PLSY指令的应用详解Word文件下载.docx
《PLSY指令的应用详解Word文件下载.docx》由会员分享,可在线阅读,更多相关《PLSY指令的应用详解Word文件下载.docx(12页珍藏版)》请在冰豆网上搜索。
,等等。
步进角越小,则步进马达的控制精度越高。
我们根据步进角可以控制马达行走的精确距离。
比如说,步进角0.72°
,马达旋转一周需要的脉冲数为360/0.72=500脉冲,也就是对步进马达驱动器发出500个脉冲信号,马达才旋转一周。
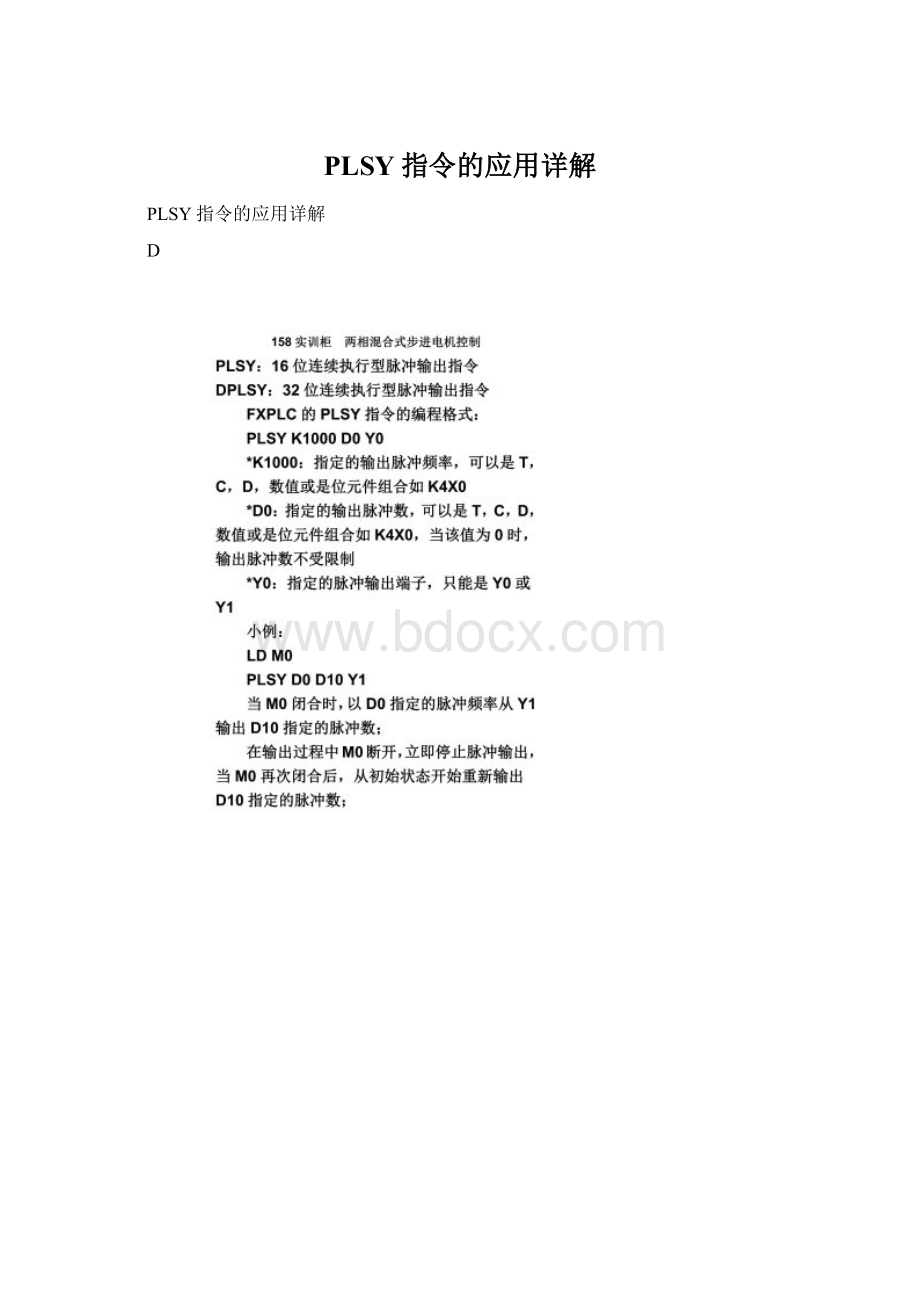
所以,根据以上步进马达的工作原理,你需要选择合适的PLC。
你用FX2N的PLC,需要制定为MT晶体管型,MR为继电器型,不可以发高速脉冲,所以必须用MT型。
2,至于接线图,你要知道FX2N的PLC最多发两路脉冲,脉冲口为Y0和Y1,频率为20KHZ。
根据步进电机需要的角度和速度,K也可以是寄存器D,把K值传到D就可以了,比如用人机界面的时候,就是在触摸屏上改变D值的
三菱或者西门子PLC将计数器的数据传送给数据寄存器的梯形图怎样画三菱:
MOVC0D0
用三菱的PLC控制步进电机,如何实现步进电机慢速旋转,当碰到接近开关时,步进电机快速后退到起始点。
第七章步进电机
一、步进电机的概述
⏹1、定义
⏹步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
⏹特点
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
⏹虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
⏹因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
二、步进控制系统的组成
1、主要由以下三部分组成
1)、控制器(plcmcu定位控制模块)
2)、步进驱动器
3)、步进电机和工作台
⏹外观图
⏹2、硬件接线步进电机、步进驱动器和plc间的硬件接线
三、步进电机工作原理
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,点击的转速、停止的位置只取决于控制脉冲信号的频率和脉冲数.
脉冲数越多,电机转动的角度越大;
脉冲的频率越高,电机转速越快,但不能超过最高频率,否则点击的力矩迅速减小,电机不转。
分类方式
具体类型
按力矩产生的原理
反应式:
转子无绕组,由被激磁的定子绕组产生反应力矩实现步进运行
激磁式:
定、转子均有激磁绕组(或转子用永久磁钢),由电磁力矩实现步进运行。
按输出力矩大小
伺服式:
输出力矩在百分之几至十分之几(N.m),只能驱动较小的负载,要与液压扭矩放大器配用,才能驱动机床工作台等较大的负载。
功率式:
输出力矩在5~50(N.m)以上,可以直接驱动机床工作台等较大的负载。
按定子数
1)单定子式2)双定子式3)三定子式4)多定子式
按各种绕组分布
1.径向分布式:
电机各相按圆周依次排列
2.轴向分布式:
电机各相按轴向依次排列
⏹步进电机的工作原理实际上是电磁铁的作用原理。
⏹当某相定子励磁后,它吸引转子,转子的齿与该相定子磁极上的齿对齐,转子转动一个角度,换一相得电时,转子又转动一个角度。
如此每相不停地轮流通电,转子不停地转动。
⏹上述控制方式三相单三拍,得电顺序是A→B→C→A,电机逆时针转动
⏹上述控制方式三相单三拍,得电顺序是A→C→B→A,电机顺时针转动
⏹所以电机运行的方向和通电的相序有关,改变通电的相序,电机的运行方向也就改变。
⏹1:
上述介绍的是三相单三拍的工作过程,除此之外还有三相双三拍,三相六拍等工作方式。
双相双三拍得电方式同事两相绕组通电:
如AB→BC→CA→AB→…
三相六拍的控制方式是:
A→AB→B→BC→C→CA→A→……
⏹2:
电机的转速和相序切换的频率有关,切换得越快,电机转动的越快。
电机转动的方向和相序有关。
⏹3:
电机每拍转动的角度,称步距角,步距角和电机的结构有关。
其中m=定子绕组的相数,z=转子齿数,k为通电方式,当是m相m拍时,k=1;
当是m相2m拍时,k=2.如上例中,m=3,z=4,k=1.
=360°
/(3x4x1)=30°
四、步进驱动器原理
⏹从步进电机的转出原理可以得出,要使步进电机正常运行,必须按规律控制步进电机的每一相绕组得电。
步进驱动器接受外部的信号是方向信号DIR脉冲信号CP。
另外步进电机在停止时,通常有一相得电,电机的转子被锁住,所以当需要转子松开时,可以使用脱机信号FREE.
环型分配器的功能:
环型分配器的功能是把外部cp段送进的脉冲进行分配,给功率放大器,功率放大器相应相得晶体管导通,步进电机的线圈得电。
五、步进驱动器有关细分的设置
⏹什么叫细分?
为了提高步进电动机的精度,现在的步进驱动器都有细分的功能,所谓细分,就是通过驱动器中电路的方法把步距角减小。
⏹比如把步进驱动器设置成5细分,假设原来步距角1.8°
,那么设成5细分后,步距角就是0.36°
也就是说原来一步可以走完的,设置成细分后需要走5步。
⏹步进驱动脉冲的频率和输出转矩的关系
⏹当输出频率超过步进电机的最高频率的时候,输出转矩会急速下降。
⏹步进驱动器细分的设置方法
六、应用案例分析
⏹例一:
控制步进电机转动规定的角度
利用plc作为上位机,控制步进电动机按一定的角度旋转。
现有步进电机,步距角是1.8°
要求设置4细分,电机的额定电流是2.2安
控制要求:
1)利用plc控制步进电机顺时针转2周,停5s,逆时针转1周,停2s,如此循环进行,按下停止按钮,电机马上停止(电机的轴锁住)。
2)要求用静态电流半流控制步进电机。
3)按下脱机按钮,电机的轴松开。
⏹解题过程:
1)硬件接线
⏹2)I/O定义:
⏹x0→启动,x1→停止,x2→脱机;
y0→脉冲输出,y1→控制方向,y2→脱机控制
3)设置细分和电流(DIP)通过上表可设置:
⏹4)编写控制程序:
分析:
在没有设置细分时,步距角是1.8°
,也就是200脉冲/转。
设置成4细分后,则是800脉冲/转。
●控制程序可以用步进指令编写,用plsy指令产生脉冲,脉冲用y0输出,y1控制方向
●画出状态功能图
编写梯形图:
丢步的两个原因:
1:
负载过高2:
驱动频率过高
所以在设置脉冲值的时候,不应给太高的值。
状态功能图
例二:
在某系统中,要求对某种成圈的线材按固定裁开,裁剪的长度可以通过数字开关设置(0~99mm),切刀的时间是1s。
试设计这一系统。
滚轴的周长是50mm。
解题过程:
⏹1)步进电机的选择。
步进电机的选择主要考虑两方面:
一是:
电机的功率。
要求能拖动负载,在本系统中,要把成圈的线材拖动,决定于电机的工作电流,工作电流越大,功率就越大。
二是:
要选电机的步距角。
但是如果选择带细分功能的驱动器,步距角就没有多大的意义,因为通过细分可以改变步距角。
所以主要考虑的是电机的功率。
我们选择两相步进电机,步距角是1.8°
,设置为5细分,所以电机旋转一周1000个脉冲,每个脉冲0.05mm。
⏹2)plc的选择
⏹我们可以选择fx1n或fx2系列的plc,但必须是晶体管式.
我们选择fx2n系列的plc根据系统接线,y0输出脉冲,y1控制方向,y3脱机信号,y4切刀信号。
数字开关接在x0~x7。
启动按钮是x10,停止按钮是x11,脱机按钮式x12。
⏹
3)plc控制程序设计4)编写梯形图
 升级会员
升级会员 