3dviacomposer机构运动简单教程.docx
《3dviacomposer机构运动简单教程.docx》由会员分享,可在线阅读,更多相关《3dviacomposer机构运动简单教程.docx(11页珍藏版)》请在冰豆网上搜索。
3dviacomposer机构运动简单教程
3dviacomposer机构运动简单教程
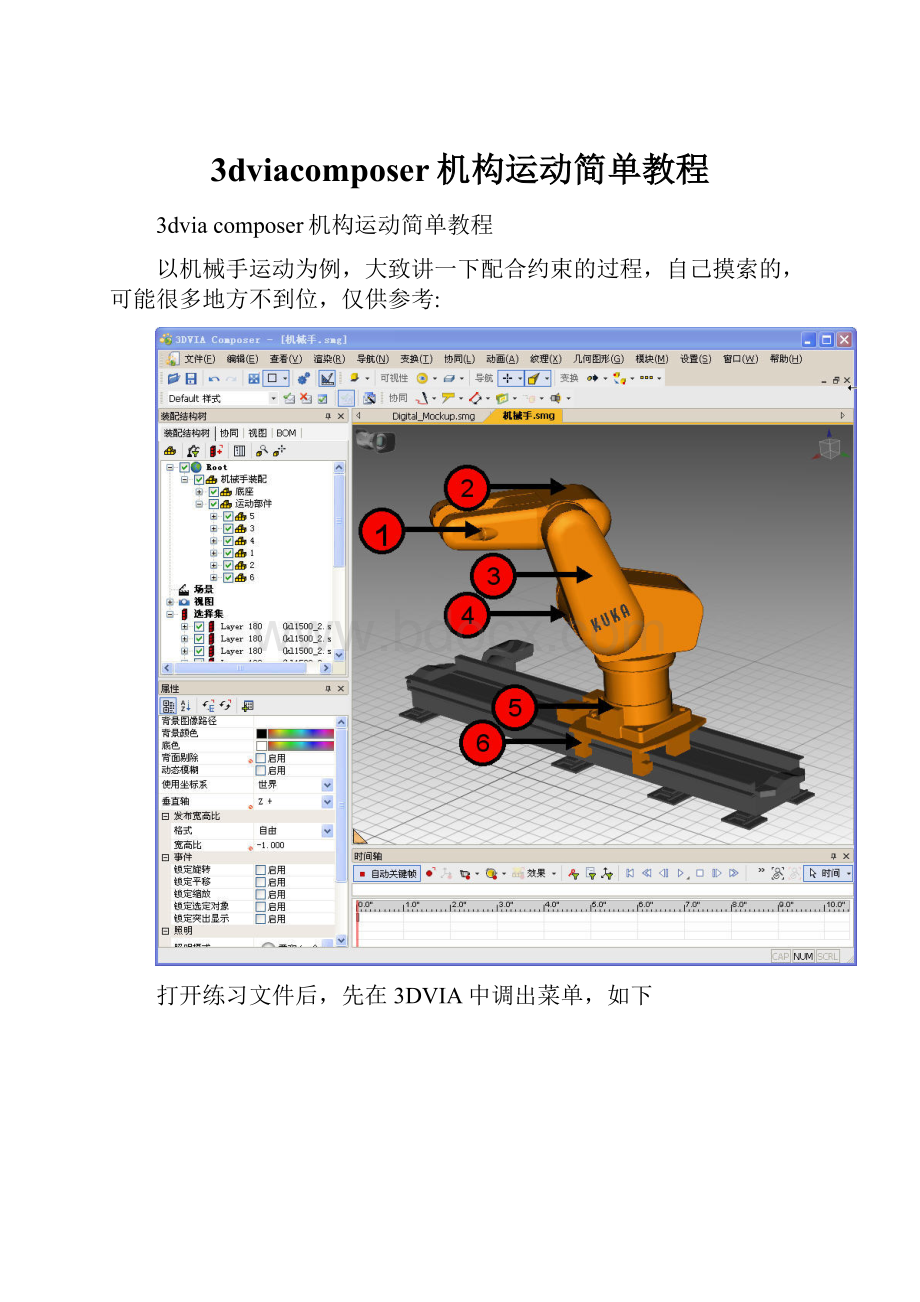
以机械手运动为例,大致讲一下配合约束的过程,自己摸索的,可能很多地方不到位,仅供参考:
打开练习文件后,先在3DVIA中调出菜单,如下
显示自由度
选择零件6,指定链接类型为【线性】,也就是直线运动
调整直线运动的方向,使其沿导轨方向
选择零件5,点击工具栏中【链接选定对象到父级对象】,然后选择零件6。
这个步骤我的理解是用于使零件5、6绑定在一起,同步运动
定义零件5的链接类型为【刚性】
选择零件4,定义链接类型为【枢轴】,也就是旋转配合
假如勾选【受限接合】的“启用”,则可以设置角度,来限制部件运动的角度
同样,将零件4与零件5绑定在一起
剩下的步骤类似之前的定义.
要补充一点:
枢轴的落点有时候需要我们自己重新指定一下,如零件3
 升级会员
升级会员 