考虑充电和等待时间的集装箱码头AGV调度文档格式.docx
《考虑充电和等待时间的集装箱码头AGV调度文档格式.docx》由会员分享,可在线阅读,更多相关《考虑充电和等待时间的集装箱码头AGV调度文档格式.docx(10页珍藏版)》请在冰豆网上搜索。
自动导引小车(AGV);
充电调度;
充电特性;
等待时间
中图分类号:
U691.3
文献标志码:
A
Abstract:
InordertoimprovetheworkefficiencyandutilizationrateofAGVs(automatedguidedvehicles)inautomatedcontainerterminals,anAGVschedulingmodelwiththeobjectiveofminimizingthetotaltaskcompletiontimeisestablished.Inthemodel,theAGV’spowercontinuationabilityandthedifferenceofpowerconsumptionbetweenheavyandemptyconditionsareconsidered,thetaskdistanceandtheemergencydegreeofeachtaskwhenAGVtaskselectionaretakenintoaccountcomprehensively,andthechargingendconditionofAGVissettoreducethewaitingtimeofAGVs.AnexampleissolvedbyJava.Theresultsshowthat,whenAGVsarechargedwithmulti-frequencyandtheallowableworkingpowerpercentageissetto71%,boththetotaltaskcompletiontimeandthepowerconsumptionaretheleast,andtheutilizationrateofAGVsishigher.
0引言
随着全球经济的快速发展,自动化集装箱码头发展迅猛。
为提高集装箱码头的自动化作业效率,各种自动化设备和技术被引入码头实际操作中,其中自动导引小车(automatedguidedvehicle,AGV)作为自动化集装箱码头的重要组成部分,已被广泛应用到码头水平作业中。
目前,自动化集装箱码头的AGV多采用纯电力驱动,具有节能环保、智能导航、成本较低等优势[1]。
在实际作业中,为保证AGV连续工作以完成装卸任务,需要及时为AGV充电。
同时,AGV在重载和空载行驶过程中耗电量不同[2]。
因此,本文对考虑充电和等待时间的集装箱码头AGV调度问题进行研究。
针对自动化集装箱码头水平运输问题,大部分学者主要对路径规划和车辆调度进行研究来提升作业效率。
荀燕琴[3]提出基于差分算法的蚁群算法研究AGV的路径规划;
LI等[4]提出人造鱼算法对AGV进行路径规划;
韩晓龙等[5]在不同调度策略下,对AGV进行调度配置仿真,寻求最优调度配置策略;
CONFESSORE等[6]将AGV调度问题转化成最小流问题,建立最小流型,利用贪婪算法和单纯形算法求解,结果表明,改进后的单纯形算法对最小化完成任务的平均时间和最大化AGV利用程度有显著效果;
ANGELOUDIS等[7]提出对AGV进行实时控制的调度方法,并得出该方法优于启发式算法的结论;
泰应鹏等[8]利用A*算法启发式地为多个AGV规划路径,解决多AGV在路径规划中的碰撞冲突问题;
梁承姬等[9]提出一种基于路段时间窗的AGV路径规划方法,有效实现了AGV的避碰;
刘二辉等[10]提出一种用于求解复杂环境下AGV路径规划问题的改进灰狼优化算法,并引入路径微调算子和邻域变异算子。
查阅大量文献发现,现有论文针对AGV调度考虑充电的较少,相关论文的主要研究内容如下:
张剑韬等[11]研究了非接触式无线充电技术在AGV中的应用;
HUANG等[12]设计了非接触式AGV充电系统,该系统中AGV具有应用双输出功能,AGV沿轨道移动时可进行充电;
LI[13]考虑了电量约束下的车辆路径优化问题;
FATNASSI等[14]提出具有电池约束的AGV调度问题;
傅正堂等[2]考虑了AGV重空载耗电差异,寻求最短总路径;
张亚琦等[15]给出了AGV充电与作业集成调度的混合整数规划模型,考虑充电过程对AGV实际作业的影响,分析AGV数量对运输时间的影响。
综上可知,大多研究主要针对AGV的充电技术,对影响AGV充电调度的因素考虑较为单一,对AGV充电调度的研究还不完善,如对AGV的充电规则及充电等待问题的研究较少。
总体上,本文考慮AGV的电量续航能力和重空载耗电差异,根据AGV到达剩余各任务起点的执行时间与各任务优先级的加权值进行任务选择,设置AGV充电结束条件,考虑多频次充电,缩短AGV充电等待时间,寻求约束条件下的最短完成任务总时间。
1问题描述
某自动化集装箱码头在某时段需完成一定数量的集装箱卸船任务,其中利用AGV将集装箱从各岸桥缓存区送至对应的场桥缓存区。
本文考虑AGV的电量续航能力和重空载耗电差异,对正充电的AGV设定一个允许工作电量百分比PU,当其充电量达到PU且有其他AGV等待充电时,就断开充电电源投入工作,减少其他AGV的充电等待时间。
港口实际作业任务的紧急情况依据货主需要集装箱离港的时间而定,本文将需要在3天内完成的集装箱离港任务按紧急程度划分为1、2、3级任务,分别代表最紧急、较紧急和不紧急任务;
AGV不与岸桥绑定,AGV在进行任务选择的同时考虑AGV到达剩余各任务起点的执行时间和各任务紧急程度,对这2个量进行无量纲化处理后,分别赋予权重因子α和β,选择二者加权值最小的任务,以此完成所有卸箱任务。
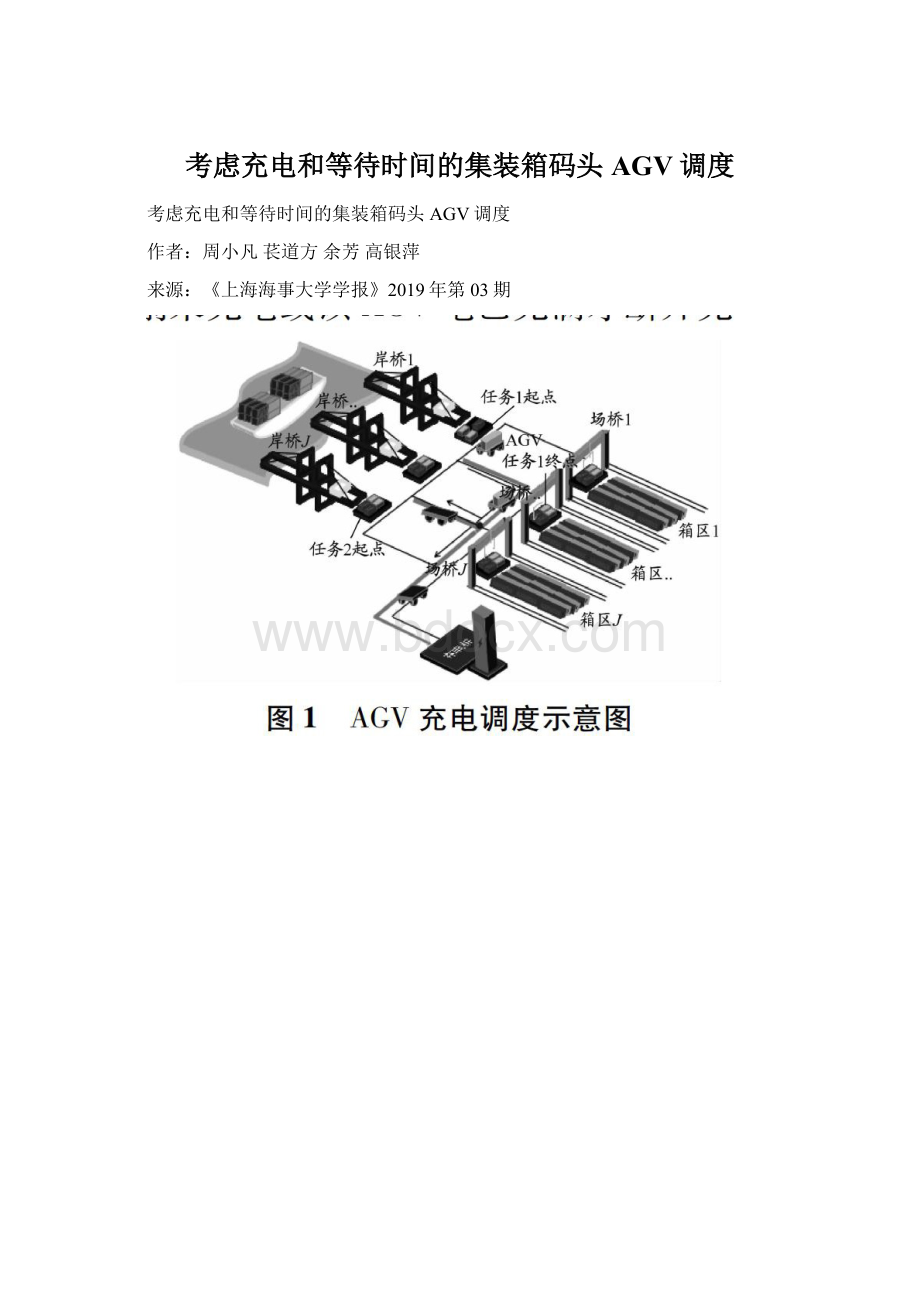
图1中:
AGV按照任务选择原则选择任务1后,前往任务1起点岸桥缓存区进行装箱,然后沿最短路径到达任务1终点场桥缓存区进行卸箱;
完成任务1后,再按照任务选择原则选择任务2,先判断AGV剩余电量是否能使其完成任务2并返回充电站,若能则去执行任务2,否则去充电站进行充电。
AGV到达充电站时,若有空闲充电桩则直接进行充电,否则等待其他正充电的AGV的电量达到PU后再开始充电。
若充电站无AGV等待充电,则正充电的AGV电量达到PU后将继续充电直至有其他AGV前来充电或该AGV电已充满才断开充电电源进入工作状态。
为完成所有集装箱装卸任务,AGV需要进行任务选择并判断是否需要充电,图2为AGV充电调度仿真流程。
2模型建立
2.1符号定义
K为任务集合,k∈K;
L为充电站集合,l∈L;
V为AGV集合,v∈V;
PL为AGV需要进行充电的最低电量;
Zk为任务k的紧急程度等级;
Bk为任务k的起点;
Ek为任务k的终点;
Ui,j和Hi,j分别为AGV从位置i至位置j的执行时间和消耗的电量;
Gvk(t)為决策变量,表示AGVv在时刻t执行待完成任务k所对应的时间等级;
Tk为决策变量,表示AGVv完成任务k的时间;
Cv(t)为决策变量,表示AGVv在时刻t的电量;
Sv(t)为决策变量,表示AGVv在时刻t的位置;
W为决策变量,表示待完成任务集合;
wv(t)为决策变量,表示AGVv在时刻t按照任务选择原则需完成的加权值最小的任务;
xvk(t)为决策变量,表示AGVv在时刻t到达任务k起点的执行时间与任务k紧急程度的加权值;
yv(t)为决策变量,表示AGVv在时刻t到达各任务起点的执行时间与各任务紧急程度的最小加权值。
2.2任务选择模型
任务选择原则依据AGV到达各任务起点的执
行时间、各任务的紧急程度进行设定。
AGV在完成上一任务后要选择下一执行任务,任务选择原则为:
对该AGV到达剩余各任务的执行时间与各任务的紧急程度进行加权,选择加权值最小的任务,约束条件如下,其中k∈K,v∈V。
式
(1)表示AGVv在时刻t的各剩余任务加权值的最小值;
式
(2)表示AGVv在时刻t的各剩余任务的加权值;
式(3)表示AGVv在时刻t选择加权值最小的任务k作为待执行任务,其中S1(x)为0-1函数(若x≥0则取1,否则取0)。
2.3考虑充电特性和等待时间的AGV调度模型
在任务选择模型的基础上,设定以下函数变量:
S2(x)为0-1函数,若x>
0则取1,否则取0;
S3(x)为0-1函数,若x=0则取1,否则取0;
Avk(t)为0-1变量,若wv(t)=k且电量满足任务k则取1,否则取0;
Mv(t)为0-1变量,若在时刻tAGVv不充电则取1,否则取0;
Qv(t)为0-1变量,若在时刻tAGVv断开充电电源则取1,否则取0。
假设在完成已知任务期间无其他船进港,不考虑缓存区容量限制、AGV在运输过程中和在堆场内的等待时间和AGV到达充电站进行充电的操作时间。
以完成任务总时间最短为目标,建立自动化集装箱码头AGV调度模型,模型的目标函数和约束条件如下,其中k∈K,v∈V。
式(4)表示完成任务总时间最短;
式(5)限定在时刻t需要充电的AGV数量不大于充电桩的数量;
式(6)限定每个任务只能被完成一次且都要被完成;
式(7)限定AGV在充电期间不能被分配任务;
式(8)限定当在时刻tAGVv需执行任务k,且电量满足AGVv能完成任务k且能返回充电站l时,AGVv前去执行任务k;
式(9)表示若有AGV前往充电站充电,则在充电的AGV电量达到PU后可结束充电进入工作状态;
式(10)表示若AGV在时刻t能够完成目标任务则无须充电,否则必须前往充电站充电;
式(11)为任务k结束时间。
3算例分析
在求解模型时,根据港口的实际工作状态设定AGV的重载和空载运行速度分别为20、25km/h,在该工作区域有2个岸桥、6个场桥、8辆可用AGV和1000TEU集装箱卸船任务,其中2个岸桥各500TEU集装箱卸船任务。
在AGV进行任务选择时,对各AGV到达各剩余任务起点的执行时间与各任务的紧急程度进行加权。
由于港口实际作业过程中优先考虑任务的紧急程度,且分析得出在α、β取值不同的情况下AGV充电限制对完成任务总时间的影响相同,因此设定α=0.4、β=0.6。
在实际操作过程中,AGV必须预留能够返回充电站的电量,参考文献[2]设定AGV在完成一项任务时至少要保留10%的最低电量使其能够返回充电站。
岸桥与场桥之间的距离见表1,岸桥与场桥之间的任务数量见表2,可用的8辆AGV初始电量见表3。
在求解时将Java作为编程语言,基于Java编程语言面向对象的特性,将模型中的AGV、场桥、岸桥、充电站和任务抽象为实体对象,并以工厂模式创建不同的工厂生产不同的对象实例。
在生产实例时以读取配置文件的方式为不同的实例赋值。
AGV实例创建完后以模型中的算法进行任务接受、执行、完成和充电。
在任务执行期间记录每辆AGV的任务执行时间,当所有AGV都完成任务后再计算用时最长的一辆AGV的用时,即得到完成所有任务所需的时间。
最终得到的完成任务总时间和总充电次数见表4,不同PU值对应的完成任务总时间的具体变化见图3。
从图3可以看出,改变PU能够影响AGV完成所有任务的时间:
当PU在50%~60%范围内取值时,由于总充电次数均为12次,因此当PU取值不断增大时,每辆AGV的充电时间增加,使得完成任务总时间不断增加;
当PU在67%~88%范围内取值时,完成任务总时间较短,且在PU为71%时完成任务总时间最短,比AGV到达充电站一直充至满电再进入工作状态的充电方式耗时少,因此可采用多频次充电的方法对AGV进行合理的充电设置。
上述结果是在α=0.4、β=0.6时计算得出的。
改变α、β的值,得到如图6所示的结果:
随着AGV到达各任务起点的执行时间的权重α的增加(即优先考虑执行近距离任务),完成任务总时间会减少,但对任务的紧急程度满足度较低。
此处是在完成1000TEU集装箱卸船任务的情况下进行分析的,在港口实际工作中可根据实际情况设定任务选择原则。
本文在为AGV选择任务时,既考虑AGV到达各任务起点的执行时间又考虑各任务的紧急程度,综合选择最佳的任务分配方案,避免一味追求時间效率而忽略任务紧急程度的情况,也避免只注重任务优先级而造成AGV效率过低、时间成本费用增加的情况。
对AGV的充电电量设定不同的限制值进行比较,结果表明PU=71%为最佳限制值,可避免AGV在充电站等待时间过长,也使完成任务总时间最短。
4结束语
自动化集装箱码头自动导引小车(AGV)调度问题是影响码头作业效率的重要因素,本文在自动化集装箱码头AGV的调度过程中考虑了AGV的电量续航能力和重空载耗电差异,同时考虑任务的紧急情况和完成任务总时间,比较贴近实际,具有现实意义。
运用Java进行案例分析,结果表明:
采用多频次充电的方法对AGV充电电量设定合理的限制值,既可以减少完成任务总时间又可以提高AGV利用率,并使耗电量减少。
然而,本文未考虑AGV运输过程中的路径冲突问题和充电站的数量问题,且只考虑了完成卸船任务未考虑边装边卸情况,接下来会对此做进一步研究。
参考文献:
[1]谢旦岚,俞海宏,陈靖,等.自动化物流设备充电模式的仿真优化研究[J].系统仿真学报,2017,29(9):
2213-2220.
[2]傅正堂,胡志华,宗康.集装箱码头AGV电量非饱和状态下的调度优化[J].大连海事大学学报,2017,43(3):
58-62.DOI:
10.16411/ki.issn1006-7736.2017.03.010.
[3]荀燕琴.基于群体智能优化的AGV路径规划算法研究[D].长春:
吉林大学,2017.
[4]LIGuangqiang,LIUQi,YANGYawei,etal.AnimproveddifferentialevolutionbasedartificialfishswarmalgorithmanditsapplicationtoAGVpathplanningproblems[C]//Proceedingsofthe36thChineseControlConference,Dalian:
IEEEComputerSociety,2017:
2556-2561.
 升级会员
升级会员 