构TIN法填挖方计算方法研究Word文档下载推荐.docx
《构TIN法填挖方计算方法研究Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《构TIN法填挖方计算方法研究Word文档下载推荐.docx(26页珍藏版)》请在冰豆网上搜索。
()(其中?
A’B’C’的面积S=[XY-Y+XYAB’’C’ABCBC
)()+XY-Y]/2。
Y-ACAB
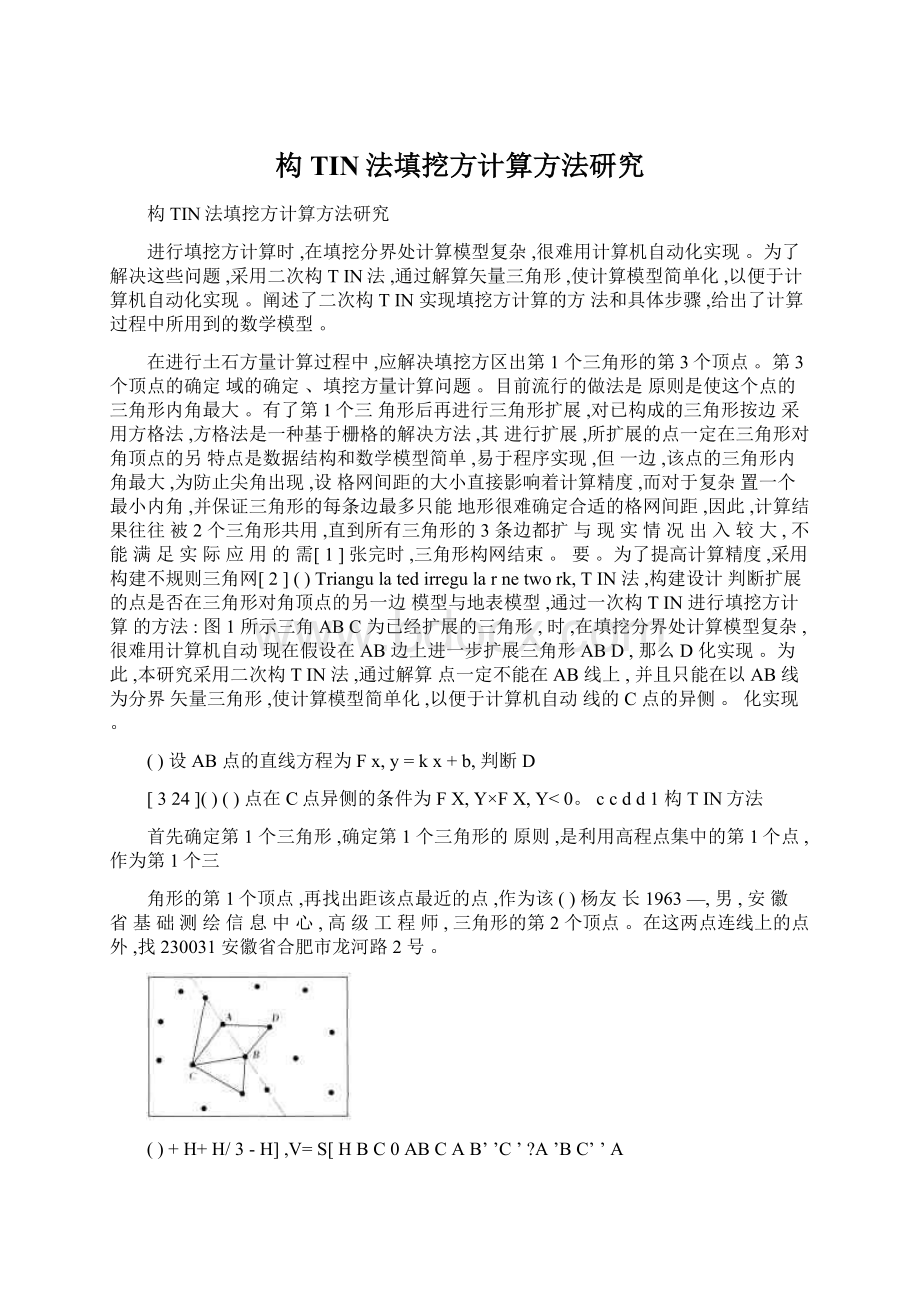
图1构TIN方法
2计算方法与数学模型
为了便于叙述,以下把施工前的TIN模型称为
现实模型,施工后的TIN模型称为设计模型。
本研
()究考虑设计范围内任意多边形计算范围线填挖方的计算问题。
计算范围线应在设计模型和实际模图2体积计算型范围内,现实模型范围应涵盖设计模型。
棱柱体的高度为C点相对于基准面的高度,即
填挖方计算,实际上是计算设计模型与现实模C点高程与基准面高程之差,棱锥体的高度为C’点型在空间上的差异。
计算思想是先通过第1次构建到A’B’的垂直距离。
现实模型和设计模型,求出设计模型与现实模型的2.22次构模
交线,在交线与计算范围线之间确定填挖方区域;
由在进行填挖方计算时需要进行2次构模。
第1于在填挖方区域的边缘地带,第1次构网的模型一次构模有2个目的,一是求出计算范围线与设计模定会有三角形跨越区域的现象存在,即在填挖方区()型和现实模型的交点以下简称范围线交点,二是域内有多边形存在,为了使计算模型简单,使填挖方(求出现实模型与设计模型的交点以下简称模型交区域仅由三角形构成,没有三角形跨越现象存在,通)(点,并在交点的基础上求出交点串即交线填挖分过模型间交点,使跨越三角形重新构建完成第2次)界线。
第2次构模是在第1次构模的基础上,使范构模。
完成第2次构模后,按填挖方区域计算同一围线交点和模型交点参与构模,当现实模型和设计
(基准面基准面高程小于区域范围内两模型高程最模型的三角形内有范围线交点和模型交点时,该三
)小值之上设计模型与现实模型的体积,并计算模角形将被由范围线交点、模型交点及三角形原顶点型间体积差。
由于填挖方区域仅由具有高程信息的()所构成的三角形取代图3,当三角形内无范围线三角形组成,因此填挖方区域内的模型体积等于各交点和模型交点时,三角形保持原状。
斜三棱柱体体积之和。
当设计模型的体积小于现实
模型的体积时,表明该区域为挖方,否则为填方。
2.1斜三棱柱体积计算
在填挖方区域内,对于现实模型与设计模型的
体积计算,其最小计算单元为斜三棱柱体,斜三棱柱
图3重构三角形体积计算如图2所示。
图中ABC为模型中的一个
2.3交点的求法三角形,C点为三角形高程最低点,?
AB’’C为’?
ABC
在进行第2次构模时,需要在一次构模的基础上在基准面上的投影,A″、B″为过C点的水平面与A、B
求出范围线多边形柱体与设计模型和现实模型间的投影线的交点,从图中可看出斜三棱柱体是由直三
()交线及设计模型和现实模型间的交线填挖分界线,棱柱体与四棱锥体的组合,因此斜三棱柱体积计算
交线由交点串组成,交点坐标用下列方法求得。
公式如下:
2.3.1范围线交点的求法V=V+VABCAB’’C’A″B″CAB’’C’ABB″A″C
图4所示123线为计算范围线,ABC为范围线()(若A、B、C的坐标分别为X,Y,H、X,Y,AAABB
上方的三角形,4、5号点为范围线与BC、AB投影线)()H、X,Y,H,基准面高程为H时,上述公式可BCCC0
B’C、’AB’’的交点,4、’2、’5’号点分别为4、2、5号点向三进一步推导为
总第385期金属矿山2008年第7期
角形ABC的投影点即为所求点。
则三角形实交有2个交点时,有2种相交方式,如
())()(=X=C-C/K-K,Y=Y=图5所示。
图5a为三角形ABC的2条边AB、X521125’5222225’
)-K()(B与三角形ABC面形成2个交点,即同一三角CKC-KC/K22211112211
()H()形的2条边同时与另一三角形面实交;
图5b为三=D-AX-BY/C,X’=X,Y’=Y,5’552222
()=D-AX-BY/C,4号点坐’标的求法与角形ABC的AC边与三角形ABC面形成1个H22333334442’
交点,三角形ABC的BC边与三角形ABC面5’号点相同不再重复。
44444333
()()(=Y-Y/XX,K=Y形成交点,即2个三角形的一条边互与对方三角形式中,K--BABA221
)()面相交。
因此,要求两三角形之间的交线,实际上是Y/X-X,121
求三角形的某一边与另一三角形面的交点,有了2C=Y-KX,C=Y-KX,1A1A2121
)()()((YHHYYH----A个交点就形成了交线。
如图6所示ABC为设计模型=Y-BCBCBAA
)()()(H,2或现实模型中的三角形,12为现实模型或设计B
B)()XH-模型三角形的一条边线,P点为相交点,则P点坐()()(----=XXHHXBCCBABA
())3标为H,B)(C)()(-XY-(()=-XY-Y-XH=[D+AHm+BHn/p-AX-XBAABCBCP111
())4,Y()BY]/[A+B/p+C],B1
()D()()+BY+CH15XH-Hm/p+X,Y=H-Hn/p==AXBBPBP11PP12号点与三角形AB’’C’实交的判别式为:
S=+Y,?
AB’’C’1
S+S+S,5号点与A’B线’段实交的判别=X-X,n=Y-Y,p=H-H,A、B、式中,m?
A’2B’?
A2’C’?
B2’C’212121
()()()()D=D+D。
C、D的定义与2、3、4、5式相同。
两三角式为AB’’A’2B2’
形面相交时另外一个交点的求法与此相同,不再重
复介绍。
当求出一对三角形面相交的两个实交点
后,再生成由两点组成的相交线段及填挖线段。
图5实交方式
图4范围线交点计算
2.3.2模型交点的求法模型交点实际上是现实模
型与设计模型三角形
面之间的两两相交后形成交线的端点。
2个三角形
面之间的空间关系不是平行就是相交。
相交的情况
分为实交和虚交2种,虚交指的是交线在相交三角
形之外,实交指的是交线在2个相交三角形之内,虚图6模型交点计算交的情况没有实际意义,在计算交点的过程中予以当P点在三角形ABC范围内,并且在12线段之舍弃,实交予以保留。
两个三角形间的实交,不是1间时为实交,否则为虚交。
实交的判别方法为S+?
APB个交点,就是2个交点,2个交点就形成了交线,由+D=D。
S+S=S并且DP212?
BPC?
APC?
ABCP1于模型的连续性,因此交线也一定是连续的,故当三2.4填挖区的生成
角形间实交只有1个交点时,可予以舍弃,因为1个所有填挖线段生成后,按相邻线段端点坐标相
交点一定是相邻交线的端点。
同原则,追踪所有线段,将填挖线段连为一体,生成
填挖线折线。
在计算区域内生成的填挖线折线有22.6.1平整后的场地高程计算种情况,一种是开折线,一种是闭合折线。
由于模型假设现实模型具有n个地表三角形构成,计算
()的连续性,开折线首尾一定与计算范围线相连,因此基准面高度为H不大于现实模型的最小高度,V0i填挖区将有2种形式组成,一种是计算范围线与开为基准面以上第i个地表三角形所围成的斜三棱柱折线间生成的填挖区,一种是闭合折线生成的填挖体的体积,平整后场地水平面高程为H,计算范围面
区。
填挖区相邻区域,填方、挖方特性互异。
如图7积为S,则根据填挖方相等原则,如下等式成立:
n所示,若?
区为填方,则?
区为挖方,?
区为填方。
()V=SH-H,i0?
i=1n
()因此H=V/S+H,V的计算公式见1式。
i0i?
i=1
2.6.2填挖分界线的确定
此时的填挖分界线,实际上就是由若干条高程
为H的等高线组成,该分界线也是高程为H的水平
面与地表三角形相切后留下的切线,换句话说该分
界线是高程为H的水平面与地表三角形2条边实交图7填挖区生成
点的连线组成。
2.5填挖方计算
设地表三角形ABC的2点A、B的坐标分别为在计算第i区填挖方时,先确定i区的计算基准
()()X,Y,H、X,Y,H,平整后水平面高程为AAABBB面,基准面的高程应不大于区域内设计模型和现实
()H,则线段AB与该水平面的交点P的坐标X,Y,Z模型的最小高程。
NN为pifi
VV,VV,==()()()X=H-HX-X/H-H+X,Y=pipijfifijABABAA?
?
j=1j=1fi()()()H-HY-Y/H-H+Y,Z=H1ABABAA
ΔV=V,V=V-V,ipiifipi?
判断是否实交的方法:
j=1
当D+D=D时,P点为实交点;
当D+APBPABAP式中,N为设计模型第i区三角形个数;
N为现实pifi
>
D时,P点为虚交点。
DAB模型第i区三角形个数;
V为设计模型中第i区第jBPpij
3结论个斜三棱柱的体积;
V为现实模型中第i区第j个斜fij
用二次构TIN法进行填挖方计算时,要解决的()三棱柱的体积,其计算公式参见1式;
V为设计pi
主要问题是TIN的构建、填挖分界线的生成、填挖区模型中第i区内基准面以上所有斜三棱柱体的体积
之和;
V为现实模型中第i区内基准面以上所有斜域的确定和斜三棱柱体体积的计算。
第1次构TINfi
Δ三棱柱体的体积之和;
V为第i区现实模型的体积i主要目的是计算填挖分界线和确定填挖区域;
第2
Δ与设计模型的体积之差,当V为正值时,表明第ii次构TIN是在第1次构TIN的基础上,解决三角形Δ区为挖方,当V为负值时,表明第i区为填方。
i跨越填挖区域的问题,使填挖方计算简化成只对本
2.6平整后场地水平的填挖方计算区域内由三角形构成的斜三棱柱体体积的计算,从
场地平整有2种情况:
一种情况是平整后场地而使计算模型简单化,便于计算机自动化实现。
道路通行能力是指在特定的交通条件、道路条件及人为度量标准下单位时间能通过的最大交通量。
在道路建设和管理过程中,如何确定道路建设的合理规模及建设时间,如何科学地进行公路网规划、项目可行性研究、道路设计以及道路建设后评价,如何知道道路网的最优管理模式,都需要以道路通行能力系统研究的成果为依据。
本文对道路与交叉口的通行能力计算方法进行简单的探讨。
一、道路路段通行能力
1、基本通行能力
基本通行能力是指道路与交通处于理想情况下,每一条车道(或每一条道路)在单位时间内能够通过的最大交通量。
65m,路旁的侧向余宽作为理想的道路条件,主要是车道宽度应不小于3.
不小于1.75m,纵坡平缓并有开阔的视野、良好的平面线形和路面状况。
作为交通的理想条件,主要是车辆组成单一的标准车型汽车,在一条车道上以相同的速度,连续不断的行驶,各车辆之间保持与车速相适应的最小车头间隔,且无任何方向的干扰。
在这样的情况下建立的车流计算模式所得出的最大交通量,即基本通行能力,其公式如下:
其中:
v———行车速度(km/h);
t0车头最小时距(s);
l0———车头最小间隔(m);
lc———车辆平均长度(m);
la———车辆间的安全间距(m);
lz———车辆的制动距离(m);
lf———司机在反应时间内车辆行驶的距离(m);
l0=lf+lz+la+lc。
2、可能通行能力
计算可能通行能力Nk是以基本通行能力为基础考虑到实际的道路和交通
确定其修正系数,再以此修正系数乘以前述的基本通行能力,即得实际道状况,
路、交通与一定环境条件下的可能通行能力。
影响通行能力不同因素的修正系数为:
1)道路条件影响通行能力的因素很多,一般考虑影响大的因素,其修正系数有:
?
车道宽度修正系数γ1;
侧向净空的修正系数γ2;
纵坡度修正系数γ3;
视距不足修正系数γ4;
沿途条件修正系数γ5。
2)交通条件的修正主要是指车辆的组成,特别是混合交通情况下,车辆类型众多,大小不一,占用道路面积不同,性能不同,速度不同,相互干扰大,严重地影响了道路的通行能力。
一般记交通条件修正系数为γ6。
于是,道路路段的可能通行能力为
tocorrectingmisunderstandingsadvocategoodcadrestyle.2,tocarryoutthe"
double"
ofhumanactivities.Bangkunwillimplement"
onthein-depthdevelopmentofthegrassroots,thepeopletoworry,notificationonthenormalizationofpromotingharmonyactivities,makingthedoubleworkinnovationsystem,thedemandsofthemassesreflectbackchannels,helpenterprisestosolvepracticalproblemsasmuchaspossible.3,visit
Nk=Nmaxγ1γ2γ3γ4γ5γ6(辆/h)
3、实际通行能力
实际通行能力Ns通常可作为道路规划和设计的依据。
只要确定道路的可能通行能力,再乘以给定服务水平的服务交通量与通行能力之比,就得到实际通行能力,即
Ns=Nk×
服务交通量?
通行能力(辆/h)。
二、平面交叉口的通行能力
两条或两条以上的道路在同一平面相交称为平面交叉,两条不同方向的车流通过平交路口时产生车流的交叉,平交路口可能通过此相交车流的最大交通量就是平面交叉口的通行能力。
平交路口的通行能力不仅与交叉口所占面积、形状、入口引道车行道的条数、宽度、几何线形等物理条件有关,而且受相交车流通过交叉口的运行方式、交通管理措施等方面的影响,因此,在确定通行能力时,要首先确定交叉口的车辆运行和交通管理方式。
平面交叉口一般可分为三类:
一类为不加任何交通管制的交叉口,一类为中央设岛的环形交叉口,一类为设置色灯控制的信号交叉口。
1、无信号机控制交叉口的通行能力
不设信号机的交叉口大致可分为两大类:
一是暂时停车或让行方式,一是环形方式。
1)暂时停车或让行方式交叉口通行能力的计算方法
根据可插间隙理论,直接计算优先方向交通流中的可插间隙(车头时间间隔),即非优先方向交通可以横穿或插入的间隙数,作为非优先方向可以通过的最大交通量。
其计算原理是将主干道上的车流视为连续行驶的交通流,并假定车辆到达的概率分布符合泊松分布,则车辆之间出现的间隔分布为负指数分布,但不是所有间隔均可供次干道车辆通过或插入,只有当此间隙大于临界界限α时才有可能。
其次,当出现可插间隙时,次要方向的车流可以相继通过的随车时距为β,推导出下列最简单公式:
式中:
Qf———非优先的次干道上可以通过的交通量(辆/h);
Qy———主干道优先通行的双向交通量(辆/h);
q———Qy/3600(辆/h);
2)环形交叉口的通行能力
环形交叉口是在几条街道相交的交叉口中央,设置圆岛或带圆弧形状的岛,使进入交叉口的所有车辆均以同一方向绕岛行驶,其运行过程一般为先由不同方向汇合,接着在同一车道先后通过,最后分向驶出,可避免直接交叉、冲突和大角度碰撞,其实质为自行调节的渠画交通型式。
其优点为车辆可以连续行驶,安全,无需管理措施,平均延误时间短,很少刹车、停车,节约用油,噪音低,污染少等等。
缺点为占地大,绕行距离长,当非机动车和行人过多及有直向行驶的电车时不宜采用。
环形交叉口按其中心岛直径的大小分为三类:
常规环形交叉口、小型环形交叉口、微型环交。
以常规环交为例来计算通行能力,常规环交亦称传统型环交,tocorrectingmisunderstandingsadvocategoodcadrestyle.2,tocarryoutthe"
其中心岛为圆形或椭圆形,直径一般在25m以上,交织段长度和交织角大小有一定的要求,入口引道一般不扩大成喇叭形,现在我国各城市的主要环交均属此类。
在常规环交的通行能力计算中较著名的和使用较广泛的公式沃尔卓普公式:
Qm———交织段上最大通行能力(辆/h);
l———交织段长度(m);
W———交织段宽度(m);
e———环交入口引道平均宽度(m);
P———交织段内进行交织的车辆与全部车辆之比,以百分率计。
2信号交叉口机动车的通行能力
信号交叉口是由红、黄、绿三色信号类组成,用以指挥车辆的通行、停止和左右转弯,随信号灯的变换使车辆通行权由一个方向转移给另一个方向,根据信号周期长度及每个信号相位所占时间的长短,可以计算交叉口的通行能力。
大、中城市街道交通繁忙的平面交叉口一般都设置信号灯管制交通,因此,信号交叉口的通行能力与信号控制设计有密切关系。
交叉口是两条以上道路相交的区域,车辆于此通过路口,转换方向,其运行路线必然相互交织或交叉,加上由色灯信号控制指挥车辆前进、停止或改变方向,这就不可避免地要减速、制动、停车或起动、加速、转向,
 升级会员
升级会员 