CRH2浅析Word文档格式.docx
《CRH2浅析Word文档格式.docx》由会员分享,可在线阅读,更多相关《CRH2浅析Word文档格式.docx(13页珍藏版)》请在冰豆网上搜索。
5N,弓头宽度约1950mm,具有自动降弓功能,适应接触网高度为5300~6500mm,列车运行速度250km/h。
CB201C-G3型主断路器:
真空型,额定开断容量为100MVA,额定电流AC200A,额定断路电流3400A,额定开断时间小于0.06s,采用电磁控制空气操作。
LA204或LA205型避雷器:
额定电压为AC42kV,动作电压为AC57kV以下,限制电压为107kV。
TH-2型高压电流互感器:
变流比为200/5A,用于检测牵引变压器原边电流值。
SH2052C型接地保护开关:
额定瞬时电流为6000A(15周),电磁控制空气操作,具有安全连锁。
②牵引变压器
一个基本动力单元1个,全列共计2个。
TM210型牵引变压器:
壳式结构、车体下吊挂、油循环强迫风冷。
具有1个原边绕组(25kV,3060kVA)、2个牵引绕组(1500V,2×
1285kVA),一个辅助绕组(400V,490kVA)。
③牵引变流器
一个基本动力单元2个,全列共计4个。
CI11型牵引变流器:
电压型3电平,由脉冲整流器、中间直流电路、逆变器构成,无2次谐振滤波装置和网侧谐波滤波器,采用PWM方式控制。
中间直流电压为2600V~3000V(随牵引电机输出功率进行调整)。
牵引逆变器输出电压0~2300V、频率0~220Hz,供三相交流异步牵引电动机。
变流器采用车下吊挂、液体沸腾冷却方式。
采用矢量控制,1个变流器控制4台并联的牵引电机。
④牵引电机
MT205型牵引电机,为4极三相鼠笼式异步电机。
采用架悬、强迫风冷方式,通过弹性齿型联轴节连接传动齿轮。
每节动力车4台电机(并联),一个动力单元8台,全列共计16台。
(3)CRH2牵引传动系统主电路
CRH2型动车组的牵引变流器由单相三电平脉冲整流器、中间直流环节和三电
平逆变器等部分组成。
动车组设有两个动力单元,四台牵引变流器,即每个动车
上设有一台。
每两台牵引变流器由一个牵引变压器带动,每台牵引变流器带动四
个牵引电机。
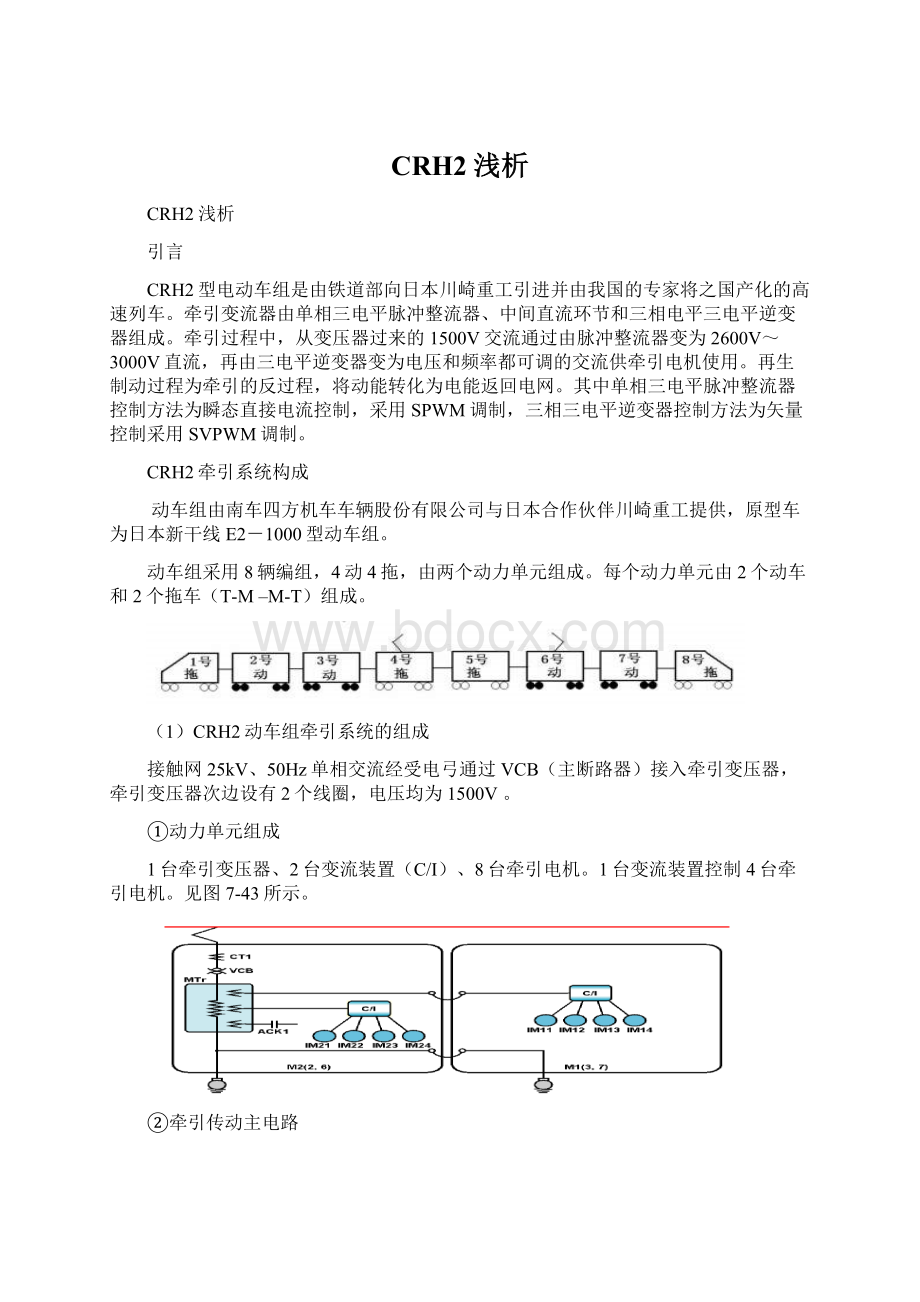
一个动力单元的主电路简图如下所示
①接触网25kV、50Hz单相交流电,经受电弓通过主断路器VCB接牵引变压器。
②牵引变压器牵引绕组设两组,原边为25kV时牵引绕组为1500V。
牵引变流器在M1、M2车上,由一台四象限脉冲整流器和逆变器及中间直流回路构成,运行时除实施牵引电动机电力供应和制动时的再生制动外,还具备相应的保护功能。
③牵引电动机为三相鼠笼式感应电机,其轴端设置速度传感器,用于检测转速(转子频率),对牵引和制动特性进行实时控制;
当出现故障时,M1车和M2车可分别使用,另外,整个基本单元可使用VCB切除,而不会影响其它单元工作。
④制动系统
制动是列车安全运行的保障,制动技术是列车技术的重要组成部分。
动车组的
制动方式,按产生制动力的方法,可以分为摩擦制动、动力制动和电磁制动,按
制动力的操纵方式,可以分为空气制动、电空制动和电制动。
CRH2型动车组CRH2
型动车组采用了空气制动和再生制动联合制动的方式,以其良好的制动性能从而
保证了列车的安全运行。
CRH2型动车组制动系统主要由电制动系统、空气制动系统、防滑装置和制动
控制系统组成,具有常用制动、快速制动、紧急制动、辅助制动和耐雪制动等功
能。
动车组的制动控制功能由BCU(制动控制单元)来完成,BCU采用微处理数
字运算方式。
BCU根据各车厢的负荷信号及速度信息计算出所需要的制动力,对
再生制动力和空气制动力进行分配。
制动系统有两套。
一是电制动,即再生制动;
二是空气制动,将电指令转换成空气指令送入制动缸起制动作用。
列车高速时电制动,低速时空气制动,制动方式转换均由微机控制系统控制完成。
当司机通过司机台上的制动控制器实施制动指令时,制动电信号首先到达车辆计算机系统,再传入制动控制系统。
制动控制系统根据列车速度,自动实行空气制动与电制动。
电气制动系统的组成与牵引系统一致。
CRH2型动车组制动系统的特点
CRH2型动车组采用的电气指令微机控制直通式电空制动系统采用电信号来传
递制动和缓解指令,司机可以通过电气指令对制动缸的空气压力进行直接控制,
控制方便,响应快。
动车组制动系统主要有以下特点:
1)采用电空联合制动的方式,并且可以根据载荷自动调整制动力;
2)具有适应粘着变化规律的速度一粘着模式;
3)具有防滑保护功能;
4)以lMlT为单元进行制动力的协调配合,充分利用动车的再生制动,减少
拖车空气制动的使用,当再生制动力不足时才由制动力补充;
5)具有与车载ATO/LKJ2000的接口,施行安全制动;
6)具有故障诊断和相关信息保存功能;
7)当安全回路失电时可施行紧急制动。
三点式(IGBT器件)主电路
四象限整流、三相逆变均采用IGBT。
逆变器续流二极管的作用:
牵引时续流,当逆变开关由导通变为截止时,虽然电压突变降为零,但由于电动机线圈的电感作用,储存在线圈中的电能开始释放,续流二极管提供通道,维持电流继续在线圈中流动。
再生制动时电流通路,电动机发电状态,续流二极管为再生电流提供通道,使其回流到直流电源。
1、原理电路
2、实际常用电路形式
(1)三点式脉冲整流器
四象限变流器一般采用二点式(如我国CRH1、CRH3、CRH5等)。
从90年代以来国外电力机车上开始采用三点式四象限变流器(如我国CRH2)。
三点式四象限变流器电网电流波形更接近正弦,比二点式四象限变流器具有更好的性能与可靠性。
1、电路结构特点
说明:
图中Cd1、Cd2为支撑电容,L2、C2分别为2次谐波滤波支路电感和电容。
特点:
①直流中间环节电容被分成两部分,以使开关K1和K2得到Ud/2、-Ud/2、0三种电平,分别用1,-1,0表示。
②变流器包含两个理想的三点式开关K1、K2。
图7-10中开关K1、K2的通断与图7-11中A、B两端桥臂各元件的通断情况参见附表7-1。
模式序号
K1
K2
uAB
正向导通回路
负向导通回路
1
V42-D61-D52-V22
D51-V12-V32-D62
2
+1
+Ud/2
D12-D11-D52-V22
V11-V12-V32-D62
3
-Ud/2
V42-D61-V21-V22
D51-V12-D22-D21
4
-1
+Ud/2
V42-D61-D31-D32
D51-V12-V32-V31
5
V42-V41-D52-V22
D41-D42-V32-D62
6
+Ud
D12-D11-D31-D32
V11-V12-V32-V31
7
-Ud
V42-V41-V21-V22
D41-D42-D21-D22
8
D12-D11-V21-V22
V11-V12-D22-D21
9
V42-V41-D31-D32
D41-D42-V32-V31
由表可见,在牵引或再生工况下,共有9种开关状态:
=Ud、-Ud各对应1种导通回路;
=Ud/2、-Ud/2各对应2种导通回路;
=0则对应着3种导通回路
三点式四象限变流器各桥臂元件的开关状态同样采用调制波
与三角波
相交的方法,则在A、B端可获得正弦脉宽调制的电压波形
。
忽略
与
的高次谐波,只考虑其基波
,则有
调整
的幅值和相位,即可使
在四个象限内随意变化,使:
牵引时——
同相;
再生制动时——
反相;
(a)整流工况 (b)逆变(再生)工况
(2)直流中间环节
Cd和L2、C2组成(见图7-4)
1、中间贮能(Cd)
在A、B短路(
=0)期间,LN电磁贮能;
A、B非短路(
≠0)期间
与LN的贮能共同向Cd充电,使
交流侧与直流侧能量不守恒,由Cd贮能。
故:
四象限整流→斩波升压,实现较低的uN→较高的Ud。
如:
CRH2车1500V的UN→2800V的Ud(电机额压2200V)。
Cd又叫支撑电容器,起作用:
①与脉冲整流器、逆变器交换无功功率和谐波功率(脉宽调制过程中产生的)。
②与异步电动机交换无功功率。
③由于串联谐振回路中实际存在电阻,二次谐波电流并非全部通过串联谐振电路,而是由串联谐振电路和支撑电容器分流。
所以,支撑电容器也部分地起着与变压器漏感交换无功功率的作用。
④支撑中间回路电压,使其保持稳定。
若Cd太小,变流器的控制将变得相当困难。
因控制稍有误差,Ud就会出现很大的波动。
支撑电容器Cd的取值,据以下准则来经验取值:
中间回路直流电压保持稳定,峰-峰波动值不超过规定的允许值。
中间回路直流电流是连续的值,且不超过规定的许可值。
中间回路损耗应保持最小。
所选Cd的参数不影响整个系统的稳定性。
应当成功地抑制逆变器、电机中发生的暂态过程,保持系统稳定。
在应用中,如果没有正确地选择中间回路电容器的值,其高频电流可能引起对通信和信号系统的电磁干扰。
2、滤波(L2、C2)
设电源
,且
四象限调制后
的基波:
,直流分量
,交流分量
L2、C2的作用:
①对2倍网频调谐,滤掉交流分量,仅直流分量流入负载。
②2倍网频串联谐振的无功功率,与来自阻抗LN的功率交换,并因而降低电源的瞬时功率脉动分量。
(3)三点式(三电平)逆变器
电压的提高,特别是采用GTO管,采用多点式,以三点式最为成功。
见图所示。
把中间直流正极、直流中点、负极接电动机,输出+Ud/2~0、0~-Ud/2间变化,故亦叫中点嵌位逆变器。
波形:
见图7-31所示。
三电平逆变器每相4个功率开关元件,分3种开关工作模式,以图3-15的A相为例:
(1)T11、T12导通,T13、T14关断,则不论电机负载的电流方向,A点的电位都为P;
(2)T12、T13导通,T11、T14关断,则不论电机负载的电流方向,A点的电位都为0;
(3)T13、T14导通,T11、T12关断,则不论电机负载的电流方向,A点的电位都为N。
三电平逆变器输出端电压只能有以上三种情况,在导通组合中T11、T14不能同时导通,三种工作模式和每相输出电压如下表所示。
三电平逆变器进行工作模式的切换时,不允许由1、3模式间的直接切换,只能是P-0-N或N-0-P式的切换,由表3-4也看出,对A相V11~V14开关元件必须是V11和V13、V12和V14的通断关系互补,这些必须在控制中予以保证。
工作模式
V11
V12
V13
V14
输出电压
代号
1
通
通
断
Ud/2
P
2
0
3
-Ud/2
N
表3-4三电平逆变器A相的三种通、断模式
电压空间矢量控制(SVPWM)
三电平逆变器每相的开关状态有P、O、N三种,对三相对称系统而言可组合成33=27种开关状态,每一种开关状态的输出电压,在定子空间三相A、B、C坐标系上都对应一个电压空间矢量。
SVPWM控制的基本思想是,通过三相开关状态的组合转换,不仅控制电压空间矢量的幅值而且控制磁链矢量在定子空间运动轨迹近似于圆,则所对应的三相电压必为对称且接近于正弦。
由于三电平逆变器提供了更多的电压空间矢量,实现SVPWM的条件较二电平逆变器更好,得到的控制结果也更为理想。
三电平逆变器每相输出电压有P、O、N三种开关状态,三相即可组合种开关模式,如表7-1所示。
PPP
PPN
PPO
PON
POO
PNN
POP
PNO
PNP
OOO
OPN
OPO
OON
OPP
ONN
OOP
ONO
ONP
NNN
NPN
NPO
NON
NPP
NOO
NOP
NNO
NNP
表中每格的三个字母分别是逆变器A、B、C三相输出端的开关状态,按照图7-4把三相定子空间分为互成1200的A、B、C三相,则表7-1每格三个字母结合便确定了一个合成电压空间矢量。
按排列组合,三电平逆变器总共可获得27个合成电压空间矢量。
图7-9是这27个电压空间矢量的幅值和相位图。
图7-9(a)三电平逆变器组合电压空间矢量(b)一个扇区分成的区域
27个电压空间矢量中只有19个独立矢量,因为内六边形有二个非零矢量重合而三个零电压矢量是相重叠的。
为保证定子空间的磁链幅值不变须满足:
图7-10三电平逆变器在一个扇区的PWM波
(a)在1三角区(b)在2三角区(c)在3三角区(d)在4三角区
由图7-10扇区内,2、3、4三个区域,都没有零电压矢量加入,只有在1区能使用零矢量调节。
从图(7-10)看出,各三角区的PWM波都以
轴对称分布,表明轴两侧基本电压矢量的作用时间各为1/2。
对称分布保证了进行基本电压矢量切换时,在一个周期内各开关元件的开、断时间是相等的。
与二电平相比三电平逆变器SVPWM控制的优势,主要在两点:
1)、三电平有更多(27种)的基本电压空间矢量,而且包含了三个不同的电压等级(
、
和
),可为合成给定电压
的调整提供更多的选择。
2)、当电动机运行于起动或低速阶段要求电压
低,处于1三角区内,因1三角区在
的电压级内,基本电压幅值减小一半,由以上分析可知,在合成中可缩短零电压矢量加入的作用时间,使
电压波形更接近正弦,有利于电机的起动过程。
在电力牵引中SVPWM控制有以下特点:
使机车的低速性能有所改善,电动机电压调节更加连续,控制系统的软、硬件结构简化,控制的性能好、响应快。
交直交机车辅助电路系统
辅助电路功用:
保证列车正常运行(牵引、制动)以及照明、空调等所必需的。
辅助电路组成:
辅助电源、辅助用电设备。
辅助电源:
牵引变压器次级辅助绕组,经整流、逆变为三相交流电压,再供给负载;
当电力不能来自牵引电网时,采用外接电源或蓄电池供电。
同时,还包括列车控制系统所需不间断安全电源。
辅助用电设备:
牵引电机风机、冷却塔风机、主变流器冷却用水泵(或油泵)及风机、辅助变流器冷却风机、主变流器油泵、空气压缩机、充电机及其风机、空调机及各种电动阀门、车厢照明及各种服务性电气设备。
 升级会员
升级会员 