清华大学机械设计原理A2第一次讨论课报告Word文档格式.docx
《清华大学机械设计原理A2第一次讨论课报告Word文档格式.docx》由会员分享,可在线阅读,更多相关《清华大学机械设计原理A2第一次讨论课报告Word文档格式.docx(13页珍藏版)》请在冰豆网上搜索。
1.题目1-3
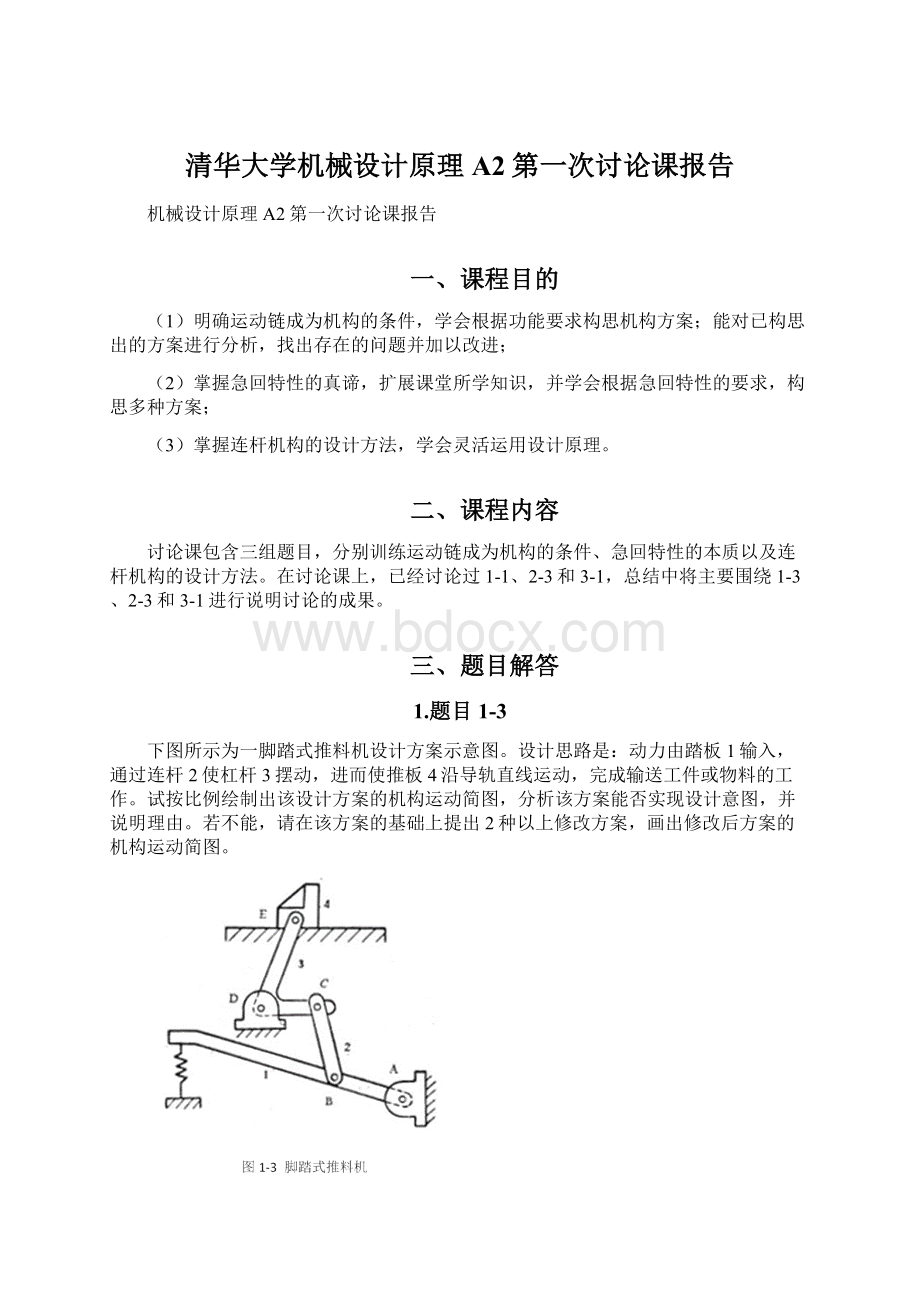
下图所示为一脚踏式推料机设计方案示意图。
设计思路是:
动力由踏板1输入,通过连杆2使杠杆3摆动,进而使推板4沿导轨直线运动,完成输送工件或物料的工作。
试按比例绘制出该设计方案的机构运动简图,分析该方案能否实现设计意图,并说明理由。
若不能,请在该方案的基础上提出2种以上修改方案,画出修改后方案的机构运动简图。
1.1正确解答
画出该设计方案的机构运动简图如图:
该运动链有4个构件(不包括机架)和6个运动副;
且只有一个原动件。
计算该运动链的自由度如下:
F=4×
(6-3)-6×
(5-3)=0
由于自由度数为零,与原动件数不相等,故而该运动链不能成为机构。
根据自由度计算公式,我们得知如果能增加一个构件,同时增加一个五级副,就可以将自由度数凑成F=1。
根据此思路,可以对运动链进行修改。
方案①:
此时,运动链的自由度为:
F=5×
(6-3)-7×
(5-3)=1
运动链的自由度数等于原动件数,且运动且运动过程中不会发生干涉,故而该运动链能够成为机构。
但是,仅仅满足原动件数等于自由度数是不能够完全确定运动链是否能成为机构的,如下面这种方案就是错误的。
1.2错误方案:
根据自由度公式计算有:
与原动件数相同,然而在原动件运动过程中,折杆3与上面的机架间会发生干涉,导致运动链无法正常工作。
同理,我们也可以选择减少一个构架和一个运动副(五级副)的方式,如方案②。
根据自由度计算公式,有:
F=3×
(6-3)-4×
与原动件数目相等,又运动链在运动过程中没有干涉现象,故而可以成为机构。
此外,我们可以用将五级副降为四级副的方式来凑出满足运动链成为机构的条件。
但由于篇幅问题,这里就不展开了。
2.题目2-3
某生产线的动力源为匀速转动的电动机,执行构件为往复移动的滑块。
生产工艺要求滑块的运动需具有急回运动特性。
试在图2-3机构运动简图的基础上,根据设计要求完成机构系统简图的设计工作,要求给出2种以上(含2种)设计方案。
2.1题目分析
本题考查对机构急回特性的理解与应用。
机构急回特性的产生需要以下条件:
(1)从动件存在两个极限位置;
(2)主动件在两个极限位置时的极位夹角θ不为0。
而要产生急回特性无外乎两种途径:
设计机构使其运动具有不对称性
设计机构使其位置具有不对称性
其中,运动的不对称性通过四杆机构传递运动即可实现,因为主动杆件与从动杆件的不对称导致了主动杆件的匀速运动传递到从动杆件时已经不是匀速运动,从动杆件再通过一根杆将这种不对称的运动输出即可实现滑块运动的不对称。
另外,通过凸轮机构也可以实现运动的不对称,且能对滑块运动实现更精确的控制。
位置的不对称则可以省去四杆机构,改变主动件位置即可将对称的主动件运动输出为不对称的从动件运动。
这与本题的题目要求不太符合,但也是一种行之有效的方法。
2.2设计方案
双曲柄滑块机构极位夹角示意图
2.2.1双曲柄滑块机构
(1)
第一种方案如上图所示,为在双曲柄机构基础上进行的改进。
主动件1的匀速运动经过连杆的传递到杆3处变为非匀速运动,再经过杆4传递给滑块即实现了非匀速的运动。
且由于去程与回程的不对称性,滑块在两个极限位置时原动件有夹角θ,滑块有急回特性。
2.2.2双曲柄滑块机构
(2)
双曲柄滑块机构
(2)
第二种方案如上图所示,同样为在双曲柄机构基础上进行的改进。
曲柄摇杆滑块机构
2.2.3曲柄摇杆滑块机构
第三种方案如上图所示,为在曲柄摇杆机构基础上进行的改进。
曲柄摆杆滑块机构
2.2.4曲柄摆杆滑块机构
第四种方案如上图所示,为在曲柄摆杆机构基础上进行的改进。
主动件1的匀速运动经过连杆及滑块的传递到杆3处变为非匀速运动,再经过杆4传递给滑块即实现了非匀速的运动。
且由于去程与回程的不对称性,滑块在两个极限位置时原动件有夹角θ,如下图,滑块有急回特性。
2.2.5偏心曲柄滑块机构
第五种方案如上图所示,为偏心曲柄滑块机构。
由于主动件位置的不对称性,主动件1的匀速运动经过连杆滑块3处变为非匀速运动。
且由于去程与回程的不对称性,滑块在两个极限位置时原动件有夹角θ。
如下图,去时走过角度为θ2,返回时主动件转过角度为θ1,极位夹角
,回程速比系数
,滑块有急回特性。
偏心曲柄滑块机构急回特性示意图
2.2.6凸轮机构
第六种方案如上图所示,通过凸轮实现滑块的急回特性。
由于凸轮的不对称性,故可以实现滑块的急回特性。
且通过对凸轮形状的设计,可以实现对滑块运动的精确控制。
3.题目3-1
已知铰链四杆机构如图3-1所示,各杆长度为a=36mm,b=70mm,c=60mm,d=70mm,现欲用它驱动杆件e,使e能从垂直位置向左作30角摆动,杆e的摆动中心与铰链中心D的距离XDE=70mm,YDE=60mm,试设计此铰链四杆机构,并校核其最小传动角min,计算其行程速比系数K。
(比例:
=1mm/mm)
3.1题目分析
首先明确极限位置的意义,极限位置就是在一个运动周期中只出现一次的位置。
若我们设计的杆组可以组成机构,则必然有当e出现在极限位置时,通过连杆驱动e的那根杆也处于某个极限位置,这样运动才是一一对应的、确定的,才能成为机构。
ABCD是一个曲柄摇杆机构。
a,b,c杆都有各自的极限位置(其中曲柄a的每一个位置都可视为其在自己的运动周期中的极限位置),故他们都有可能用来驱动e。
先考虑c-连杆-e的驱动。
找到c在一个周期中的极限位置,如图。
由余弦关系求出
于是将e从垂直推到左倾30度的去程行程角φ1和回程角φ2分别为
行程速比系数K为
如图假定e上的铰链点为F,EF长度为l,通过刚化反转法将F2旋转至F’处,其旋转角度φ3同样可用余弦定理求解
作F’与F1的垂直平分线交C1D于点G1,则G1即为所求c上的铰链点。
于是G2也可求。
若l=60mm,则可以精确地由几何关系解出G点的位置为(已省略计算步骤)
此时极限位置1的传动角为
由此行程的几何关系,最小传动角应为极限位置1处的传动角,即
这个最小传动角很大,完全满足传动条件,其实是由于e上的铰链点F取得很高、EF距离很大的缘故。
若EF减小,则在一定范围内最小传动角γmin也会减小。
铰链点在b(BC)杆或a(AB)杆上的设计方法类似,其中以b杆驱动的行程速比系数K与以c杆驱动的K相等,都为1.347.
四、总结
本次参与讨论课,通过自己分析、设计并与同学们进行讨论,进一步加深了对急回特性本质——运动或位置不对称性——的理解,且考虑到了各种实现急回特性的方案,收获很大。
由于本次题目没有要求,故没有对各个急回装置的参数进行设计,也就没有对回程速比系数K、最小传动角等参数进行设计,而在实际设计中,这些参数还是十分重要的。
以后在再次探讨此类问题的时候,我将会把这些因素考虑进来,在多种方案中选择最优的设计方案。
 升级会员
升级会员 