流负反馈电压,调节器的输出就是电力电子变换器的控制电压Uc
Ui
O-
图6.1PI型电流调速器
1.2参数计算
要求系统实现稳态无静差,电流超调量i5%,空载起动到额定转速时的转速超调量n10%。
电流调节器按典型I型系统设计,并取参数KT=0.5。
已知所用直流电动机参数为:
PN=500kWUN=750V,In=760Ann=375r/min,
电动势系数Ce=1.82V•min/r,电枢回路总电阻R=0.14Q,允许电流过载倍数
入=1.5,触发整流环节的放大倍数Ks=75,电磁时间常数T|=0.031s,机电时间常数
Tm=0.112s,电流反馈滤波时间常数Tai=0.002s,转速反馈滤波时间常数T°n=0.02s。
设调节器输入输出电压Lbn*=Uim*=Uhm=10V,调节器输入电阻R)=40kQ。
(1)、整流装置滞后时间常数Ts:
三相桥式电路平均失控时间Ts0.0017s。
(2)、电流滤波时间常数Toi:
Toi0.002s
(3)、电流小时间常数Ti:
按小时间常数近似处理:
TiTsToi0.0037s
根据设计要求i5%,并保证稳态电流无差,可按典型I型系统设计电流
调节器。
电流环控制对象是双惯性型的,因此可用PI型电流调节器,其传递函数
为:
检查对电源电压的抗扰性能:
巴丄空8.11
Ti0.0037s
电流调节器超前时间常数:
iTl0.03s
取电流反馈系数:
U:
1.51760°-009VA
电流环开环增益:
取KITi0.5,因此
于是,ACR勺比例系数为:
校验近似条件
电流环截止频率:
ciKi135.14s
晶闸管整流装置传递函数的近似条件:
忽略反电动势变化对电流环动态影响的条件:
电流环小时间常数近似处理条件:
按所用运算放大器取R040k,各电阻和电容值为:
RKiR00.868940k34.76k,取35k
0031
Cii3F0.89106F0.89F,取0.89F
R3510
Coi4ToL4°^F0.2106F0.2F,取0.2F
R040103
按照上述参数,电流环可以达到动态跟随性能指标q4.3%5%
2、转速环ASR
2.1调节器结构
调节器实现采用含给定滤波和反馈滤波的模拟式PI型转速调节器,其原理
图如图7.1所示。
图中Un为转速给定电压,n为转速负反馈电压,调节器的
输出是电流调节器的给定电压Ui。
图7.1PI型转速调节器
2.2调节器参数计算
电流环等效时间常数:
—2Ti20.0037s0.0074s
Ki
转速滤波时间常数:
Ton0.02s
转速环小时间常数:
按小时间常数近似处理,取
1
TnTon0.0074s0.02s0.0274s
Ki
电压反馈系数:
Unm10V
0.03Vminr
nN375rmin
按设计要求,选用
PI调节器,其传递函数为:
WASR(S)
Kn(nS1)
按跟随和抗扰性能都较好的原则,取h=5,则ASR的超前时间常数为:
hTn50.02740.137s
转速开环增益为:
于是,ASR的比例系数为:
(h1)CeTm60.0091.820.112
Kn9.56
2hRTn250.030.140.0274
校验近似条件
转速环截止频率为
电流环传递函数简化条件为:
转速环小时间常数近似处理条件为:
计算调节器的电阻与电容
按所用运算放大器取R。
40k,则
RnKnR09.5640k382.6k,取380
Con晋帶F210乍2F,取2F
按退饱和超调量的计算方法计算调速系统空载启动到额定转速时的转速超
调量:
7600.14
n2(7)(Z)专#2°8121^幣停10%
能满足设计要求
三、电平检测器
电平检测器的功能是将控制系统中连续变化的模拟量转换成“1”或“0”两
种状态的数字量,它实际上是一个A/D转换器。
一般可用带正反馈的运算放大器构成,并且具有一定要求的回环继电特性,其原理、结构及回环继电特性如图7
所示
Uexm2
图7电平检测器原理图、结构图及其回环继电特性
继电特性的回环宽度为:
UkUsr2Usr1K1(Uscm2Uscm1)(5_[)
式中,K1为正反馈系数,K1越大,则正反馈越强,回环宽度就越小;Usr2和
Uscml和
Usr1分别为输出由正翻转到负及由负翻转到正所需的最小输入电压;
Uscm分别为反向和正向输出电压。
逻辑控制系统中的电平检测环宽一般取0.20.6V,环宽大时能提高系统抗干扰能力,但环太宽时会使系统动作迟钝
电平检测器根据转换对象的不同,又分为DPT与DPZ.
Ut
*
Ui
4.4无环流逻辑控制器DLC的设计
无环流逻辑控制器的任务是:
根据可逆系统的运行状态,正确地控制两组晶闸管装置触发脉冲的封锁与开放,使得在正正晶闸管VF工作时封锁反组脉冲,在反组晶闸管VR工作时封锁正组脉冲。
两组触发脉冲决不能同时开放。
为了知道是根据什么信息来指挥逻辑控制器的动作,我们首先分析一下系统的各种运行状态与晶闸管装置工作状态的关系。
可逆系统共有四种运行状态,即
四象限运行。
当电动机正转和反向制动时,系统运行在第I象限和第W象限,它们共同点是电枢电流方向为正(在磁场极性不变时,电磁转矩方向与电枢电流方向相同),这时正组晶闸管VF分别工作在整流和逆变状态,而反组晶闸管VR都处于待工作状态。
当电动机反转和正向制动时,系统运行在第川和第U象限,其共同点是电枢电流方向为负,这时反组晶闸管VR分别工作在整流和逆变状态,而正组晶闸管VF都处于待工作状态。
由此可见,根据电流的方向(也就是电磁转矩的方向)就可以判断出两组晶闸管所处的状态(工作状态或待机状态),从
而决定逻辑控制器应当封锁哪一组,开放哪一组。
具体为:
当系统要求有正的电枢电流时,逻辑控制器开放正组触发脉冲,使正组晶闸管工作,而封锁反组触发脉冲;当系统要求有负的电枢电流时,逻辑控制器当开放反组触发脉冲,使反组晶闸管工作,而封锁正组触发脉冲。
速度调节器ASR的输出U*,也就是电流给
定信号,它的极性正好反映了电枢电流的极性。
所以,电流给定信号Ui*可以作
为可以作为逻辑控制器的指挥信号。
DLC首先鉴别Ui*的极性,当Ui*由正变负时,封锁反组,开放正组;反之,当U*负由变正时,封锁正组,开放反组。
然而,U*的极性变化只是逻辑切换的必要条件,而不是充分条件。
从有环流可逆系统制动过程的分析中可以看出这个问题,例如,当正向制动开始时,Ui*的极性由负变正,但当实际电流方向未变以前,仍须保持正组开放,以便进行本组逆变。
只有在实际电流降到零时,才应该给DLC发出命令,封锁正组,开放反组,转入反组制动。
因此,在U*改变极性以后,还需要等到电流真正到零时,再发出“零电流检测”信号Uo,才能发出正、反组切换指令,零电流检测”信号Uo作为逻辑控制环节的第二个输入信号。
逻辑切换指令发出后并不能马上执行,还须经过两段延时时间,以确保系统的可靠工作,这就是封锁延时tl和开放延时t2。
封锁时间——从发出切换指令到真正封锁掉原来工作组的触发脉冲之前所等待的时间。
因为电流未降到零以前,其瞬时值是脉动。
而检测零电流的电平检测器总有一个最小动作电流值Io,如果脉动的电流低于Io而实际仍然在连续变化时,就根据检测到的零电流信号去封锁本组脉冲,势必使正处于逆变状态的本组发生逆变颠覆事故。
设置封锁延时后,检测到的零电流信号等待一段时间ti,使电流确定下降为零,这才可以发出封锁本组脉冲的信号。
开放延时——从封锁原工作组脉冲到开放另一组脉冲之间的等待时间。
因为在封锁原工作组脉冲时,已被触发的晶闸管要到电流过零时才真正关断,而且在关断之后还要一段恢复阻断能力的时间,如果在这之前就开放另一组晶闸管,让可能造成两组晶闸管同时导通,形成环流短路事故。
为防止这种事故发生,在发出封锁本组信号之后,必须等待一段时间12才允许开放另一组脉冲。
由上可见,过小的ti和t2会因延时不够而造成两组晶闸管换流失败,造成事故;过大的延时将使切换时间拖长,增加切换死区,影响系统过渡过程的快速性。
对于三相桥式电路,一般去ti=3ms,t2=ioms。
最后,在DLC中还必须设置联锁保护电路,以确保两组晶闸管的触发脉冲不能同时开放。
综上所述,对于逻辑无环流控制器的要求可以归纳如下:
(1)两组晶闸管进行切换的必要充分条件是,电流给定信号改变极性U*和零电流检测器发出零电流信号Uo,这时才能发出逻辑切换指令。
(2)发出切换指令后,须经过封锁延时tdi才能封锁原导通组脉冲;再经过开放延时td2后,才能开放另组脉冲。
(转矩极性)
□~7
电平
零电流检测信号、
TT广〉
检测
电流给定极性信号
(3)在任何情况下,两组晶闸管的触发脉冲决不允许同时开放,当一组工作时,另一组的脉冲必须被封锁住。
封锁正组脉冲
其原理图如图5.5所示。
其主要由逻辑判断电路、延时电路、逻辑保护电路、推电路和功放电路等环节组成。
(1)逻辑判断环节
逻辑判断环节的任务是根据转矩极性鉴别和零电平检测的输出UM和U状态,
正确地判断晶闸管的触发脉冲是否需要进行切换(由UM是否变换状态决定)及切
换条件是否具备(由U是否从“0”变“1”决定)。
即当UM变号后,零电平检测到主电路电流过零(UI=“1”)时,逻辑判断电路立即翻转,同时应保证在任何时刻逻辑判断电路的输出UZ和UF状态必须相反。
为了确定逻辑判断电路的逻辑机构,先列出各种情况下逻辑判断电路各量之间的逻辑关系于表1中。
表1辑判断电路各量之间的逻辑关系
运行
状态
转矩(电流给定)极性
电枢
电流
逻辑电路输入
逻辑电路输出
Te
*
U
UT
UZ
UF
UR
正向启动
+
一
无
1
1
1
0
+
一
有
1
0
1
0
正向运行:
+
一
有
1
0
1
0
正向制动
一
+
有(本组逆变)
0
0
1
0
一
+
无(逆变结束)
0
1
0
1
一
+
有(制动电流)
0
0
0
1
反向启动
一
+
无
0
1
0
1
一
+
有
0
0
0
1
反向运行
一
+
有
0
0
0
1
反向制动
+
一
有(本组逆变)
1
0
0
1
+
一
无(逆变结束)
1
1
1
0
+
一
有(制动电流)
1
0
1
0
 升级会员
升级会员 