欧姆龙PLC使用和PID指令使用.docx
《欧姆龙PLC使用和PID指令使用.docx》由会员分享,可在线阅读,更多相关《欧姆龙PLC使用和PID指令使用.docx(21页珍藏版)》请在冰豆网上搜索。
欧姆龙PLC使用和PID指令使用
欧姆龙学习总结
1、软件安装:
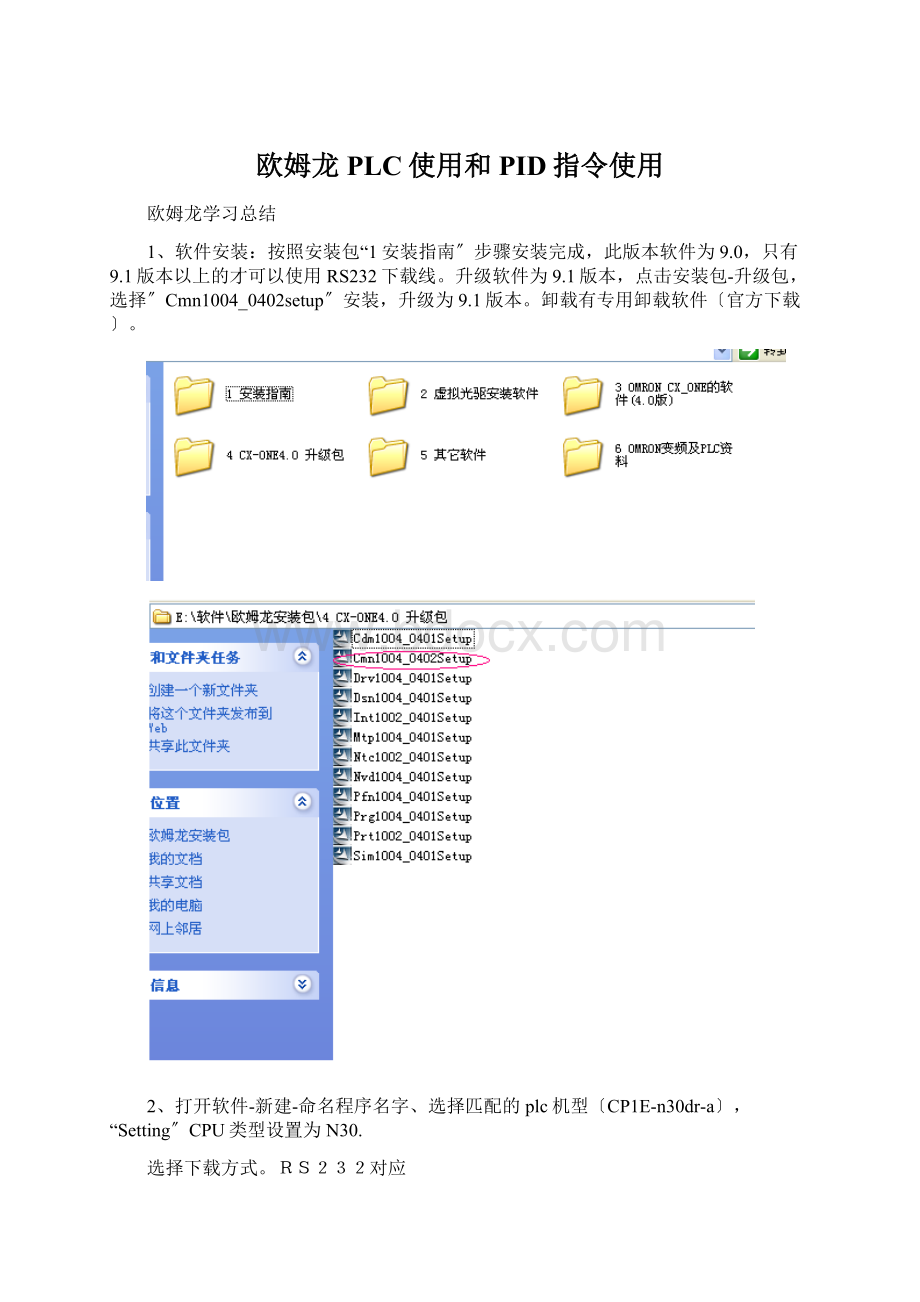
按照安装包“1安装指南〞步骤安装完成,此版本软件为9.0,只有9.1版本以上的才可以使用RS232下载线。
升级软件为9.1版本,点击安装包-升级包,选择〞Cmn1004_0402setup〞安装,升级为9.1版本。
卸载有专用卸载软件〔官方下载〕。
2、打开软件-新建-命名程序名字、选择匹配的plc机型〔CP1E-n30dr-a〕,“Setting〞CPU类型设置为N30.
选择下载方式。
RS232对应
NetworkType设置为“SYSMACWAY,〞.
3、PID于PIDAT指令介绍
1.PID指令/PID自动整定控制指令PID(190)/PIDAT(191)
PID是由比例运算(P)、积分运算(I)和微分运算(D)共同组合作用的简称。
其中,比例作用是建立在设定值〔SV〕上的比例带操作,在此带内控制变量〔MV〕与偏差成正比,提供一个无振荡的平滑控制过程;积分作用是指对阶跃偏差的自动校正过程;比例作用和积分作用都通过控制结果进行校正,因此不可避免会产生响应滞后。
微分作用弥补了这一缺陷,通过操作变量与偏差形成的斜坡〔微分系数〕成比例来进行控制,可加速对干扰的响应。
〔1〕PID控制指令PID(190)
PID(190)指令的梯形图如图3-72所示。
图中,S为输入字〔即输入PV值〕;D为输出字〔即控制变量输出MV值〕,S和D均为16位无符号的二进制数〔0~FFFFH〕或十进制数〔0~65535〕;C为参数字,具有2个自由度PID控制的参数C共有39个字,其中C~C+8的9个字由用户来设置,C+9~C+38的30个字为指令工作区,用户不能占用。
该指令根据C中设定的参数实现PID控制。
当执行条件为ON时,PID(190)按照C中设置的参数(设定值,PID常量等)在两个自由度上对目标值执行PID控制,从输入字S的内容中得到指定输入的数据,并根据设定参数执行PID计算,并将计算结果以操作变量的形式存入输出字D中。
图3-72PID指令的梯形图
PID指令的应用关键是用户要设置好PID的9个控制字。
其中,C字为设定值〔SV〕。
C+1字用于设置比例带,由用户在整定时确定,取值X围为0001~270FH〔或十进制数1~9999〕。
C+2字用于积分时间设置,由用户在整定时确定,取值X围为0001~1FFFH〔或十进制数1~8189〕。
C+3字用于微分时间设置,由用户在整定时确定,取值X围为0000~270FH〔或十进制数0~9999〕。
C+4字用于采用周期设置,由用户在编程时确定,取值X围为0000~270FH〔或十进制数0~9999〕,单位为0.s。
C+5字用于设置4个参数,00位用于设定比例的作用方向,为0时正向,为1时,反向;01位用于修改PID参数的设定,为0时PID参数只在执行条件的上升沿时修改,即PID在执行过程中不能修改,为1时PID参数字指令开始执行时修改;03位用于控制输出变量设定,由用户在编程时确定,为0输出0%,为1输出50%;04~15位用于滤波系数设定,由用户在整定时确定,取值只能是二进制数,X围为100~163H;2位不用。
〔举例说明:
00位说明,输入值小于设定值时,为反向与为1;输入值大于设定值为正向与为0。
03位只有P调解时使用。
〕
C+6字也是有4个参数设置,00~03位用于设定输出数据的位数,0是8位,1是9位,依次类推,8是16位〔最多〕,04~07位为积分和微分单位设定,1是采样周期倍数,9是单位时间为100ms;08~11位是输入数据位数设定,0~8对应8到16位数据;12位用于对输出控制变量是否要加限位,为0无限位,为1有限位;13~15位不用。
、
〔举例说明:
现有模拟模块型号为CPM1A-MAD02-CH输入、输出分辨率为8位,与输入输出为8位,具体见“CPM1A-MAD02-CH〞手册,因此00-03位为0,08-11位为0。
〕
C+7用于输出变量的下限设定,当C+6的12位设定为1时该字的设定才有效,设定X围为0000~FFFFH。
C+8用于输出变量的上限设定,当C+6的12位设定为1时该字的设定才有效,设定X围为0000~FFFFH。
对于缺乏实际编程经验的用户来讲,使用PID来进行参数整定很繁复。
因此,若使用PIDAT自整定控制指令,将给用户的使用提供简便方法。
〔2〕PID自整定控制指令PIDAT(191)
PIDAT(191)指令的梯形图如图3-73所示,它与PID(190)梯形图的含义大致相同,不同的是PLC可根据需要自动计算P、I、D参数,并实现PID控制。
S为输入字,D为输出字,C为参数字。
参数C的设置含义从C~C+40,其中C~C+10的11个字需要用户设置,其余C+11~C+40的30个字为指令工作区,用户不可占用。
图3-73PIDAT指令的梯形图
对于PIDAT(191)指令参数区中用户需要设置的11个字,前9个字C~C+8的设置和上述PID(190)指令的设置相同,只是PID参数〔即C+1~C+3〕可以不设而由自整定功能自动设置。
〔区别〕因此,下面简要介绍C+9字~C+10字的参数设定。
C+9为自整定参数设定。
其中,00~11位为自动计算增益,取值X围为001~3E8H或十进制数1~100,单位是0.01。
因此,自整定增益X围为0.01~10.00,默认值为000H,对应增益为1.00。
15位为自整定命令,当15位的状态由OFF变为ON〔上升沿〕时,开始执行自整定操作;当15位的状态由ON变为OFF〔下降沿〕时,则停止自整定操作。
12~14位不用。
C+10为限制周期迟滞。
〔这是PID和PIDAT的主要区别之一〕
在每一个周期自动检查C+9命令(15)位的状态。
当该位为上升沿时,PIDAT(191)开始自动调整PID参数。
PIDAT(191)强制使控制变量发生变化(最大值控制变量←→最小值控制变量),监视控制系统的特性。
从检测特性中自动计算出PID参数,新的P、I和D参数自动存储到C+1,C+2和C+3中。
此时,自动命令位变为下降沿,在C+1,C+2,C+3中,用新的参数恢复PID控制。
在PIDAT(191)执行期间,如果自动调整命令位为ON,PIDAT(191)中断用户设置常数的PID控制,完成自动调整,然后用计算好的PID常数恢复PID控制。
关于PID控制指令更详细资料与其应用示例,请见《可编程序控制器过程控制技术》有关内容。
PIDAT自整定需要外部信号重复周期一般在两三次后才能自整定结束。
4、模拟量的使用说明
CPM1A-MAD02-CH
模拟量输入/输出单元
外部端子分布图:
1、输入端子
2、输出端子
产品规格
输入
通道数
4
输入信号X围
0~10V
1~5V
4~20mA
分辨率
0~10V
8位
1~5V
8位
4~20mA
8位
输入形式
差动输入
输入阻抗
电压输入
1MΩ
电流输入
250Ω
最大输入信号
电压输入
±15V
电流输入
±30mA
输出
通道数
1
输出信号X围
-10~10V
0~10V
4~20mA
分辨率
-10~10V
9位
0~10V
8位
4~20mA
8位
最大输出电流
电压输出
5mA
最大负载阻抗
电流输出
350Ω
总输出电流
21mA
共有
精度
±1.0%(满量程)
隔离方式
模拟量输入、输出端子之间
无隔离
模拟量输入/输出端子和CPU之间
DC500V
转换速率
最大十毫秒一个单元(见注)
外部连接端子
两个14脚端子台(不可拆卸)
电流消耗
5V最大60mA
(CPM×A5V最大提供150mA)
24V最大80mA
重量
最大250g
尺寸
86(W)×50(H)×90(D)mm
注:
这个时间是指整个模块的输入输出完成一次刷新所需要的时间。
⏹只要总电流小于或等于21mA,电压输出和电流输出可以同时使用。
⏹启动电压或电流输出时,写入输出通道的数据有效。
⏹启动电压或电流输入时,从输入通道读数据有效。
⏹不用的输入回路,将其电压输入端子短接。
输入/输出X围设置
设置字〔“MAD02-输出通道n〞+“1〞〕
位
7
6
5
4
3
2
1
0
输入4
输入3
输入2
输入1
启动
量程
启动
量程
启动
量程
启动
量程
设置字〔“MAD02-输出通道n〞+“1〞〕
位
15
14
13
12
11
10
9
8
不使用
输入4
输入3
输入2
输入1
输出1
1
1
平均值
启动
量程
设定值
项目
内容
输入
量程
0:
0~10V1:
1~5V/4~20mA
启动位
0:
不使用1:
使用
平均值
0:
不使用1:
使用
输出
量程
0:
0~10V/4~20mA1:
-10~+10V/4~20mA
启动位
0:
不使用1:
使用
注:
设定通道只能用于量程设定,不能作它用。
通道分配
CPU
输出1
输入4
输入3
输入2
输入1
30CDR
12CH
低八位
03CH
高八位
03CH
低八位
02CH
高八位
02CH
低八位
40CDR
12CH
低八位
03CH
高八位
03CH
低八位
02CH
高八位
02CH
低八位
输入通道的IR位分配
“输入通道1〞
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
d
d
D
d
d
d
d
d
d
d
d
d
d
d
d
d
输入2
输入1
“输入通道1〞+1
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
d
d
D
d
d
d
d
d
d
d
d
d
d
d
d
d
输入4
输入3
输出通道的IR位分配
输出通道
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
S
×
×
×
×
×
×
×
d
d
d
d
d
d
d
d
不使用〔0〕
输出1数据位
S:
符号位
0:
正电压输出
1:
负电压输出
注:
只有当使用±10V量程时,符号位才有用。
输出接线图
输入接线图
数据转换
输出
输入
5、
举例1:
用PID指令控制模拟量输入为4-20mA,输出为0-10V。
写入指令如图
举例2:
用PIDAT指令实现0-10V输入,0-10V输出。
6、软件操作注意事项
1、每个网络只能写一条语句,
如图最左侧有网络分隔栏
2、编译下载监视程序修改
编译:
点击程序-编译如图〔或点击快捷方式〕
下载:
点击PLC-在线工作,连接PLC,然后点击PLC-传送-到PLC。
监视:
点击PLC-操作模式-监视
程序修改分为在线修改和离线修改。
在线修改每次只能修改一条网络,然后再发送修改〔右键点击程序最左侧程序段分隔栏〕。
如图修改程序,发送程序
离线修改:
需重新下载程序,如下载步骤。
4、查看
 升级会员
升级会员 