《自动控制原理》总复习Word文档下载推荐.docx
《《自动控制原理》总复习Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《《自动控制原理》总复习Word文档下载推荐.docx(17页珍藏版)》请在冰豆网上搜索。
稳、快、准。
6.典型输入信号:
脉冲、阶跃、斜坡、抛物线、正弦。
二、基本要求
1.对反馈控制系统的基本控制和方法有一个全面的、整体的了解。
2.掌握自动控制系统的基本概念、术语,了解自动控制系统的组成、分类,理解对自动控制系统稳、准、快三方面的基本要求。
3.了解控制系统的典型输入信号。
4.掌握由系统工作原理图画方框图的方法。
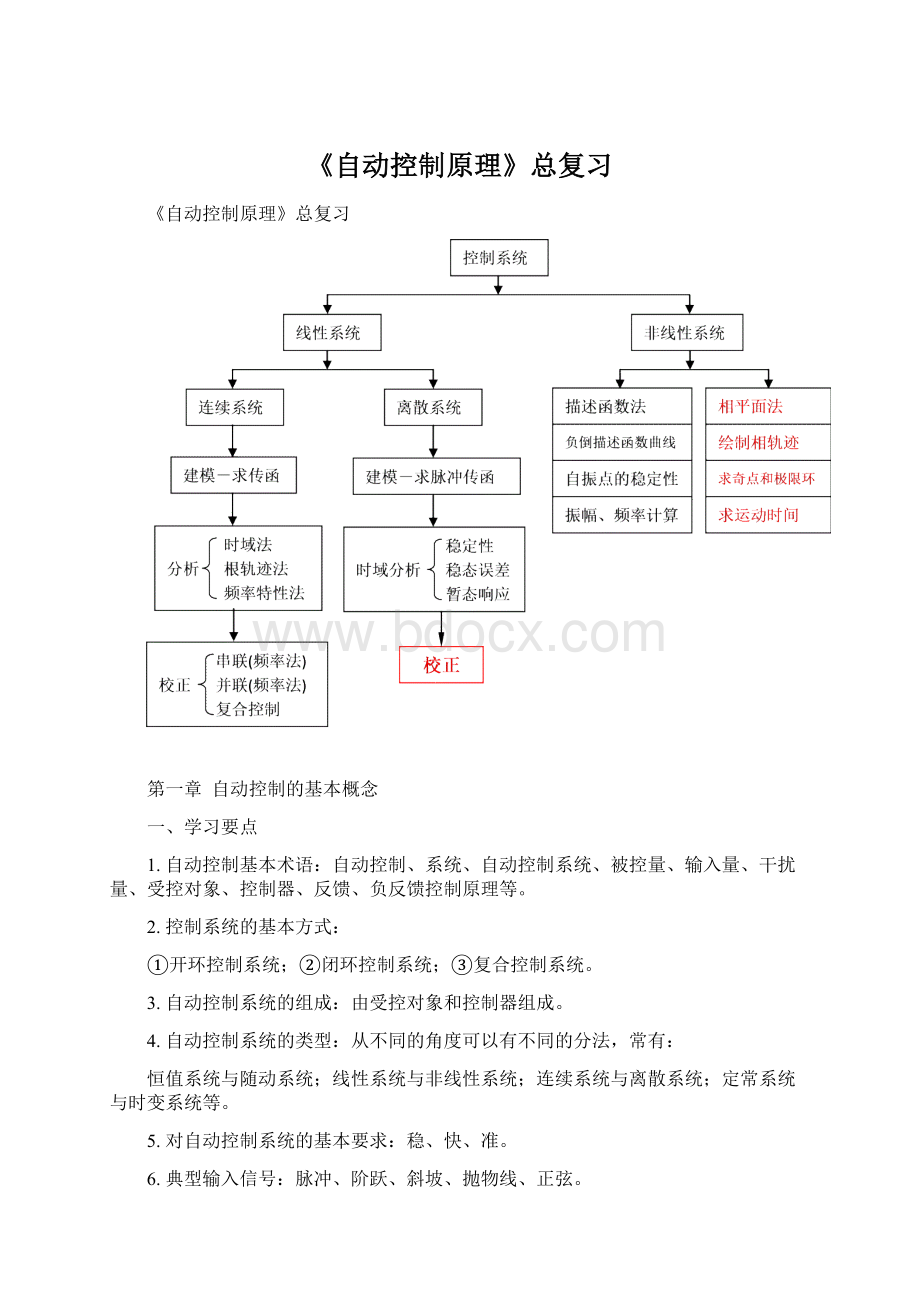
三、内容结构图
四、知识结构图
第二章控制系统的数学模型
1.数学模型的数学表达式形式
(1)物理系统的微分方程描述;
(2)数学工具—拉氏变换及反变换;
(3)传递函数及典型环节的传递函数;
(4)脉冲响应函数及应用。
2.数学模型的图形表示
(1)结构图及其等效变换,梅逊公式的应用;
(2)信号流图及梅逊公式的应用。
1、正确理解数学模型的特点,对系统的相似性、简化性、动态模型、静态模型、输入变
量、输出变量、中间变量等概念,要准确掌握。
2、了解动态微分方程建立的一般方法及小偏差线性化的方法。
3、掌握运用拉氏变换解微分方程的方法,并对解的结构、运动模态与特征根的关系、零输入
响应、零状态响应等概念有清楚的理解。
4、正确理解传递函数的定义、性质和意义。
熟练掌握由传递函数派生出来的系统开环传递函数、闭环传递函数、误差传递函数、典型环节传递函数等概念。
(#)
5、掌握系统结构图和信号流图两种数学模型的定义和绘制方法,熟练掌握控制系统的结构图及结构图的简化,并能用梅逊公式求系统传递函数。
(##)
6、传递函数的求取方法:
1)直接法:
由微分方程直接得到。
2)复阻抗法:
只适用于电网络。
3)结构图及其等效变换,用梅逊公式。
4)信号流图用梅逊公式。
第三章控制系统的时域分析
1.基本概念:
稳定性、时域响应、动态性能指标、误差与稳态误差等。
2.控制系统的稳定性
(1)劳斯稳定判据;
(2)赫尔维茨稳定判据。
3.控制系统的动态性能
(1)一阶系统的暂态响应;
(2)二阶系统的暂态响应。
4.控制系统的稳态性能
(1)一般概念;
(2)误差系数。
1.了解线性定常系统的时域响应组成,熟悉控制系统暂态响应性能指标的定义(#)。
2.掌握一阶系统的暂态响应及性能指标,并能根据给出的指标确定满足要求的系统参数T。
3.掌握二阶系统的暂态响应分析及其与极点之间的关系,重点掌握二阶系统的暂态响应性能指标公式及计算,并能根据给出的指标确定满足要求的系统参数
和
,尤其是改善二阶系统动态性能的两种措施。
(#)(#)
4.一般了解高阶系统的暂态响应,掌握闭环主导极点的概念。
5.了解稳定性的概念,掌握线性定常系统稳定的充要条件(#)。
6.重点掌握判断稳定性的Routh代数判据及应用(#)(#),对Hurwitz判据有一般了解。
能根据系统要求确定满足稳定的系统参数范围(#)(#)。
7.了解稳态误差的概念、定义、产生原因、类型。
8.重点掌握给定稳态误差终值的计算,稳态误差系数的计算,扰动稳态误差终值的计算及减小稳态误差的方法,并能根据系统对稳态误差的要求确定系统参数。
第四章控制系统的根轨迹法
1.基本概念
(1)根轨迹定义
(2)根轨迹绘制的基本条件:
幅值方程和相角方程。
2.绘制根轨迹的基本法则
(1)常规根轨迹的绘制法则
(2)参量根轨迹绘制
(3)零度根轨迹绘制
3.增加开环零极点对根轨迹的影响
4.利用根轨迹分析系统
①稳定性;
②运动形式;
③主导极点;
④超调量;
⑤调节时间;
⑥实数零、极点的影响;
⑦偶极子及其处理。
1.重点掌握绘制常规负反馈系统根轨迹的基本条件和基本法则;
2.理解参量根轨迹和零度根轨迹的绘制;
3.了解多回路控制系统的根轨迹;
4.掌握增加开环零极点对根轨迹的影响;
5.能根据根轨迹分析系统性能随参数变化的趋势。
第五章控制系统的频率特性
1.频率特性的定义
2.频率特性的几何表示
(1)极坐标图或奈奎斯特图(Nyquist图)
(2)对数频率特性曲线(Bode图)
3.典型环节的频率特性及最小相位系统
(1)典型环节频率特性
(2)最小相位系统与非最小相位系统
4.稳定判据
(1)奈奎斯特稳定判据
(2)对数频率特性的稳定判据
5.开环频域指标
(1)幅值裕度
(2)相角裕度
6.闭环频域指标
(1)零频幅值M(0)
(2)带宽频率
(3)谐振峰值Mr和谐振频率
(4)闭环系统频域指标与时域指标的关系
7.开环对数频率特性与时域性能指标:
(1)三频段的概念
(2)开环系统频域指标与时域性能指标的关系
1.正确理解频率特性的概念,掌握典型环节的频率特性并运用频率特性分析系统的稳态响应。
2.熟练掌握绘制开环系统Nyquist图和Bode图的方法,会求剪切频率
(#)(#)。
3.重点掌握奈奎斯特稳定判据及其在系统分析中的应用。
4.重点掌握相角裕度、幅值裕度的计算。
5.掌握开环对数频率特性与系统性能之间的关系,正确理解三频段的概念。
6.正确理解并掌握用实验数据确定传递函数,由最小相位系统的Bode图确定系统的传递函数的方法,会求开环放大系数
。
第6章控制系统的校正
1.控制系统校正的一般概念
2.控制系统的性能指标
3.校正方法──频率法,根轨迹法
4.校正方式
1)串联校正;
2)反馈校正;
3)串联反馈校正;
4)前馈补偿校正(复合控制)。
5.基于频率响应法的串联校正
1)串联超前校正;
2)串联滞后校正;
3)串联滞后—超前校正;
4)三种串联校正方法的特点与作用;
5)串联校正的希望特性法。
1.熟悉典型的无源校正装置,掌握校正网络的频率特性及其作用。
2.正确选择校正网络。
3.掌握串联校正的频率设计方法,重点掌握三种串联校正方式的特点与作用(#)(#)。
4.重点掌握期望特性的求取方法及串联校正的期望特性法。
5.重点掌握校正前后相角裕度、幅值裕度的计算。
6.了解反馈校正的频率设计法。
第七章线性离散控制系统
连续信号、离散信号、离散系统、采样过程、采样开关、保持器。
2.采样:
(1)采样过程;
(2)香农采样定理;
(3)零阶保持器。
3.离散系统的数学模型:
(1)差分方程;
(2)数学工具—z变换;
(3)脉冲传递函数。
3.系统分析
(1)离散系统稳定性分析
(2)准确性分析(离散系统的稳态误差分析)
(3)快速性分析与时间响应
(4)校正:
校正方法,数字校正装置的实现,最少拍系统的校正,无稳态误差的最少拍系统的校正
1、掌握离散控制系统的相关概念及离散控制系统与连续控制系统的主要区别。
2、掌握z变换、z反变换的概念及其主要性质。
3、充分理解采样定理及采样周期对离散控制系统的影响。
4、理解零阶保持器的具体含义及作用,熟悉零阶保持器的传递函数、频率特性及特点。
5、重点掌握脉冲传递函数的概念及其求解离散控制系统开环、闭环脉冲传递函数的方法。
6、正确理解离散控制系统稳定性的含义及其稳定的充要条件,熟练掌握离散控制系统的稳定
性判断方法,能根据系统要求确定满足稳定性的系统参数范围。
7、重点掌握计算离散控制系统的稳态误差方法。
8、了解离散控制系统极点分布与系统瞬态响应之间的关系,能根据给定输入求取离散控制系
统的时间响应。
9、正确理解离散系统的校正方法和数字校正装置的实现方法;
能对离散系统进行最少拍系统的校正和无稳态误差的最少拍系统的校正。
第八章非线性控制系统分析
1.非线性系统的特点
2.典型非线性环节及其对系统性能的影响
3.非线性系统分析
(1)描述函数法:
描述函数的应用前提、自振的分析及计算。
(2)相平面法:
①基本概念:
相平面、相轨迹、奇点、平衡点、相轨迹的走向、极限环等。
②相轨迹描述方法:
解析法、等倾线法。
1、从系统组成、数学描述、动态过程及分析方法等几方面来正确理解线性系统和非线性系统的基本概念和本质区别。
2、正确理解描述函数法的基本概念和应用前提。
3、利用描述函数法能够对系统作定性分析及求出一般近似解。
4、掌握负倒描述函数曲线的绘制方法。
5、重点掌握基于描述函数法计算系统自振参数及判断系统稳定性的方法。
6、正确理解相平面法的基本概念和特点。
7、掌握开关线、奇点及其类型、极限环等概念,尤其能判断奇点及其类型。
8、掌握线性系统和非线性系统的相轨迹绘制方法(解析法、等倾线法)。
 升级会员
升级会员 