安徽省大学生工程训练综合能力竞赛命题.docx
《安徽省大学生工程训练综合能力竞赛命题.docx》由会员分享,可在线阅读,更多相关《安徽省大学生工程训练综合能力竞赛命题.docx(15页珍藏版)》请在冰豆网上搜索。
安徽省大学生工程训练综合能力竞赛命题
第五届安徽省大学生工程训练综合能力竞赛命题
本命题用于第五届安徽省大学生工程训练综合能力竞赛。
包含3类5项,即无碳小车类、物料搬运机器人类和全地形小车类。
其中无碳小车3项为“S”型赛道常规赛、“8”字型赛道常规赛和“S环形”赛道挑战赛。
命题具体说明如下。
一、无碳小车避障行驶竞赛命题说明
1.1无碳小车竞赛命题
本届竞赛命题为“以重力势能驱动的具有方向控制功能的自行小车”。
自主设计并制作一种具有方向控制功能的自行小车,要求其行走过程中完成所有动作所需的能量均由给定重力势能转换而得,不可以使用任何其他来源的能量。
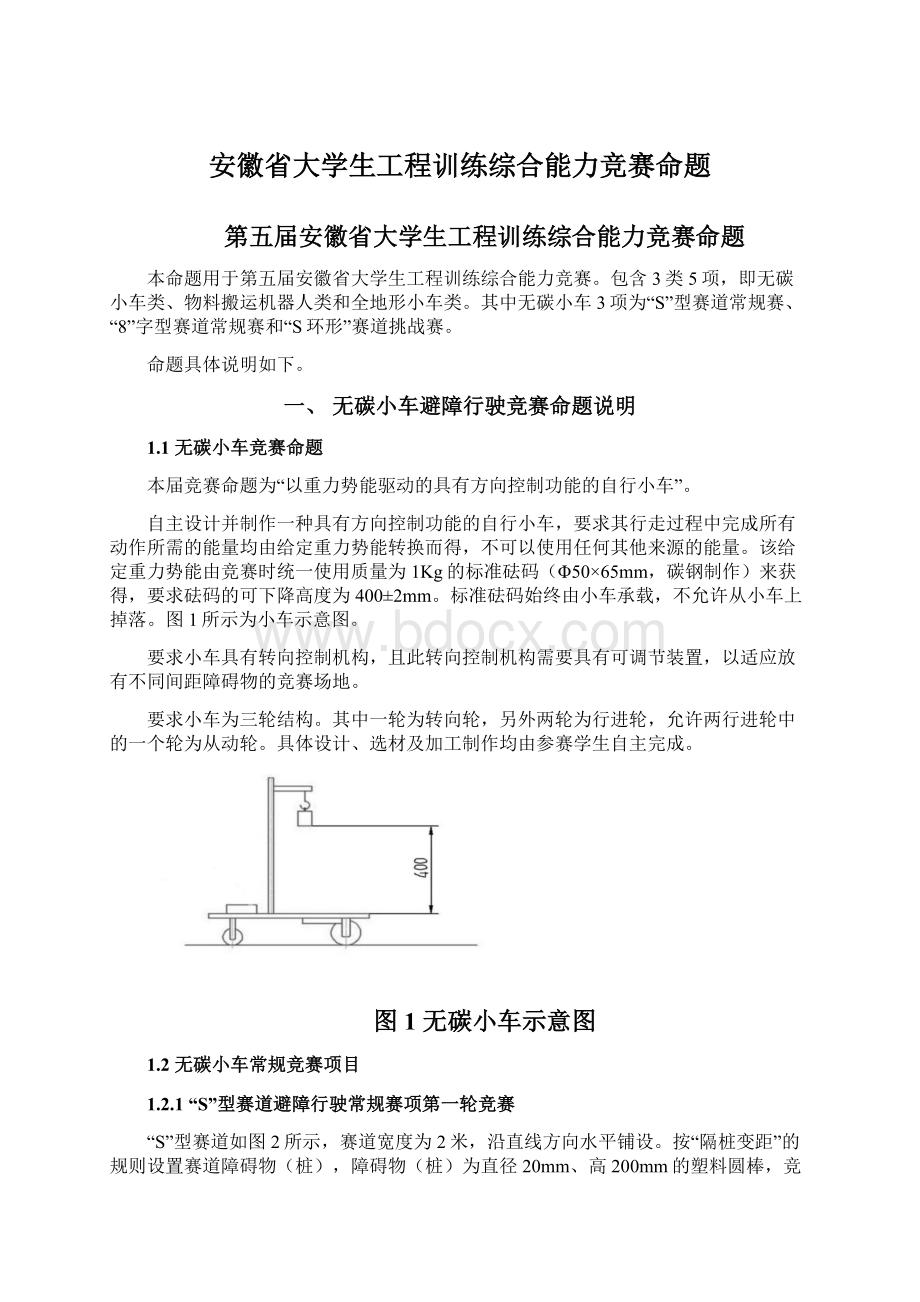
该给定重力势能由竞赛时统一使用质量为1Kg的标准砝码(Φ50×65mm,碳钢制作)来获得,要求砝码的可下降高度为400±2mm。
标准砝码始终由小车承载,不允许从小车上掉落。
图1所示为小车示意图。
要求小车具有转向控制机构,且此转向控制机构需要具有可调节装置,以适应放有不同间距障碍物的竞赛场地。
要求小车为三轮结构。
其中一轮为转向轮,另外两轮为行进轮,允许两行进轮中的一个轮为从动轮。
具体设计、选材及加工制作均由参赛学生自主完成。
图1无碳小车示意图
1.2无碳小车常规竞赛项目
1.2.1“S”型赛道避障行驶常规赛项第一轮竞赛
“S”型赛道如图2所示,赛道宽度为2米,沿直线方向水平铺设。
按“隔桩变距”的规则设置赛道障碍物(桩),障碍物(桩)为直径20mm、高200mm的塑料圆棒,竞赛小车在前行时能够自动绕过赛道上设置的障碍物。
沿赛道中线从距出发线1米处开始按平均间距1米摆放障碍桩,奇数桩位置不变,根据经现场公开抽签的结果,第一偶数桩位置在±(200~300)mm范围内做调整(相对于出发线,正值远离,负值移近),随后的偶树桩依次按照与前一个偶树桩调整的相反方向做相同距离的调整。
以小车成功绕障数量和前行的距离来评定成绩。
每绕过一个桩得8分(以小车整体越过赛道中线为准),一次绕过多个桩或多次绕过同一个桩均算作绕过一个桩,障碍桩被推出定位圆或被推倒均不得分;小车行走的距离每延长米得2分,在中心线上测量。
各队使用竞赛组委会统一提供的标准砝码给参赛小车加载,并在指定的赛道上进行比赛。
小车在出发线前的位置自行决定,不得越线。
每队小车运行2次,取2次成绩中的最好成绩。
图2无碳小车在重力势能作用下自动行走(S赛道)示意图
小车绕障有效的判定为:
小车从赛道一侧越过一个障碍后,整体越过赛道中线且障碍物未被撞倒或推出障碍物定位圆;小车连续运行,直至停止。
小车有效的运行距离为:
停止时小车最远端与出发线之间的垂直距离。
1.2.2“8”字型赛道避障行驶常规赛项第一轮竞赛
如图3所示,竞赛场地在半张标准乒乓球台(长1525mm、宽1370mm)上,有3个障碍桩沿中线放置,障碍桩为直径20mm、长200mm的3个圆棒,两端的桩至中心桩的距离为350±50mm,具体数值由现场公开抽签决定。
小车需绕中线上的三个障碍桩按“双8”字型轨迹循环运行,以小车成功完成“双8”字绕行圈数的多少来评定成绩。
图3“双8”字型赛道平面示意图
参赛时,要求小车以“双8”字轨迹交替绕过中线上3个障碍桩,保证每个障碍桩在“8”字形的一个封闭圈内。
每完成1个“双8”字且成功绕过3个障碍,得12分。
各队使用组委会统一提供的标准砝码参赛。
每队小车运行2次,取2次成绩中最好成绩。
一个成功的“8”字绕障轨迹为:
3个封闭圈轨迹和轨迹的4次变向交替出现,变向指的是:
轨迹的曲率中心从轨迹的一侧变化到另一侧。
比赛中,小车需连续运行,直至停止。
小车没有绕过障碍、碰倒障碍、将障碍物推出定位圆区域、砝码脱离小车、小车停止或小车掉下球台均视为本次比赛结束。
1.2.3三维设计及3D打印制作环节
由1名参赛队员参与竞赛;经抽签,按照大赛统一规定要求,在计算机上设计3D打印图样,绘制出图样的零件图,零件图上需标示出配合尺寸公差,并用3D打印制作出来。
本项内容应在规定时间内完成,违规或延时完成者减分,不能完成者或延时超限者不得分,不能进入后面环节的竞赛。
1.2.4参赛小车机械拆卸及重装竞赛环节
再次抽签,确定新的“S”和“8”字赛道的障碍物桩距。
每队派出2名参赛队员对本队参赛小车上进行零件拆卸,裁判人员根据爆炸图进行对照检查。
拆卸完成后,按照新产生的抽签数据,装配并调节小车。
拆装工具自带,除标准件及轴承外,不允许自带任何备用零件入场,对违反规定的行为按减分法处理。
现场将提供钳工台。
如需使用机床加工,可提出申请,经裁判批准,可到车间进行普车、普铣、钻孔等常规加工作业,所需刀具和量具自备。
本项内容在规定时间内完成得满分,违规或延时完成者减分,不能完成者不得分。
1.2.5无碳小车避障行驶常规赛第二轮竞赛
用装配调试完成的小车,再次进行避障行驶竞赛,规则分别同1.2.1和1.2.2。
1.3无碳小车挑战赛项目
1.3.1“S环形”赛道挑战赛第一轮竞赛
“S环形”赛道如图4所示,由直线段和圆弧段组合而成一封闭环形赛道,沿赛道中线放置12个障碍物(桩),障碍桩为直径20mm、高200mm的塑料圆棒。
竞赛小车能够在环型赛道上以“S环形”路线依次绕过赛道上障碍桩,自动前行直至停止。
赛道水平铺设,直线段宽度为1200mm,两侧直线段赛道之间设有隔墙;沿赛道中线平均摆放5个障碍桩,奇数桩位置不变,偶数桩位置根据经现场公开抽签结果,在±(200~300)mm范围内相对于中心桩做相向调整(相对于中心桩,正值远离,负值移近)。
以小车前行的距离和成功绕障数量来评定成绩。
每绕过一个桩的8分(以小车整体越过赛道中线为准),一次绕过多个桩或多次绕过同一个桩均算作绕过一个桩,障碍桩被推出定位圆或被推倒均不得分;小车行走的距离每延长米得2分,在中心线上测量。
各队使用竞赛组委会统一提供的标准砝码给参赛小车加载,并在指定的赛道上进行比赛。
小车在出发线前的位置自行决定,不得越线。
每队小车运行2次,取2次成绩中的最好成绩。
图4“S环形”赛道示意图
1.3.2三维设计及3D打印制作环节
要求同1.2.3。
1.3.3参赛小车机械拆卸及重装竞赛环节
要求同1.2.4。
1.3.4第二轮小车避障行驶竞赛
用装配调试完成的小车,再次进行避障行驶竞赛,规则同1.3.1。
1.4现场问辩环节
根据参赛队数量,经各队自愿申请或通过抽签产生参加答辩环节的参赛队。
答辩问题涉及本队参赛作品的设计、制造工艺、成本及管理等相关知识。
参与答辩的参赛队按答辩得分由高到低排序,得分高于答辩平均分的队将获得总分加分,得分低于答辩平均分的队将得到总分减分。
1.5工程设计方案评审
各参赛队需做出针对参赛项目的工程设计方案文件并在参赛报到时提交,共3种文件,每种文件纸质版一式两份,电子版1份;三种文件总分50分,分别为1)结构设计方案,15分;2)加工工艺设计方案,15分;3)工程项目创业企划书,20分。
所提交的文件均应由参赛队员自主完成,格式及装订均须符合技术规范和竞赛要求,具体规定及要求由竞赛秘书处另行发布。
各参赛队在报到时还须提交与设计制作有关的3分钟视频1份和PPT文件1份,具体规定及要求由竞赛秘书处另行发布。
竞赛评审组对每个参赛队提交的设计方案文件按减分法进行评阅。
各队该项得分计入其竞赛总成绩。
二、智能物料搬运机器人竞赛项目命题说明
2.1竞赛命题
本项竞赛题目为“智能物料搬运机器人竞赛”。
自主设计并制作一款能执行物料搬运任务的智能移动机器人。
该机器人能够在规定场地内自主行走,通过扫描阅读二维码领取任务,自主寻找、识别任务指定的物料,按任务要求的顺序将其搬运至指定的存放地点,并按照要求的位置和方向摆放。
根据现场抽签决定抓取物料的类型,现场设计机器人末端抓取装置(手爪),使用3D打印或激光切割设备完成制造,安装于参赛机器人手臂末端后进行现场运行比赛。
本项目参赛所要求的实物和文件均由参赛学生自主完成。
2.2题目要求
2.2.1参赛机器人的功能要求
应具有场地目标位置识别、自主路径规划、自主移动、二维码读取、物料颜色识别或形状识别、物料抓取和搬运等功能;全部竞赛过程由机器人自主运行,不允许使用遥控等人工交互手段及除机器人本体之外的任何辅助装置。
2.2.2参赛机器人的电控及驱动要求
主控电路采用嵌入式解决方案(包括嵌入式微控制器等),实现二维码读取、自主定位、物料识别、以及路径规划及运动控制等功能,所用传感器和电机的种类及数量不限。
自行设计制作主控电路版,其上须带有电机驱动电路及任务内容显示装置,该显示装置能够持续显示二维码任务信息直至比赛结束。
机器人驱动电源供电电压限制在12V以下(含12V),电池随车装载,场内赛程中不能更换。
2.2.3参赛机器人的机械结构要求
自主设计并制造机器人的机械部分,该部分允许采用标准紧固件、标准结构零件及各类商品轴承。
机器人的行走方式、机械手臂的结构形式均不限制。
机器人腕部与末端抓取装置(手爪)的连接界面结构自行确定。
除末端抓取装置(手爪)在竞赛现场设计制作外,其他均在校内完成,所用材料自定。
2.2.4参赛机器人的外形尺寸要求
进入场地参赛的机器人(含末端抓取装置(手爪))应能够通过一个尺寸与一张A4纸相当的门框方可参加比赛。
“A4门框”横向或竖向放置均可。
允许机器人结构设计为可折叠形式,但通过“A4门框”后应能自行展开。
2.2.5搬运物料
待搬运物料的形状为简单机械零件的抽象几何体,包括圆柱体、方形体、球体及其组合体,物料的各边长或直径尺寸限制在30~80mm范围,重量范围为40~80g,以上形状和参数的具体选择将通过现场抽签决定。
物料的材料为塑料或铝合金,表面粗糙度Ra≥3.2。
物料有颜色区别:
颜色为红(RGB值为255,0,0)、绿(RGB值为0,255,0)、蓝(RGB值为0,0,255)三种颜色。
在比赛场地内固定位置设有物料提取区和物料存放区。
物料提取区长×宽×高为500×100×80(mm),木质或塑木材料,浅色亚光表面。
物料存放区为长×宽×高为800×300×0(mm)区域,由三组不同颜色的同心圆和十字线构成,每组同心圆和十字线为同一种颜色。
2.2.6竞赛场地
赛场尺寸为2400mm×2400mm方形平面区域,周围设有高度为100mm的白色或其他浅色围挡板,并以高度和宽度均为20mm的挡板将场地一分为二,机器人只能在挡板所围区域内活动。
赛道地面为亚光人造板或合成革铺就而成,基色为浅黄色或其它非红、非绿、非蓝色;地面施划有间隔为300mm的黑色方格线,经线为线宽20mm的单线,纬线线宽为15+10(间隔)+15mm的双线,可用于机器人行走的地面坐标位置判断。
见图5、图6所示。
竞赛时,2台机器人同时进入上述场地并在各自区域内定位和运行。
如果出现越界并发生妨碍对方机器人移动或工作的情况,将被人工提起回退至上一工作地点重新运行,所用时间不会从竞赛计时中减除。
图5智能物料搬运机器人建赛场地设置平面图
图6智能物料搬运机器人建赛场地设置三维示意图
2.2.7任务二维码
在赛场围挡内侧垂直安装2个显示屏不小于9.7寸的平板电脑,用于显示给机器人读取任务的二维码。
二维码尺寸为100×100(像素)。
二维码信息被设置为“1”、“2”、“3”三个数字的组合,如“123”、“321”等。
其中,“1”对应红色,“2”对应绿色,“3”对应蓝色。
数字组合表明了物料搬运过程中不同颜色物料的搬运顺序。
平板电脑中存有不少于6种任务的二维码,比赛时随机播放。
2.3竞赛环节
2.3.1第一轮智能物料搬运机器人场地竞赛环节
经现场抽签决定待搬运物料的形状组别(圆柱体、长方体)以及各参赛队的赛场号位。
物料的直径或底边长为50mm,高度为80mm,重量约为60g。
三种不同颜色的
 升级会员
升级会员 