第四章监测位移Word文件下载.docx
《第四章监测位移Word文件下载.docx》由会员分享,可在线阅读,更多相关《第四章监测位移Word文件下载.docx(48页珍藏版)》请在冰豆网上搜索。
如图4-3a,从一个已知高程的水准点BM.5起,沿各待测高程的水准点进行水准测量,最后连测到另一个已知高程的水准点BM.7上,这种形式称为附合水准路线。
附合水准路线中各测站实测高差的代数和应等于两已知水准点间的高差。
由于实测高差存在误差,使两者之间不完全相等,其差值称为高差闭合差
,即
式中:
H终――附合路线终点高程;
H始――起点高程。
b、闭合水准路线:
如图4-3b,从一已知高程的水准点BM.8出发,沿环形路线进行水准测量,最后测回到水准点BM.8,这种形式称为闭合水准路线。
闭合水准路线中各段高差的代数和应为零,但实测高差总和不一定为零,从而产生闭合差
c、支水准路线:
如图4-3c,从已知高程的水准点BM.6出发,最后没有连测到另一已知水准点上,也未形成闭合,称为支水准路线。
支水准路线要进行往返测,往测高差总和与返测高差总和应大小相等符号相反。
但实测值两者之间存在差值,即产生高差闭合差
:
在基坑工程中,一般将垂直位移监测水准点布设成闭合水准路线。
(3)水准测量仪器
水准测量用的仪器主要是水准仪和水准尺。
水准仪按精度分,有DS05、DS1、DS3、DS10等四种型号的仪器。
D、S分别为“大地测量”和“水准仪”的汉语拼音第一个字母;
精度05、1、3、10表示该仪器的精度。
如DS3型水准仪,表示该型号仪器进行水准测量每千米往返测高差精度可大于±
3mm。
DS05、DS1型水准仪属于精密水准仪,主要用于精密水准测量。
水准仪按构造分,有光学水准仪和电子水准仪。
水准仪一般由望远镜、水准器、基座三部分构成,其操作使用可详见相关教科书。
水准尺常用的有塔尺和双面尺两种,用优质木材或玻璃钢制成,常用于三、四、五等精度的水准测量,因瓦水准尺是与精密水准仪配合使用的精密水准尺,这种尺是在木质标尺的中间槽内,装有3m长的因瓦合金带尺,其下端固定在木标尺底部,上端连一弹簧,固定在木标尺顶部,因瓦带上刻有左右两排相互错开的刻划,数字注在木尺上。
(4)水准测量的主要技术要求
为了确保水准测量的精度,根据施测的不同对象,可选择相应的控制要求,高程控制测量时水准测量的主要技术要求见表4-1。
水准测量的主要技术要求表4-1
等级
每千米高差全中误差(mm)
路线长度(km)
水准仪型号
水准尺
观测次数
往返较差、附和或环线闭合差
与已知点联测
附和或环线
平地(mm)
山地(mm)
二等
2
—
DS1
因瓦
往返各一次
三等
6
≤50
往一次
DS3
双面
四等
10
≤16
五等
15
单面
注:
1、结点之间或结点与高级点之间,其路线长度,不应大于表中规定的0.7倍。
2、L为往返测段、附和或环线的水准路线长度(km);
n为测站数。
3、数字水准仪测量的技术要求和同等级的光学水准仪相同。
上表中每千米高差全中误差可按式4-1计算。
(4-1)
式中MW――高差全中误差(mm);
W――附合或环线闭合差(mm);
L――计算各W时,相应的路线长度(km);
N――附合路线和闭合环的总个数。
为了达到表4-1所列的技术要求,水准测量所使用的仪器和水准尺,应符合下列规定:
a、水准仪视准轴与水准管轴的夹角i,DS1型不应超过15″,DS3型不应超过20″。
b、补偿式自动安平水准仪的补偿误差
对于二等水准不应超过0.2″,三等不应超过0.5″。
c、水准尺上的米间隔平均长与名义长之差,对于因瓦水准尺,不应超过0.15mm;
对于条形码尺,不应超过0.10mm;
对于木质双面水准尺,不应超过0.5mm。
为了达到表4-1所列的技术要求,在实施水准观测时应符合表4-2的要求。
水准观测的主要技术要求表4-2
视线长度(m)
前后视的距离较差(m)
前后视的距离较差累计(m)
视线离地面最低高度(m)
基、辅分划或黑、红面读数较差(mm)
基、辅分划或黑、红面所测高差较差(mm)
50
1
3
0.5
0.7
100
0.3
1.0
1.5
75
2.0
3.0
5
0.2
5.0
近似相等
1、二等水准视线长度小于20m时,其视线高度不应低于0.3m。
2、三、四等水准采用变动仪器高度观测单面水准尺时,所测两次高差较差,应与黑面、红面所测高差之差的要求相同。
3、数字水准仪观测,不受基、辅分划或黑、红面读数较差指标的限制,但测站两次观测的高差较差,应满足表中相应等级基、辅分划或黑、红面所测高差较差的限值。
2、水平位移监测
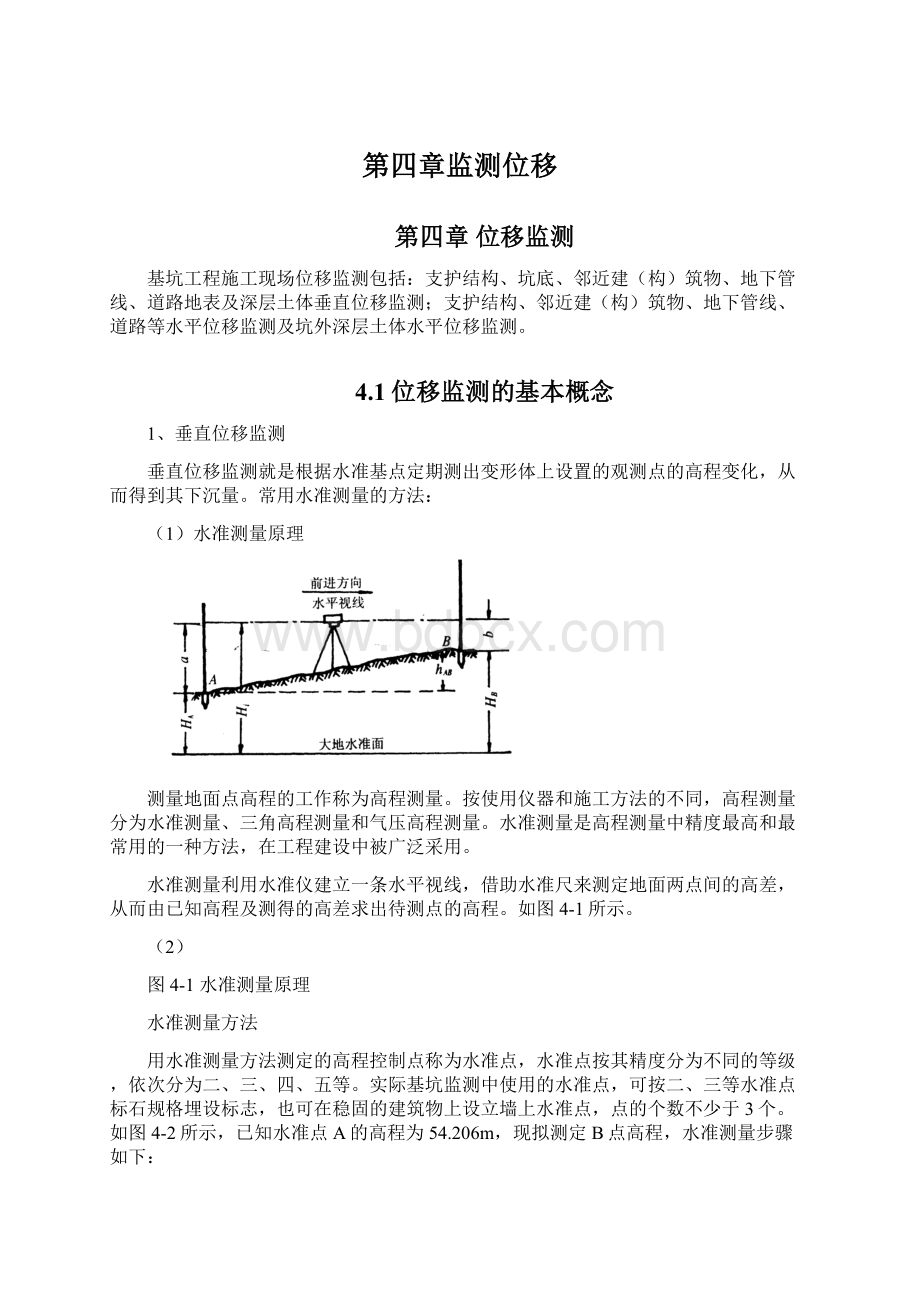
(1)水平位移测量原理及方法
水平位移的观测方法很多,可根据现场条件及仪器而定。
常用的方法有基准线法、小角法、导线法和前方交汇法等。
1基准线法
基准线法的原理:
在与水平位移垂直的方向上建立一个固定不变的铅垂面、测定各观测点相对该铅垂面的距离变化,从而求解得水平位移量。
如图4-4所示。
图4-4基准线法测位移
用基准线法观测水平位移时,先根据实际情况(如沿基坑边)设置一条基准线,并在基准线的两端埋设两个稳固的工作基点A和B,将拟监测点埋设在基准线的铅垂面上,偏离的距离不大于2cm。
观测点标志可埋设直径16~18mm的钢筋头,顶部挫平后,做成“+”字标志。
观测时,将经纬仪安置于一端工作基点A,瞄准另一端工作基点B(称后视点),此视线方向定为基准线方向。
通过测量观测点P的偏离视线的距离,即可得到水平位移值。
2小角法
用小角法测量水平位移的方法如图4-5所示。
将经纬仪安置于工作基点A,在后视点B和观测点p分别安置观测觇牌,用测回法测出∠BAP。
设第一次观测角值为β1,后一次为β2,根据两次角度的变化量△β=β2-β1,即可算出p点的水平位移量δ,即:
(式4-2)
式中ρ——换算常数,即将△β化成弧度的系数,ρ=3600×
180/π=206265"
。
D——A至p点距离(mm)
△β——β角的变化量("
)
β2-β1
图4-5小角法测位移
3导线法和前方交汇法
采用导线法或前方交汇法测水平位移时,首先在场地上建立水平位移和监测控制网,然后用精密导线或前方交汇的方法测出各测点的坐标,将每次观测出的坐标值与前次测出的坐标值进行比较,即可得到水平位移在X轴和Y轴方向上的位移分量(△X,△Y),则水平位移量为
,位移的方向根据△X、△Y求出的坐标方位角来确定。
(2)水平位移测量仪器
水平位移测量中主要测试的变化量是角度,通过测量角度的变化来计算相应的水平位移。
角度量测包括水平角测量和竖直角测量,用于完成角度量测的仪器称为经纬仪。
经纬仪按不同测角精度又分为多种,如DJ05、DJ1、DJ、2DJ6、DJ10等,“D”和“J”为“大地测量”和“经纬仪”的汉语拼音第一个字母。
后面的数字代表该仪器的测量精度。
如DJ6表示一测回方向观测中误差不超过6"
在工程中常用的经纬仪有2"
、6"
、20"
随着全站仪、电子经纬仪的普及应用,上述划分方法显得不够全面。
目前习惯统称1"
级仪器、2"
级仪器、6"
级仪器等。
光学经纬仪一般主要由基座、照准部、度盘三部分组成。
按仪器构造分,经纬仪有光学经纬仪、电子经纬仪、全站仪。
这些仪器的性能应符合下列规定:
a.照准部旋转轴正确性指标:
圆水准气泡或电子气泡在各位置的读数较差,1"
仪器不应超过0.5格,2"
仪器不应超过1格,6"
仪器不应超过1.5格。
b.光学经纬仪的测微器行差及隙动差指标:
1"
仪器不应大于1"
,2"
仪器不应大于2"
c.水平轴不垂直于垂直轴之差指标:
仪器不应超过10"
仪器不应超过15"
,6"
仪器不应超过20"
d.补偿器的补偿要求,在仪器补偿器的补偿区间,对观测超过应进行有效补偿。
e.垂直微动螺旋使用时,视准轴在水平方向上不产生偏移。
f.仪器的基座在照准部旋转时的位移指标:
仪器不应超过0.3"
仪器不应超过1"
仪器不应超过1.5"
g.光学(激光)对中的视准轴(射线)与竖轴的重合度不应大于1mm。
光学经纬仪、电子经纬仪、全站仪的构造、原理及使用操作此处不再赘述,可参考相关教科书。
(3)水平位移测量注意事项
1水平位移测量方法较多,应根据实际情况选择适宜的方法。
基准线法是基坑水平位移监测最常用的方法,其优点是精度高,直观性强,操作简易,速度快,但位移量较大,超出站牌活动范围时,其不再适用。
小角法适用于观测点零乱,并且不在同一直线上的情况下。
当位移量较大,基准线不合监测时,可使用小角法监测。
2基准线法、小角法的缺点是只能测出垂直于基准线方向的位移分量,难以确切地测出位移方向。
要较准确地测量位移方向,可采用导线法或前方交汇法。
3水平位移监测精度应视具体情况而定,可根据表4-3选用。
4在用基准线法观测水平位移时,每个测点应照准三次,观测时的顺序由近到远,再由远到近往返进行。
测点观测结束后,再应对准另一端点B,检查在观测过程中仪器是否有移动,若发现照准线移动,则重新观测。
在A端点上观测结束后,应将仪器移至B点,重新进行以上各项观测。
5工作基点在观测期间可能发生位移,因此工作基点应尽量远离开挖边线。
同时两个工作基点延长线上应分别设置后视检核点。
6为减少对中误差,有必要时工作基点可做成混凝土墩台,在墩台上安置强制对中设备,对中误差不宜大于0.5mm。
4.2位移监测的一般要求
1、基准点、工作基点、观测点的布设
在位移监测时,测量点可分为基准点、工作基点、观测点三类,如图4-6所示,其布设应符合下列要求:
图4-6变形观测的测量点关系图
(1)基准点为确定测量基准的控制点,是测定和检验工作基点稳定性,或者直接测量位移观测点(监测点)的依据。
基准点应设在较远的基岩或深埋于原状土内,不受基坑变形之影响,并便于长期保存。
但在实际工作中,若将基准点埋设在离基坑或建筑物很远的地方,引测时会使观测精度降低。
一般可根据工程大小,地形地质条件以及观测的精度要求酌情确定,只要变形影响值远小于观测误差,则可认为基准点是稳定的。
每个工程至少应有3个稳定可靠的基准点,使用时应定期检查其稳定性。
(2)工作基点是位移监测中起联系作用的点,是直接观测位移观测点的依据,应设在靠近观测目标,便于联测观测点的稳定位置。
在通视条件较好,或观测项目较少的工程中,也可不设工作基点,在基准点上直接观测位移观测点。
(3)观测点是直接埋设在变形体上,并能反映变形体的位移特征的测量点,可以从工作基点或邻近的基准点对其进行观测。
2、位移观测的等级划分及精度要求
位移观测的等级划分、精度要求及适用范围如表4-3所示。
变形监测的等级划分及精度要求表4-3
垂直位移监测
水平位移监测
适用范围
变形观测点的高程中误差(mm)
相邻变形观测点高差中误差(mm)
变形观测点的点位中误差(mm)
一等
0.1
变形特别敏感的高层建筑、高耸构筑物、工业建筑、重要古建筑、大型坝体、精密工程设施、特大型桥梁、大型直立岩体、大型坝区地壳变形监测等
变形比较敏感的高层建筑、高耸构筑物、工业建筑、古建筑、特大型和大型桥梁、大中型坝体、直立岩体、高边坡、重要工程设施、重大地下工程、危害性较大的滑坡监测等
6.0
一般性的高层建筑、多层建筑、工业建筑、高耸构筑物、直立岩体、高边坡、深基坑、一般地下工程、危害性一般的滑坡监测、大型桥梁等
12.0
观测精度要求较低的建(构)筑物、普通滑坡监测、中小型桥梁等
1变形观测点的高程中误差和点位中误差,是指相对于邻近基准点的中误差。
2特定方向的位移中误差,可取表中相应等级点位中误差的
作为限值。
3垂直位移监测,可根据需要按变形观测点的高程中误差或相邻变形观测点的高差中误差,确定监测精度等级。
3、位移监测中应注意的问题
(1)首次观测成果是各周期观测的起始值,应具有准确、可靠的观测精度,宜采取适当增加测回数的措施。
(2)要做好“五定”工作,即位移监测依据的基准点、工作基点、观测点的点位要稳定;
监测所用仪器、设备性能要稳定;
监测人员要稳定;
监测时的环境条件基本一致(尽可能稳定);
观测路线、镜位、程序和方法要固定。
以上措施在客观上要尽量减少观测误差的不定性,使所测的结构具有统一的趋向性,保证各次复测结果与首次观测的结果更具可比性。
(3)应定期对使用的基准点或工作基点进行稳定性检测。
(4)观测前,对仪器、设备的操作方法与观测程序要熟悉、正确,对所用的仪器设备必须按有关规定进行检测校正,并做好记录,并在有效期内使用。
(5)原始数据应真实可靠,记录计算要符合相关测量规范的要求,记录中应说明观测时的气象情况、施工进度和荷载变化,并按照依据正确、严谨有序、步步校核、结果有效的原则进行成果整理及计算。
4.3垂直位移监测
垂直位移监测常用水准测量的方法。
首先根据场地情况进行垂直监测基准网的布设,其次针对不同施测对象进行观测点或工作基点的布置,并通过基准网引测各观测点或工作基点的高程,得到初始值。
最后根据施工情况、观测周期、观测频率进行监测。
1、垂直监测基准网的布设
垂直位移监测基准网,由基准点和部分工作基点构成,一般布设成闭合环,并采用水准测量方法观测。
起算点高程宜采用国家或测区原有的高程系统,也可采用假设的相对高程。
2、高程控制点标石及标志
(1)可以选埋岩层水准基点标石、深埋钢管水准基点标石或砼水准基点标石。
亦可利用稳固的建筑物、构筑物设立墙上的水准基点。
(2)高程控制点应避开交通干道、地下管线、仓库堆栈、水源地河岸、松软填土、滑坡体、机器振动区以及其他能使标石、标志遭腐蚀和破坏的地点。
(3)高程控制点的标石及标志埋设如图4-7所示。
(4)标石、标志埋设后,应达到稳定后方可开始观测。
稳定期根据观测要求与地质条件确定,一般不宜少于15d。
图4-7高程控制点的标石及标志
3、垂直位移监测网的主要技术指标要求
为了确保垂直位移监测基准网的精度,其主要技术要求应符合表4-4的规定。
垂直位移监测基准网的主要技术要求表4-4
相邻基准点高差中误差(mm)
每站高差中误差(mm)
往返较差或环线闭合差(mm)
检测已测高差较差(mm)
0.07
0.15
0.13
0.30
0.4
0.60
0.8
0.70
1.40
表中n为测站数。
为了达到上表所列的技术要求,应按下述措施进行:
a、在实施水准观测时,应符合表4-5的主要技术要求;
水准观测的主要技术要求表4-5
前后视的距离较差累积(m)
视线离地面的最低高度(m)
基本分划、辅助分划读数较差(mm)
基本分划、辅助分划所测高差较差(mm)
DS05
30
1数字水准仪观测,不受基、辅分划读数较差指标的限制,但测站两次观测的高差较差,应满足表中相应等级基、辅分划所测高差较差的限值。
2水准线路跨越江河时,应进行相应等级的跨河水准测量,其指标不受该表的限制。
b、观测使用的水准仪和水准尺符合本节前述的相关要求;
c、DS05级水准仪视准轴与水准管轴的夹角不大于10"
4、坑顶及立柱垂直位移监测
(1)监测点的布置
a、坑顶垂直位移监测点应沿基坑周边布置,基坑各边线的中部、阳角处应布置监测点。
监测点间距不宜大于20m,每边监测点数量不宜少于3个。
b、立柱垂直位移监测点宜布置在基坑中部、多根支撑交汇处、地质条件复杂处的立柱上。
监测点不应少于立柱总根数的5%,逆作法施工的基坑不应少于10%,并均不应少于3根。
c、监测点设置可采用预埋式,即在浇筑混凝土之前将观测点标志固定在结构钢筋上。
也可在硬化的混凝土上用冲击钻成孔,再打入钢钉或膨胀螺丝。
(2)监测方法和精度要求
坑顶及立柱的垂直位移可采用几何水准测量方法,可按二等变形测量等级施测。
监测精度要求按表4-6确定。
支护墙(坡)顶、立柱及基坑周边地表的竖向位移监测精度(mm)表4-6
竖向位移报警值
≤20(35)
20~40(35~60)
≥40(60)
监测点测站高差中误差
≤0.3
≤0.5
≤1.5
1.监测点测站高差中误差系指相应精度与视距的几何水准测量单程一测站的高差中误差;
2.括号内数值对应于立柱及基坑周边地表的的竖向位移报警值。
(3)监测注意事项
a、监测所用的水准测量仪器应根据监测精度要求及有关规范规定而选择,一般可采用(WILD)N3精密水准仪或DS1精密水准仪。
b、观测视线长度宜为20~30m,视线高度不宜低于0.5m,宜采用闭合法消除误差。
c、观测时,仪器应避免安置在有空压机、搅拌机、卷扬机等振动影响范围内,塔式起重机等施工机械附近也不宜设站。
5、坑底隆起(回弹)监测
基坑底隆起(回弹)监测点布置应符合下列要求:
a、监测点宜按纵向或横向剖面布置,剖面宜选择在基坑的中央以及其他能反映变形特征的位置,剖面数量不应少于2个。
b、同一剖面上监测点横向间距宜为10~30m,数量不应少于3个。
c、监测点标志(观测标)应埋入基坑底面以下20~30cm,根据开挖深度和地层土质情况,可采用钻孔法埋设。
坑底隆起(回弹)监测通常在预埋观测标、开挖后采用几何水准测量方法,可按二等变形测量等级施测,监测精度要求按表4-7确定。
坑底隆起(回弹)监测的精度要求(mm)表4-7
坑底回弹(隆起)报警值
≤40
40~60
60~80
≤1.0
≤2.0
≤3.0
(3)
监测注意事项
a、观测标的做法通常如图4-8所示,头部采用长约10㎝的圆钢一段(其直径应与钻杆相配合),顶部加工成半球状(ф=20㎜,高约20㎜),其余部分加工成反丝机方式与钻杆相接,尾部为长40~50cm的角钢(50mm×
50mm×
5mm),头部与尾部与一块Φ100mm,厚20mm的钢板焊接成整体。
图4-8观测标结构示意图
b、观测标的埋设:
钻孔至基坑底面标高处,将观测标旋入钻杆下端,经钻孔徐徐放入孔底,并压入空地土中40~50cm,即将观测标尾部压入土中。
旋开钻杆,使观测标脱离钻杆,并提起。
放入辅助测杆,将观测标压入坑底设计标高以下20cm,在辅助测杆上端的测头进行几何水准测量,确定观测标的顶标高。
观测后,将辅助测杆保护管(套管)提出地面,用砂或素土将钻孔回填。
为了便于开挖后寻找观测标,可选用白灰回填50cm左右。
c、观测标的观测次数不应少于三次。
第一次在基坑开挖前,第二次在基坑开挖后,第三次在浇筑基础底板混凝土前。
d、在基坑开挖过程中,应注意观测标的保护。
观测时,应避免施工机具的影响。
6、邻近建(构)筑物的垂直位移监测
基坑邻近建(构)筑物垂直位移监测点的布置,应能全面反映建(构)筑物地基变形特征,并结合地质情况、建(构)筑物特点和荷载分布确定。
测点布置应符合下列要求:
a、建(构)筑物四角、沿外墙每10~15m处或每隔2~3根柱基上,且每侧不少于3个监测点。
b、不同地基或基础的分界处。
c、建(构)筑物不同结构的分界处。
d、变形缝、抗震缝或严重开裂处的两侧。
e、新、旧建筑物或高、低建筑物交接处的两侧。
f、烟囱、水塔和大型储藏罐等高耸构筑物基础轴线的对称部位,每一构筑物不应少于4点。
邻近建筑物的垂直位移主要采用精密水准测量,可按二等变形测量等级施测。
精度要求参照表4-3确定。
a、建筑物的测点布设高度不宜过高或过低,不得设在砖墙上;
标志埋设位置应避开用水管,窗台线、散热器、电器开关等有碍设标与观测点的障碍物。
b、建(构)筑物上的监测标志应稳固,所用铆钉或钢钉应有足够的刚度,各类标志的立尺部位应加工成半球形或有明显的突出点。
c、为了保证主要的建(构)筑物垂直位移的监测精度,应优先采用精密水准仪DSZ05或DS05,具有测微装置的
 升级会员
升级会员 