823 爬升模板Word格式文档下载.docx
《823 爬升模板Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《823 爬升模板Word格式文档下载.docx(34页珍藏版)》请在冰豆网上搜索。
竖向大肋用[8或[10槽钢。
横、竖肋的间距按计算确定。
2)模板的高度一般为建筑标准层层高加100~300mm(属于模板与下层已浇筑墙体的搭接高度,用于模板下端的定位和固定)。
模板下端需加橡胶衬垫,以防止漏浆。
3)模板的宽度,可根据一片墙的宽度和施工段的划分确定,其分块要求要与爬升设备能力相适应。
4)模板的吊点,根据爬升模板的工艺要求,应设置两套吊点。
一套吊点(一般为两个吊环)用于制作和吊运,在制作时焊在横肋或竖肋上;
另一套吊点用于模板爬升,设在每个爬架位置,要求与爬架吊点位置相对应,一般在模板拼装时进行安装和焊接。
5)模板上的附属装置
①爬升装置:
爬升装置是用于安装模板和固定爬升设备的。
常用的爬升设备为捯链和单作用液压千斤顶。
采用捯链时,模板上的爬升装置为吊环,其中用于模板爬升的吊环,设在模板中部的重心附近,为向上的吊环;
用于爬架爬升的吊环设在模板上端,由支架挑出,位置与爬架重心相符,为向下的吊环。
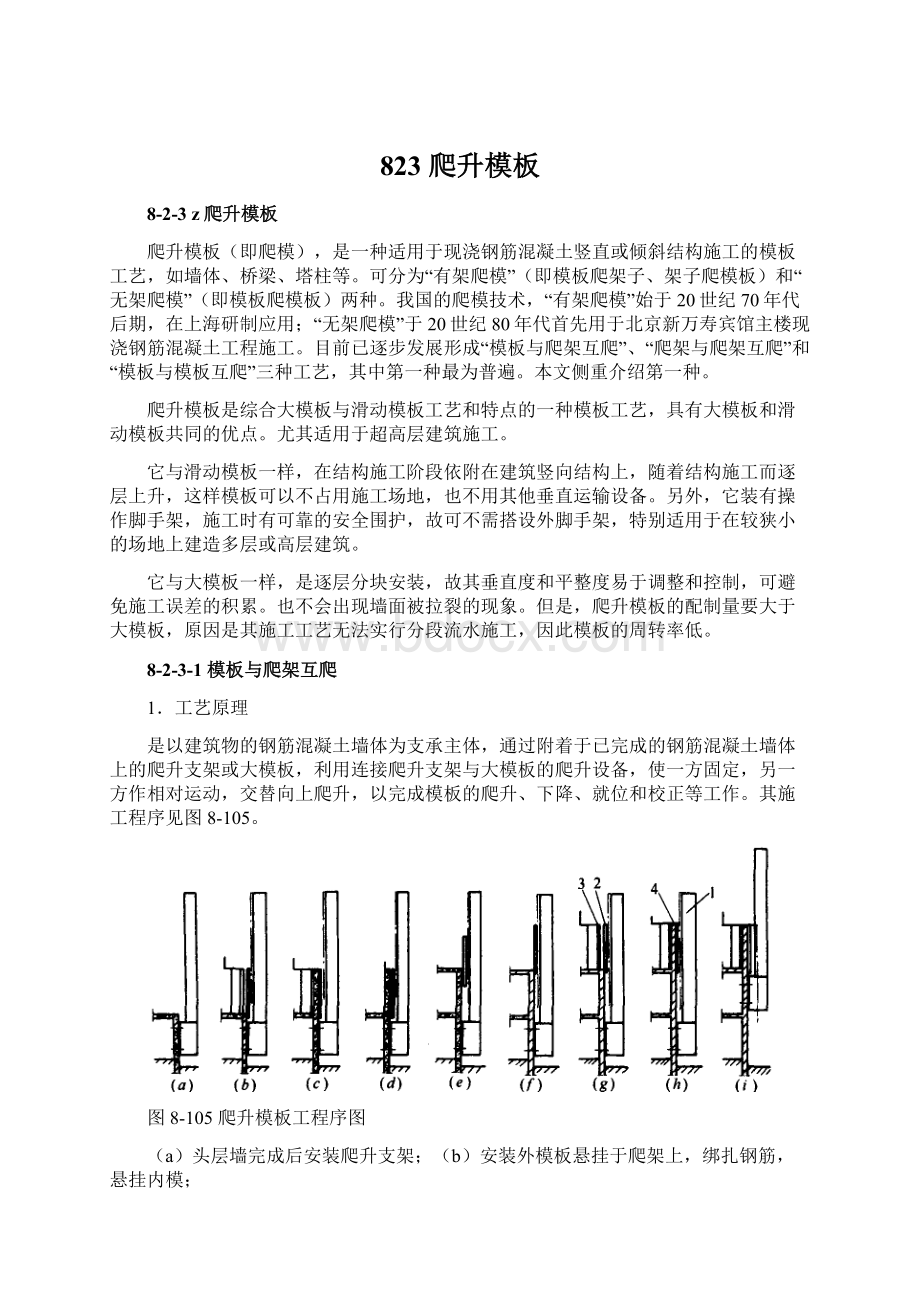
采用单作用液压千斤顶时,模板爬升装置分别为千斤顶座(用于模板爬升)和爬杆支座架(用于爬架爬升),见图8-107。
模板背面安装千斤顶的装置尺寸应与千斤顶底座尺寸相对应。
模板爬升装置为了安装千斤顶的铁板,其位置在模板的重心附近。
用于爬架爬升的装置是爬杆的固定支架,安装在模板的顶端。
因此,要注意模板的爬升装置与爬架爬升设备的装置,要处在同一条竖直线上。
图8-107模板构造图
1-爬架千斤顶爬杆的支承架;
2-脚手;
3-横肋;
4-面板;
5-竖向大肋;
6-爬模用千斤顶;
7-千斤顶底座
②外附脚手和悬挂脚手:
外附脚手和悬挂脚手设在模板外侧(见图8-107),供模板的拆模、爬升、安装就位和校正固定;
穿墙螺栓安装和拆除;
墙面清理和嵌塞穿墙螺栓等操作使用。
脚手的宽度为600~900mm,每步高度为1800mm。
脚手架上下要有垂直登高设施,并应配备存放小型工具和螺栓的工具箱。
在大模板固定后,要用连接杆件将大模板与脚手架连成整体。
③校正螺栓支撑:
是一个可拆卸的校正、固定模板的工具。
爬升时拆卸,模板就位时安装。
在每个爬架上有两组,模板的上、下端各一对。
它用左右旋转螺纹的螺杆组成,一般可用花篮螺丝两端焊上卡具做成。
旋转螺母套,即可将模板的上、下端进行校正、固定。
6)当大模板采用多块模板拼接时,为了防止在模板爬升过程中模板拼接处产生弯曲和剪切应力,应在拼接节点处采用规格相同的短型钢跨越拼接缝,以保证竖向和水平方向传递内力的连接性。
(2)爬升支架
1)爬升支架由支承架、附墙架(底座)以及吊模扁担、爬升爬架的千斤顶架(或吊环)等组成(图8-108、图8-109)。
图8-108液压爬升支架构造图
(a)爬升支架立柱标准节;
(b)爬升支架附墙架(底座)
图8-109液压爬升模板组装图
2)爬升支架是承重结构,主要依靠附墙架(底座)固定在下层已有一定强度的钢筋混凝土墙体上,并随着施工层的上升而升高。
主要起到悬挂模板、爬升模板和固定模板的作用。
因此,要具有一定的强度、刚度和稳定性。
3)爬升支架的构造,应满足以下要求:
①爬升支架顶端高度,一般要超出上一层楼层高度0.8~1.0m,以保证模板能爬升到待施工层位置的高度。
②爬升支架的总高度(包括附墙架),一般应为3~3.5个楼层高度,其中附墙架应设置在待拆模板层的下一层。
③为了便于运输和装拆,爬升支架应采取分段(标准节)组合,用法兰盘连接为宜。
为了便于操作人员在支承架内上下,支承架的尺寸不应小于650mm×
650mm,且附墙架(底座)底部应设有操作平台,周围应设置防护设施。
④附墙架(底座)与墙体的连接应采用不少于4只附墙连接螺栓,螺栓的间距和位置尽可能与模板的穿墙螺栓孔相符,以便于该孔作为附墙架的固定连接孔。
附墙架的位置如果在窗口处,亦可利用窗台作支承。
⑤为了确保模板紧贴墙面,爬升支架的支承部分要离开墙面0.4~0.5m,使模板在拆模、爬升和安装时有一定的活动余地。
⑥吊模扁担、千斤顶架(或吊环)的位置,要与模板上的相应装置处在同一竖线上,以提高模板的安装精度,使模板或爬升支架能竖直向上爬升。
(3)爬升设备
爬升设备是爬升模板的动力,可以因地制宜地选用。
常用的爬升设备有电动葫芦、捯链、单作用液压千斤顶等,其起重能力一般要求为计算值的两倍以上。
1)捯链:
又称环链手拉葫芦。
选用捯链时,还要使其起升高度比实际需要起升高度大0.5~1m,以便于模板或爬升支架爬升到就位高度时,尚有一定长度的起重捯链可以摆动,便于就位和校正固定。
常用捯链的规格,见表8-32。
常用捯链规格表8-32
起重量(t)
0.5
1.0
2.0
3.0
5.0
起重高度(m)
2.5~6
3-6
3~6
注:
起升高度亦可按用户需要向厂家提出要求。
2)单作用液压千斤顶及其他系统
①千斤顶:
可采用穿心式千斤顶,见本手册“15滑动模板施工”。
千斤顶的底盘与模板或爬升支架的连接底座,用4只M14~MI6螺栓固定。
插入千斤顶内的爬杆上端,用螺钉与挑架固定,安装后的千斤顶和爬杆应呈垂直状态,其中:
a.爬升模板用的千斤顶连接底座,安装在模板背面的竖向大肋上,爬杆上端与爬升支架上挑架固定,当模板爬升就位时,从千斤顶顶部到爬杆上端固定位置的间距不应小于1m。
b.爬升支架用的千斤顶连接底座,安装在爬升支架中部的挑梁上,爬杆上端与模板上挑架固定,当爬升支架爬升就位时,从千斤顶到爬杆上端固定位置的间距不应小于1m。
②爬杆:
爬杆采用Q235钢,其直径为φ25mm(按千斤顶规格选用),长度根据楼层层高或模板一次要求升高的高度决定,一般爬升模板用的爬杆长度为4~5m。
由于采用单作用液压千斤顶,因此每爬升一个楼层或施工层后,需将爬杆向下全部抽掉,再重新从上部插入,这样爬杆顶端固定节点的直径应小于25mm,可采用M16螺钉加垫板(图8-110)。
图8-110千斤顶爬杆顶端连接图
1-M16×
60mm螺钉;
2-有垫板的挑架;
3-顶端有M16×
60mm螺孔的φ25mm爬杆
③油路和电路:
a.油路:
爬模爬升一个楼层高度需要千斤顶进行100多个冲程,且是连续进行,因此要求油泵车的速度较快,要按照爬升模板的特点设计制造。
油泵车和千斤顶连接油路图见图8-111。
图8-111单作用液压千斤顶油泵车油路图
当f11电磁线圈通电时,向右吸动阀体杆,打通阀的进油和接出嘴的通路,工作油进人千斤顶,即可发动向上爬升。
当f12电磁线圈通电时,向左吸动阀体杆,打通排油和接出嘴的通路,千斤顶排油;
在中位时,进、排油嘴形成通路,油直接回油箱。
b.电路:
由于爬升一个层高的高度,千斤顶需进、排油100多次,为了减少千斤顶的升差,使进、回油时间最短,使每个千斤顶(特别是负荷最大、线路最远处的千斤顶)进油时的冲程和排油的回程都充分,因此在电路中需要装置一套自动控制线路(图8-112)。
图8-112单作用液压千斤顶自控线路图
K1-油泵电动机启停开关;
K2-电磁换向阀控制开关;
K3-自动线路断开接通开关;
Z1-油泵电动机接触器;
Z2-电磁阀进油接触器;
Z3-电磁阀回油接触器;
Js-时间继电器;
B-电触式压力表
当第一次由手工启动K2,千斤顶负载爬升,冲程终了时油压再次上升,B触点接通启动排油,Js进入计时(检查最远处千斤顶回程是否终了,予以调整),进入千斤顶自动进油、排油程序。
当需要中止或停止时,断开K3,回复手控程序。
3.爬升模板的配置
(1)模板的配置原则
1)尽量做到每间一整块大模板,以便于一次安装、脱模、爬升。
2)外墙内、外侧模板应配足一层的全部用量。
3)外墙外侧模板的穿墙螺栓孔和爬升支架的附墙连接螺栓孔,应与外墙内侧模板的螺栓孔对齐。
4)爬升模板施工一般从标准层开始。
如果首层(或地下室)墙体尺寸与标准层相同,则首层(或地下室)先按一般大模板施工方法施工,待墙体混凝土达到要求强度后,再安装爬升支架,从二层(或首层)开始进行爬升模板施工。
(2)爬升支架的配置原则
1)爬升支架的设置间距要根据其承载能力和模板重量而定。
一般每个爬升支架装有2只液压千斤顶(或2只捯链),每只爬升设备的起重能力为10~15kN,故每个爬升支架的承载能力为20~30kN。
而模板连同悬挂脚手重3.5~4.5kN/m,所以爬升支架间距为4~5m。
2)爬升支架的附墙架宜避开窗口固定在无洞口的墙体上。
如必需设在窗口位置,最好在附墙架上安装活动牛腿搁在窗台上,由窗台承受由爬升支架传来的垂直荷载,再用螺栓连接以承受水平荷载。
3)附墙架螺栓孔,应尽量利用模板穿墙螺栓孔。
4)当墙体混凝土达到一定强度(10N/mm2以上)并拆模后,爬升支架附墙架与墙体预留螺栓孔用螺栓固定,且其位置要与上面各层的附墙架螺栓孔位置处于同一垂直线上。
爬升支架安装后的垂直偏差应小于h/1000(h为爬升支架高度)。
4.爬升模板施工要点
爬升模板施工多用于高层建筑,这种工艺,主要用于外墙外模板和电梯井内模板,其他可按一般大模板施工方法施工。
(1)爬升模板安装
1)进人现场的爬升模板系统(大模板、爬升支架、爬升设备、脚手架、附件等),应按施工组织设计及有关图纸验收,合格后方可使用。
2)检查工程结构上预埋螺栓孔的直径和位置是否符合图纸要求。
有偏差时应在纠正后方可安装爬升模板。
3)爬升模板的安装顺序是:
底座→立柱→爬升设备→大模板
4)底座安装时,先临时固定部分穿墙螺栓,待校正标高后,方可固定全部穿墙螺栓。
5)立柱宜采取在地面组装成整体,在校正垂直度后再固定全部与底座相连接的螺栓。
6)模板安装时,先加以临时固定,待就位校正后,方可正式固定。
7)安装模板的起重设备,可使用工程施工的起重设备。
8)模板安装完毕后,应对所有连接螺栓和穿墙螺栓进行紧固检查。
并经试爬升验收合格后,方可投入使用。
9)所有穿墙螺栓均应由外向内穿入,在内侧紧固。
10)爬模的制作和安装质量要求,见表8-33。
爬升模板的质量要求表8-33
项目
质量标准
检测工具与方法
(一)制作
1.大模板
外形尺寸
-3mm
钢尺测量
对角线
±
3mm
板面平整度
<2mm
2m靠尺,塞尺检测
直边平直度
2mm
螺孔位置
螺孔直径
+1mm
量规检测
焊缝
按图纸要求检查
2.爬升支架
截面尺寸
全高弯曲
5mm
钢丝拉绳测量
立柱对底座的垂直度
1%
挂线测量
量规检查
(二)安装
1.墙面留穿墙螺栓孔位置
穿墙螺栓孔直径
2.模板
拼缝缝隙
<3mm
塞尺测量
拼缝处平整度
靠尺测量
垂直度
<3mm或1‰h
用2m靠尺测量
标高
3.爬升支架
与水平线用钢尺测量
5mm或1‰H
挂线坠
4.穿墙螺栓
紧固扭矩
40~50N·
m
0~150N·
m扭力扳手测量
h和H分别为模板和爬升支架高度。
(2)爬升
1)爬升前,首先要仔细验查爬升设备,在确认符合要求后方可正式爬升。
2)正式爬升前,应先拆除与相邻大模板及脚手架间的连接杆件,使爬升模板各个单元体分开。
3)在爬升大模板时,先拆卸大模板的穿墙螺栓;
在爬升支架时,先拆卸底座的穿墙螺栓,同时还要检查卡环和安全钩。
调整好大模板或爬升支架的重心,使保持垂直,防止晃动与扭转。
4)爬升时操作人员不准站在爬升件上爬升。
5)爬升时要稳起、稳落和平稳地就位,防止大幅度摆动和碰撞。
要注意不要使爬升模板与其他构件卡住,若发现此现象,应立即停止爬升,待故障排除后,方可继续爬升。
6)每个单元的爬升,应在一个工作台班内完成,不宜中途交接班。
爬升完毕应及时固定。
7)遇六级以上大风,一般应停止作业。
8)爬升完毕后,应将小型机具和螺栓收拾干净,不可遗留在操作架上。
(3)拆除
1)拆除爬升模板要有拆除方案,并应由技术负责人签署意见,并向有关人员交底后,方可实施。
2)拆除时要设置警戒区。
要有专人统一指挥,专人监护,严禁交叉作业。
拆下的物件,要及时清理运走。
3)拆除时要先清除脚手架上的垃圾杂物,拆除连接杆件,经检查安全可靠后,方可大面积拆除。
4)拆除爬升模板的顺序是:
拆爬升设备→拆大模板→拆爬升支架
5)拆除爬升模板的设备,可利用施工用的起重机。
6)拆下的爬升模板要及时清理、整修和保养,以便重复利用。
5.其他
1)组合并安装好的爬升模板,金属件要涂刷防锈漆,模板面要涂刷脱模剂。
以后每爬升一次,均要同样清理一次。
尤其要检查下端防止漏浆的橡皮压条是否完好。
2)所有穿墙螺栓孔都应安装螺栓。
如因特殊情况个别螺栓无法安装时,必须采取有效处理措施。
所有螺栓都必须以40~50N·
m紧固。
3)绑扎钢筋时,要注意穿墙螺栓的位置及其固定要求。
4)内模安装就位并拧紧穿墙螺栓后,要及时调整内、外模的垂直度,使其符合要求。
5)每层大模板应按位置线安装就位,并注意标高,层层调整。
6)爬升时,要求穿墙螺栓受力处的混凝土强度在10N/mm2以上。
6.安全要求
(1)爬模施工中所有的设备必须按照施工组织设计的要求配置。
施工中要统一指挥,并要设置警戒区与通信设施,要作好原始记录。
(2)穿墙螺栓与建筑结构的紧固,是保证爬升模板安全的重要条件。
一般每爬升一次应全面检查一次,用扭力扳手测其扭矩,保证符合40~50N·
m。
(3)爬模的特点是爬升时分块进行,爬升完毕固定后又连成整体。
因此在爬升前必须拆尽相互间的连接件,使爬升时各单元能独立爬升。
爬升完毕应及时安装好连接件,保证爬升模板固定后的整体性。
(4)大模板爬升或支架爬升时,拆除穿墙螺栓的工作都是在脚手架上或爬架上进行的,因此必须设置围护设施。
拆下的穿墙螺栓要及时放入专用箱,严禁随手乱放。
(5)爬升中吊点的位置和固定爬升设备的位置不得随意更动。
固定必须安全可靠,操作方便。
(6)在安装、爬升和拆除过程中,不得进行交叉作业,且每一单元不得任意中断作业。
不允许爬升模板在不安全状态下过夜。
(7)作业中出现障碍时应立即查清原因,在排除障碍后方可继续作业。
(8)脚手架上不应堆放材料、垃圾。
(9)捯链的链轮盘、倒卡和链条等,如有扭曲或变形,应停止使用。
操作时不准站在捯链正下方。
(10)不同组合和不同功能的爬升模板,其安全要求也不相同,因此应分别制订安全措施。
8-2-3-2新型导轨式液压爬升模板
新型导轨式液压爬升模板仍属模板与爬架互爬体系,其最大特点是:
爬架在结构施工期间就可以插入装修装饰作业,即爬模爬架联体上升完成结构施工、分体下降进行装修装饰作业,该爬模由北京市建筑工程研究院研制。
见图8-113。
图8-113新型导轨式液压爬升模板工艺流程
(a)墙体混凝土浇筑完毕;
(b)拆模;
(c)提升爬架;
(d)拆卸大模板、安设吊篮提升设备;
(e)上下架体分开
1-大模板;
2-导轨;
3-上架体;
4-下架体
2.构造与组成
新型升降爬模主要由附着装置、导轨、升降爬箱与架体系统、模板系统或作业平台系统、液压升降与控制系统、吊篮设备系统、安全防护系统以及防坠装置等四部分组成(图8-114)。
新型升降爬模主要参数如下:
架体支承跨度≤8m
架体高度9.8~13.5m(随结构层高而定)
架体宽度≤2.25m
模板台车移动距离0.75m
步距1.85~2.7m
步数4~6
作业层数及施工载荷顶层≤1.5kN/m2,中层≤3kN/m2,底层≤1kN/m2
图8-114新型导轨式液压爬模构造示意图
1-平台板;
3-附加背楞;
4-锁紧钩;
5-模板高低调节装置;
6-防坠装置;
7-穿墙螺栓;
8-附墙装置;
9-液压缸;
10-爬升箱;
11-上架体支腿;
12-导轨;
13-模板支撑架体;
14-调节支腿;
15-模板平移装置;
16-上架体;
17-水平梁架;
18-下架体;
19-下架体提升机;
20-栏杆;
21-踢脚板
(1)架体系统
新型升降模板的架体,在竖向主要由上承力架和下承力架组成;
其横向主要由水平梁架及相应的架管等组成。
1)上承力架
上承力架是爬模爬架在竖向的主承力框架,呈三角形结构(用于带模板爬升的装备中)或长方形框架(用于不带模板爬升的装备中)与附墙调节支腿以及上爬升箱轴座等部件组成。
在承力架的两侧组焊有供连接水平梁架用的耳板,在支腿部位设计有供导轨升降用和防止架体倾覆用导向式开口式夹板。
2)下承力架
下承力架是爬架在竖向的次承力框架,它通过销轴悬挂在主承力架的下端。
如同上承力架一样在其两侧设有供连接水平梁架用的耳板。
当下承力架与相应的水平梁架等组装好之后吊挂在主承力架的下端,简称吊篮挂架。
3)水平梁架
在新型升降模架的横向,位于相邻竖向承力架之间的内外两边分别设有桁架式水平梁架,通过钢管扣件连接在一起,并在相应的位置铺设有腿手板。
根据承力架的高度和使用要求可设有多道水平梁架,水平梁架又称横向架体梁架。
(2)模板系统或作业平台系统
坐落在三角支承架上面的模板系统由新设计的无背楞大模板和相应的模板支承装置、高度调节装置、垂直调节装置以及模板水平移动小车等组成。
对于不带模板爬升的爬模爬架,在主承力架上面安装由竖向析架、横向水平梁架等组成的作业平台系统。
(3)吊篮设备系统
吊篮设备系统是爬架的下架体作为吊篮挂架使用时在主承力架下部安装的吊篮设备及相应的控制系统,主要包括吊篮提升机、滑轮、钢丝绳、安全锁等。
(4)附着装置
既是新型升降模架附着在建筑工程或构筑工程结构上的承力支座,又是新型升降模架升降时的导向装置和防倾覆装置。
当附着的建筑结构厚度较小时,在建筑结构内使用预埋钢套管;
当附着的结构厚度较大时,在混凝土结构内预埋套件和使用相应的部件。
(5)导轨与升降爬箱
升降用的导轨为H型钢,其长度大于两个标准楼层或相邻两个楼层的高度,H型钢顶部的内侧面上组焊有带有斜面的钩座,H型钢外侧面上组焊有爬升箱升降用的支承块(踏步块)和导向块,支承块或导向块相互之间的距离与行程相匹配。
升降用的爬升箱分为上爬升箱和下爬升箱,主要由箱体、凸轮摆块(承力块)、导向轮以及定位锁、连接销轴等部件组成。
(6)防坠装置
按照附着式升降脚手架的有关规定与要求,新型升降模架的防坠装置是采用预应力锚夹具技术设计的,主要由配套的锚座、锁座、钢铰线及护管组成。
防坠装置上端为固定端,安装在提升导轨上端部;
锁紧端固定在主承力架主梁端部,在为主承力架相对于提升导轨下降时,弹簧推动夹片楔紧钢绞线,使主承力架相对于提升导轨停止下坠,提升导轨上分别有上下两个挡块与上下两个附着支座锁紧,可保证提升导轨与墙面连接可靠,确保安全。
(7)液压升降设备与控制系统
新型升降模架升降用的动力设备,主要由液压油缸与相应的泵站组成。
安装在上下爬升箱之间的液压油缸为可拆卸的便携式油缸,油缸设有双向液压锁,液压泵站可以是便携式泵站也可以是集中式泵站。
升降用的控制系统有两种:
一种是手动控制系统,另一种是由可编程控制器组成的自动控制系统。
(8)安全防护系统
按照高空安全操作与作业要求,在架体相应的作业平台部位设置有坚固耐用的钢脚手板或木脚手板,并设置了相应的护栏、护杆、防护板和安全网等安全防护装置。
3.技术特征
与现有的爬模、爬架相比,新型升降模架具有以下主要的技术特性:
(1)组合分体式架体系统,构思新颖、构造简单、受力明确、功能较多。
如图8-114所示,新型升降模架的架体由三个层次的架体或由三部分的架体组成:
①主承力架(上承力架)和相应的水平梁架等组成的主架体(上架体)系统(上架体系统);
②在主承力架下部吊挂的次承力架(下承力架)与相应的水平梁架等组成的下架体(吊篮架)系统;
③在主架体的上面是模板系统或上部作业平台系统。
在结构施工期间,下架体系统通过销栓吊挂在上架体的下边并与上架体联为一体,随上架体的爬升而爬升,即爬架架体联体爬升;
当建筑工程施工到一定高度而下部的结构需要进行装修装饰作业时,可安装吊篮设备系统使爬架的下架体作为吊篮架与上架体分开,即爬架架体分体下降,以满足下部结构提早进行外装修装饰作业的使用要求。
同时,在首层结构施工时就可先行安装上架体而暂不安装下架体,这样可以及早投入使用,待具备安装下架体部件时再安装使用。
此外,在不需要安装下架体就能满足施工需要时,仅安装上架体和上部作业平台系统或模板系统就可以投入使用了。
从而,使架体系统更加简单与适用。
(2)具有附着、导向和防倾覆的多功能附着装置。
附着装置是直接与工程结构连接并承受和传递新型升降模架的全套设备自重及施工荷载和风荷载的附着固定装置,同时又是导轨及架体升降时的导向装置和防倾覆装置。
附着装置与墙体连接见图8-114。
(3)坚固耐用的导向升降装置和自动爬升的互爬技术。
在强度高、刚度大的H型钢导轨上组焊有坚固可靠的导轨钩座和坚固可靠的供爬升箱升降用的踏步承力块和导向板,带有凸轮摆块并能自动复位的爬升箱附着在H型导轨上,并通过上爬升箱顶端的连接轴与架体的主承力架有机地联为一体,导轨和爬模爬架通过上
 升级会员
升级会员 