平板式扫描仪Word下载.docx
《平板式扫描仪Word下载.docx》由会员分享,可在线阅读,更多相关《平板式扫描仪Word下载.docx(14页珍藏版)》请在冰豆网上搜索。
驱动器一般都具有细分功能,常见的细分倍数有:
1/2,1/4,1/8,1/16,1/32,1/64,1/256;
或:
1/5,1/10,1/20。
细分后步进电机的步距角=电机固有步距角/细分数
例如:
一台1.8°
电机设定为4细分,其步距角为1.8°
/4=0.4°
。
当细分等级大于1/4后,电机的定位精度并不能提高,只是电机转动更平稳。
2、方案比较
扫描仪所用的传感器大致分为以下三种
(1)光电耦合器(CCD)
电荷耦合器件(CCD)在单硅片上集成了几千到几万只光敏三极管,这些光敏三极管分成三列,分别用红、绿、蓝色的滤色镜罩住,从而实现了彩色扫描。
光敏三极管受到光线照射时可产生电流.再经放大后输出。
使用CCD作为感光元件的扫描仪,需要通过由一系列透镜、反射镜等组成的光学系统将图像传送到CCD芯片上,所以体积一般较大。
CCD的优势在于,经它扫描的图像质量较高,具有一定的景深,能扫描凹凸不平的物体,对隆起的书脊甚至实物都可得到清晰的扫描效果,CCD的温度系数较低,对于一般的工作,周围环境温度的变化可以忽略不计。
CCD型传感器的缺点:
由于组成CCD的数千个光电三极管的距离很近(微米级),在各光电三极管之间存在着明显的漏电现象,各感光单元的信号产生的干扰降低了扫描仪的实际清晰度;
需要一整套光学系统,包括照明冷光源和多个反光镜和光学镜头,通过复杂的光路在CCD传感器件表面成像,故扫描仪体积难以做得很小;
它的组成部件较为复杂,成本相对较高,扫描后对图像数据的处理也相对复杂。
一般使用冷阴极管做光源,需要预热1分钟左右才能稳定发光。
除此之外,由于CCD需要通过一系列透镜、反射镜成像,因此,会产生色彩偏差和光学像差,一般需要通过扫描软件进行色彩校正。
(2)接触式图像传感器(CIS)
CIS(ContactImageSensor)是接触式图像传感器的英文缩写。
CIS以发光二极管(LED)阵列作为光源,扫描光线不经过反射镜,而是直接被光耦合器接收。
CIS器件一般采用制造光敏电阻的硫化镉做感光材料。
CIS型传感器的优点:
采用模块化结构,集扫描光源、传感器和放大器为一体,结构、原理和光路都极为简单,没有附加的光学部件、不需要预热、功耗低、价格便宜、便于更换;
由于传感器直接从稿件表面获取图像,理论上不会产生像差和色偏,因此能获得最接近原稿的图像效果;
能够降低设计制造成本,而且产品的体积可以设计得更薄、更小;
没有明显的等待时间。
CIS型传感器的缺点:
不能做成高分辨率的扫描仪,扫描速度也比较慢。
扫描精度较低、景深小(约为0.3mm,只有CCD景深的1/10)、不能扫描实物、只适合扫描文稿;
它的光源只能用LED发光二极管,这种光源无论在光色以及均匀度上都比较差,色域较CCD窄,获得的色彩不如CCD的丰富,色彩还原能力远不如CCD,而且光源的寿命比较短。
此外,它不能使用镜头,只能压近原稿扫描。
(3)光电倍增管(PMT)
光电倍增管实际是一种电子管,其感光材料主要是由金属铯的氧化物及其他一些活性金属(一般是镧系金属)的氧化物共同构成,这些感光材料在光线的照射下能够发射电子,经栅极加速后冲击阳电极,最后形成电流,再经过扫描仪的控制芯片进行转换,就生成了物体的图像。
在所有的感光器件中,光电倍增管是性能最为优秀的一种,其灵敏度、噪声系数、动态密度范围等关键性指标远远超过了CCD及CIS等感光器件。
同时,这种感光材料几乎不受温度的影响,可以在任何环境中工作。
但是这种扫描仪的成本极高,一般只用在最专业的滚筒式扫描仪上。
扫描仪常用传感器的性能一览表见表2.1
表2.1扫描仪常用传感器性能一览表
综上所述,我们得知CIS型传感器虽结构简单、成本较低、体积小,但是其分辨率和景深方面远不如CCD型传感器,扫描层次也有些不足,尤其是遇到扫描摆放不平的文稿和图片时就显得力不从心了,而且CIS发光元件寿命较短,色彩还原能力远不如CCD,因此其综合性能要低于CCD型传感器,光电倍增管虽在关键指标上远远超过了CCD及CIS等感光器件,但是其成本过高,不适合绝大多数普通扫描仪使用,因此,我们最终选择CCD型传感器作为彩色扫描仪的传感器。
3、方案结构
本系统选用的是单芯片实现方式,采用由美国国家半导体公司(NS)专为图像采集系统设计生产的单芯片LM9832为核心处理器,芯片实现原来由A/D转换模块、同步及时序模块、数字处理模块、接口模块所实现的所有功能。
本系统由LM9832控制芯片、CCD传感器、步进电机及其驱动管、通信接口电路以及缓存等部分组成,其硬件结构框图如图3.1所示
图3.1
各组成部分所实现的功能及特点如下:
1、主控芯片模块:
主控芯片LM9832是一个带USB接口的单片图像扫描芯片,可提供构成一台高性能彩色扫描仪所必需的全部功能,包括图像传感器控制,照度控制,模拟输入通道,图像数据缓存器/DRAM控制器,微步进电机控制器和USB接口。
允许设计成USB总线供电的扫描仪。
在装有USB接口的计算机上可以即插即用。
计算机通过与硬件采集系统相连的USB接口获取图像信息,并最后在应用程序中还原所采集图像。
2、CCD模块:
该模块主要工作是从芯片LM9832接收驱动时序,从而驱动线阵CCD器件工作,然后将器件的输出信号,高保真地传送给核心芯片进行处理,但由于从芯片输出的驱动时序信号的伏数不能达到CCD器件要求,需加驱动芯片将驱动时序信号提升到CCD所要求的5伏,这里我们选用74AC04作为系统CCD时序信号驱动芯片,对于CCD输出信号部分,系统采用电流放大电路保证信号高品质的传送给核心处理芯片。
3、步进电机模块:
它是扫描仪机械传动部分的核心,是驱动扫描装置的动力源。
步进电机其实就是用脉冲信号精确控制移动的一种电机,扫描仪的噪音和速度在一定程度上就是由它决定的。
在扫描仪扫描图像的过程中,扫描头要依靠步进电机来拖动。
4、USB接口模块:
本模块负责将从主控芯片处理后传出的信号传送到计算机中,由于主控芯片内部已经集成了USB控制芯片,这里只需要对D+和D-进行连接,数据通过D+和D-引脚接收和发送。
如图3.2所示
图3.2
5、外部DRAM:
外部DRAM中有少部分空间用于存储用于校正的偏移系数和增益系数,除此之外的大部分空间是用来暂存图像数据的。
如果把图像数据直接传输到计算机里,那么就会发生数据丢失和影像失真等现象,如果先把图像数据暂存在数据缓存里,然后再传输到计算机,就减少了上述情况发生的可能性。
四、传感器及其它器件选型
1、CCD传感器选型
考虑到LM9832支持像素总数高达16384像素×
3色(1200dpi×
13.6英寸)的传感器,为了保证系统采集的图像质量,本系统选择东芝(TOSHBIA)公司的TCD2901D型号的线阵CCD作为图像采集的前端。
TCD290lD是日本东芝(TOSHIBA)公司生产的线阵CCD图像传感芯片,感光像元数高达10550个,像元尺寸及间距为4μm×
4μm,分辨率高达1200DPI,TCD2901D具有灵敏度高、暗电流低等特点,并在器件内部集成了CCD驱动电路和箝位电路。
TCD29OID是专为通信传真、图像扫描、光学字符阅读机等场合设计。
器件由四个5V的驱动时钟(SH、RS、φ1、φ2)驱动,工作电压为12V。
TCD2901D具有如下特性:
(1)超高的感光像元数:
10550单元×
3线
(2)超小的像元间距:
4μm×
4μm
(3)时钟驱动方式:
两相(5V)
(4)电源供应:
12V
(5)内部电路:
箝位电路
(6)色彩:
红,绿,蓝
2、步进电机选型
控制芯片LM9832内部具有微步进电机控制器,给步进电机发送一系列脉冲,使步进电机移动传感器通过纸张。
步进电机的移动速度不仅与所用传感器有关,而且它和图像传感器的积分时间还决定了垂直分辨率。
步进电机究竟是向前移动还是向后移动,则由A、B两个信号来决定,二者的相位差为90°
步进电机的工作模式分为满步进和微步进两种:
(1)满步进模式
在满步进模式下,A、B信号均为方波,它们的波形如图4.1所示。
LM9832通常以微步进为单位来计算步进电机的步数,一个满步进等于4个微步进,即使LM9832在满步进方式时,也按微步进计数,每4个微步进增加一个满步进数。
图4.1
(2)微步进模式
微步进是用一个阶梯形的近似正弦波来驱动步进电机的技术,其波形如图4.2所示。
该技术不仅能提高步进电机的分辨率(它具有细化作用),进而提高扫描仪的最大垂直分辨率,还可使电机运行得更加平稳。
例如,若步进电机每个满步进移动3.6°
,则微步进在3.6°
的范围内可以产生0.9°
、1.8°
、2.7°
这三个位置,使扫描仪的最大垂直分辨率提高4倍。
图4.2
微步进正弦波的振幅受步进电机DAC的输出控制,振幅波形如图4.3所示。
步进电机绕组中的电流值可通过测量电流检测电阻(RSENSE)两端的压降而计算出来。
步进电机驱动信号经过脉宽调制(PWM)后迫使通过线圈的平均电流等于UDAC/RSENSE。
图4.3
该技术不仅能提高步进电机的分辨率,进而提高扫描仪的最大垂直分辨率,还可使电机运行得更加平稳。
根据上述情况,再考虑到扫描仪对步进电机体积的要求,最终选择57系列两相混合式步进电机LL57HB56.
3、外部DRAM
LM9832支持2种规格的外部DRAM:
256K×
16位和1M×
16位。
DRAM中的48K字(16K像素×
3种颜色)用于存储增益系数,另外48K字(16K像素×
3种颜色)用于存储偏移系数。
系统所用缓冲存储器部分,选用ALLIANCE半导体公司设计生产的256K×
16位动态存储器AS4C1M16E5-50,存取时间只需50ns。
软件设计
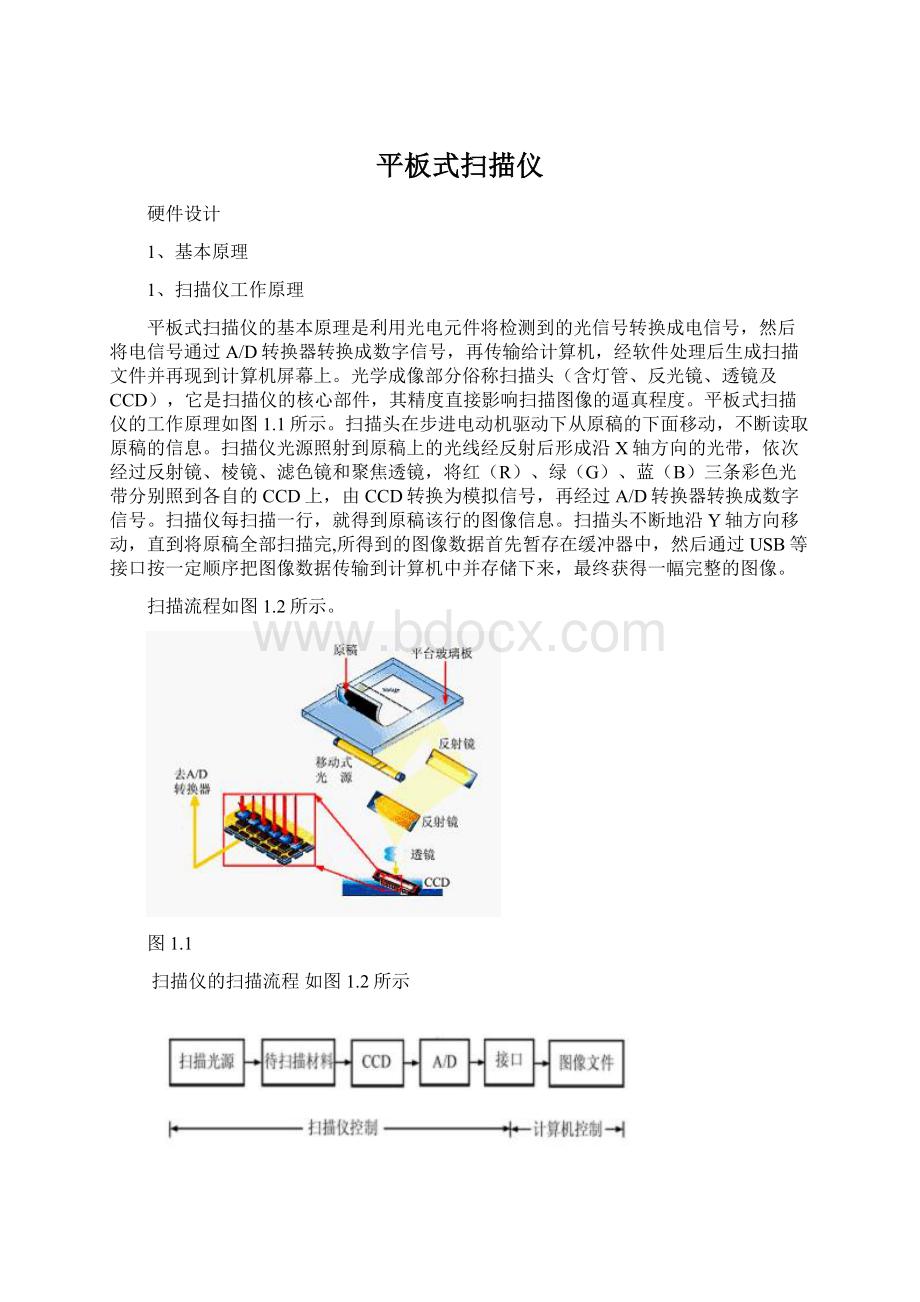
五、扫描仪图像采集工作流程:
1、初始化LM9832:
上电后,首先完成对芯片LM9832的初始化,完成对各寄存器值的初始化设置。
2、CCD传感器检测:
检测光学传感器是否就位,如果没有就位,将提示SensorNotHomed。
这时需重新设置CCD传感器位置。
3、计算初始化参数:
初始化各端口设置,检查与计算机的通讯连接情况,并根据用户在数据源操作界面内设置的各类扫描参数,进行计算后,设置到对应寄存器内。
4、计算PC机I/0口传输速度:
根据用户的不同设置,系统将扫描1秒的图像信息,计算出平均数据传输速率,这个速率将用于在以后扫描过程中计算最佳扫描传输速度。
5、增益和偏移校正:
设置扫描时参考使用的增益校正系数和偏移校正系数,这些系数将在扫描时用于校正得到的像素信息。
6、Gamma校正
通过查表的方式来获得CCD的输入与输出之间的映射关系,从而对数据进行校正。
7、扫描:
获取处理后的图像信息,在应用程序中显示图像。
8、复位:
PC机发送一个高速反转指令,把传感器送回到初始位置。
其流程图如图所示:
否
是
6、扫描图像校正
在扫描仪成像的整个过程中,存在很多会给扫描图像带来误差的因素,比如光照的不均匀性、由CCD生产工艺所引起的各个像素单元感光响应的不一致性、信号的采样、模数转换及后续各种处理电路内部所存在的噪声等等。
扫描图像校正的目的在于最大程度地消除这些因素所带来的成像误差,提高并保证扫描图像的质量。
CCD像点感光的非线性、光学镜头透光的非均匀性以及色彩还原的不一致性,导致数字化后的图像存在偏差,而像素率校正是解决该偏差的必须的、最基础的手段。
因线阵CCD的感光像元各自独立并以线阵的方式直线排列,故其各像元、各通道的偏移系数、增益系数各自独立并与各自对应的光敏器件及其在CCD线阵中所处位置相关。
校正前,需将这些校正系数按照一定的格式和顺序存储在存储器中。
校正时,根据当前校正像元的位置及R、G、B通道次序从存储器中读取对应的系数值进行计算。
CCD输出的信号有偏移误差和增益误差,针对这两种类型的偏差,本文设计的像素率校正过程如下:
1、偏移校正
CCD像素信号在累积、转移以及输出过程中不可避免地会引入噪声干扰,使得CCD输出信号中始终存在一定的直流分量。
因而在无光照的情况下,CCD的输出电平不是0,而存在一定的偏移误差。
为了消除这种误差,就要进行相应的偏移校正。
像素率偏移校正:
对CCD的每个像素进行偏移校正的字存储在外部DRAM中,并以像素率的形式来存取。
偏移校正方程为
输出像素=输入像素-系数(4)
2、增益校正
由于CCD中各个像素感光响应并不一致,加之照明的不均匀,从而造成扫描目标白色时,各个像素的输出值也存在一定差异,为此,需要进行像素率的增益调整来使得各个像素的输出达到均匀。
像素率增益校正是一个数字乘法器,它用一个对应于该像素增益误差的16位数字校正系数与减法器输出的字相乘。
这些系数存储在外部DRAM中,以像素率的形式来存取。
增益方程为
输出像素=输入像素×
(系数/16384)(5)
3、Gamma校正
在理想情况下,CCD图像传感器的信号输出幅值应该与被扫描物体反射的光强成线性关系,而实际上,这种输出与输入是呈非线性关系的,通常呈现出Y=
的形式。
因此,可以通过为CCD传感器的输出再作用一个函数关系
,从而
得到了Y=X。
将这种校正方式称为Gamma校正,如图5.1所示。
CCD输入输出特性曲线校正函数曲线
等效的CCD输入输出特性曲线
图5.1Gamma校正原理图
为了减轻校正过程中直接利用函数关系Y=
进行计算的复杂性、提高Gamma校正的效率和可操作性,LM9832将Gamma校正所体现的输入与输出之间
的映射关系以Gamma表的方式描述。
在实际校正过程中,通过查表的方法来获得
输入与输出之间的映射关系,达到数据校正的目的。
对应于R、G和B,有三个Gamma校正表。
Gamma校正表亦称图像灰度校正表,用它可绘制图像的Gamma曲线,反映出原图像与处理结果之间的中间像素亮度变化情况。
如图5.2所示,x轴代表原图像的像素亮度,其数值从0~255;
y轴代表处理后新像素的亮度。
当曲线向下移动时,图像的相应像素就变暗;
向上移动时,像素就变亮。
图像的对比度可通过调整曲线的斜率来改变。
斜率越大,对比度越大;
斜率越小,对比度越小。
图5.2
校正过程主要是对三通道CCD像点数据进行像素率的偏移、增益校正及Gamma校正。
本系统使用的是256K×
16位的DRAM,其地址空间为0-3FFFFH,待处理的48K图像数据存放在DRAM的0000-7FFF中,而R、G、B三通道的偏移、校正系数以及Gamma查找表依次存放在DRAM指定的地址中,各个系数按表5.1的存储结构进行存储。
表5.1各个校正系数在DRAM存放的地址
校正系数类型
存放的地址
待处理数据DATA
0-BFFFH
偏移系数
C000H-17FFFH
增益系数
18000H-23FFFH
R通道的Gamma校正表
24000H-24FFFH
G通道的Gamma校正表
25000H-25FFFH
B通道的Gamma校正表
26000H-26FFFH
程序对模拟输入通道输出的像点数据流逐像点的进行减去偏移系数、乘上增益系数,并以乘得的结果查找Gamma表,最终输出的数据为校正完毕的数据。
偏移、增益系数及Gamma表存放在同一DRAM的指定区域内,程序按照模拟输入通道输出的像点数据的次序依次从DRAM中读取校正系数并完成校正计算。
每个像素点的R、G、B三通道数据都要经过上述校正流程,本设计针对像素数据的R通道进行处理,其他两个通道的校正过程同理。
系统校正过程流程图如下图所示:
 升级会员
升级会员 