整数规划和多目标规划模型.doc
《整数规划和多目标规划模型.doc》由会员分享,可在线阅读,更多相关《整数规划和多目标规划模型.doc(20页珍藏版)》请在冰豆网上搜索。
1整数规划的MATLAB求解方法
(一)用MATLAB求解一般混合整数规划问题
由于MATLAB优化工具箱中并未提供求解纯整数规划和混合整数规划的函数,因而需要自行根据需要和设定相关的算法来实现。
现在有许多用户发布的工具箱可以解决该类问题。
这里我们给出开罗大学的Sherif和Tawfik在MATLABCentral上发布的一个用于求解一般混合整数规划的程序,在此命名为intprog,在原程序的基础上做了简单的修改,将其选择分枝变量的算法由自然序改造成分枝变量选择原则中的一种,即:
选择与整数值相差最大的非整数变量首先进行分枝。
intprog函数的调用格式如下:
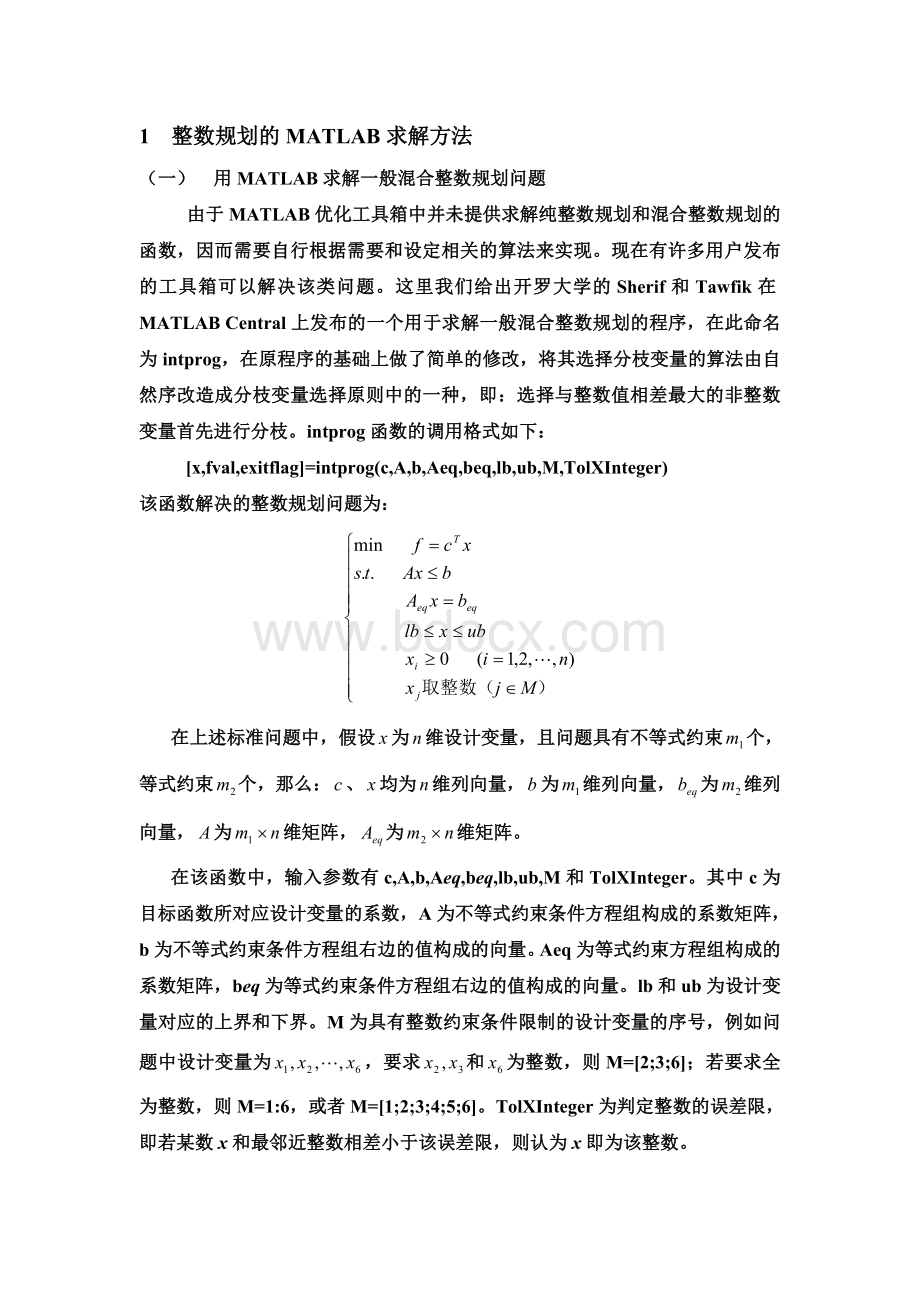
[x,fval,exitflag]=intprog(c,A,b,Aeq,beq,lb,ub,M,TolXInteger)
该函数解决的整数规划问题为:
在上述标准问题中,假设为维设计变量,且问题具有不等式约束个,等式约束个,那么:
、均为维列向量,为维列向量,为维列向量,为维矩阵,为维矩阵。
在该函数中,输入参数有c,A,b,Aeq,beq,lb,ub,M和TolXInteger。
其中c为目标函数所对应设计变量的系数,A为不等式约束条件方程组构成的系数矩阵,b为不等式约束条件方程组右边的值构成的向量。
Aeq为等式约束方程组构成的系数矩阵,beq为等式约束条件方程组右边的值构成的向量。
lb和ub为设计变量对应的上界和下界。
M为具有整数约束条件限制的设计变量的序号,例如问题中设计变量为,要求和为整数,则M=[2;3;6];若要求全为整数,则M=1:
6,或者M=[1;2;3;4;5;6]。
TolXInteger为判定整数的误差限,即若某数x和最邻近整数相差小于该误差限,则认为x即为该整数。
在该函数中,输出参数有x,fval和exitflag。
其中x为整数规划问题的最优解向量,fval为整数规划问题的目标函数在最优解向量x处的函数值,exitflag为函数计算终止时的状态指示变量。
例1求解整数规划问题:
算法:
c=[-1;-1];
A=[-42;42;0-2];
b=[-1;11;-1];
lb=[0;0];
M=[1;2]; %均要求为整数变量
Tol=1e-8; %判断是否整数的误差限
[x,fval]=linprog(c,A,b,[],[],lb,[]) %求解原问题松弛线性规划
[x1,fval1]=intprog(c,A,b,[],[],lb,[],M,Tol) %求最优解整数解
结果:
x= %松弛线性规划问题的最优解
1.5000
2.5000
fval=
-4.0000
x1= %整数规划的最优解
2
1
fval2=
-3.0000
(二)用MATLAB求解0-1规划问题
在MATLAB优化工具箱中,提供了专门用于求解0-1规划问题的函数bintprog,其算法基础即为分枝界定法,在MATLAB中调用bintprog函数求解0-1规划时,需要遵循MATLAB中对0-1规划标准性的要求。
0-1规划问题的MATLAB标准型
在上述模型中,目标函数f需要极小化,以及需要满足的约束条件,不等式约束一定要化为形式为“”。
假设为维设计变量,且问题具有不等式约束个,等式约束个,那么:
、均为维列向量,为维列向量,为维列向量,为维矩阵,为维矩阵。
如果不满足标准型的要求,则需要对原问题进行转化,化为标准型之后才能使用相关函数,标准化的方法和线性规划中的类似。
0-1规划问题的MATLAB求解函数
MATLAB优化工具箱中求解0-1规划问题的命令为bintprog
bintprog的调用格式
x=bintprog(f)
x=bintprog(f,A,b)
x=bintprog(f,A,b,Aeq,beq)
x=bintprog(f,A,b,Aeq,beq,x0)
x=bintprog(f,A,b,Aeq,Beq,x0,options)
[x,fval]=bintprog(...)
[x,fval,exitflag]=bintprog(...)
[x,fval,exitflag,output]=bintprog(...)
命令详解
1)x=bintprog(f)
该函数调用格式求解如下形式的0-1规划问题
2)x=bintprog(c,A,b)
该函数调用格式求解如下形式的0-1规划问题
3)x=bintprog(c,A,b,Aeq,beq)
该函数调用格式求解如下形式的0-1规划问题:
4)x=bintprog(c,A,b,Aeq,beq,x0)
该函数调用格式求解如下形式的0-1规划问题
在前一个调用格式的基础上同时设置求解算法的初始解为x0,如果初始解x0不在0-1规划问题的可行域中,算法将采用默认的初始解
5)x=bintprog(c,A,b,Aeq,beq,x0,options)
用options指定的优化参数进行最小化。
可以使用optimset来设置这些参数
上面的函数调用格式仅设置了最优解这一输出参数,如果需要更多的输出参数,则可以参照下面的调用格式:
[x,fval]=bintprog(...)
在优化计算结束之时返回整数规划问题在解x处的目标函数值fval
[x,fval,exitflag]=bintprog(...)
在优化计算结束之时返回exitflag值,描述函数计算的退出条件。
[x,fval,exitflag,output]=bintprog(...)
在优化计算结束之时返回结构变量output
例2:
求解0-1规划问题
为了程序的可读性,我们用一维下标来表示设计变量,即用表示,用表示,用表示,用表示,于是约束条件和目标函数分别为:
算法:
c=[20;12;33;26;22;15;29;23;21;13;31;24;22;16;32;23];
Aeq=[1111000000000000;
0000111100000000;
0000000011110000;
0000000000001111;
1000100010001000;
0100010001000100;
0010001000100010;
0001000100010001;
];
beq=ones(1,8);
[x,fval]=bintprog(c,[],[],Aeq,beq);
B=reshape(x,4,4);%由于x是一列元素,为了使结果更加直观,故排成与效率矩阵E相对应的形式
B'
fval
结果:
Optimizationterminated.
ans=
0100
0010
1000
0001
fval=
85
整数规划的应用——组件配套问题
某机械产品需要由三个工厂开工一起生产后组装完成。
每件机械需要4个组件1和3个组件2。
生产这两种组件需要消耗两种原材料A和B。
已知这两种原材料的供应量分别为400kg和600kg。
由于三个工厂的生产条件和拥有设备工艺条件不同,每个工厂生产组件的能力和原材料的消耗也不尽相同,且每个工厂开工一次都是配套生产一定数量的组件1和组件2,其具体的数据如表所示。
表11-2各工厂生产能力和消耗原材料的数据表
每个工厂消耗原材料的数量(公斤)
每个工厂各组件的生产能力(件数)
A材料
B材料
组件1
组件2
工厂1
工厂2
工厂3
9
6
4
7
10
9
8
7
9
6
9
5
现在的最优化问题是,这三个工厂应当如何安排生产,才能使该产品的配套数达到最大?
(Ⅰ)组件配套问题的建模
设和是三个工厂分别开工的次数,将其作为该问题的设计变量。
由于每个工厂开工一次都是配套生产,故每次开工消耗的原材料一定,且生产的组件数也是一定的。
在这个假设的前提之下,我们可以得出该问题的目标函数和约束条件。
因为原材料的总量是有限的,根据工厂的开工次数,可得工厂1将消耗材料,工厂2将消耗材料,工厂3将消耗材料,故有约束条件:
同理,对于材料的总量约束条件可以表达为:
然后再来分析三个工厂零件生产的情况,三个工厂生产的组件1的数量分别为和,故组件1的总数为:
同理,组件2的总数为:
下一步是分析目标函数,该问题要求的不是生产的各种组件总数最多,而是要求产品的配套数量最大,即能组成的机械数目最多。
问题中已经给出了该种机械中两种组件的配比为4:
3,故组件1所能成套的数目满足约束条件:
同理,组件2所能成套的数目满足约束条件:
因而,所能组成的成品机械的数目应该为和中的较小值,即:
那么,我们求解的目标即是使得能够尽可能大,可以看出,这种形式并不是有关设计变量的线性函数,我们需要对其进行转化,此时我们可以令一个人工设计变量等于目标函数值,则有:
在该假设下,一定满足关系式:
且
结合约束关系,对的约束可以表示为:
同理,对的约束可以表示为:
对的上述关系进行整理,可以得到关系:
同理对也可以得到不等式关系为:
上面两个式子即为由组件的配比数得到的关于组件数目的约束条件,此时问题的目标就是如何使得取到最大值,由于开工的次数一定是一个非负整数,故也是一个约束条件,决定了该问题是一个纯整数规划问题。
结合前面给出的原材料约束,可以得到如下的数学模型:
(Ⅱ)组件配套问题的求解
利用§8.1节中给出的MATLAB函数对此问题求解,代码和运行结果如下:
算法:
%目标函数所对应的设计变量的系数,为转化为极小,故取原目标函数的相反数
f=[0;0;0;-1];
%不等式约束
A=[9640;
71090;
-8-7-94;
-6-9-53];
b=[400;600;0;0];
%边界约束,由于无上界,故设置ub=[Inf;Inf;Inf;Inf];
lb=[0;0;0;0];
ub=[Inf;Inf;Inf;Inf];
%所有变量均为整数变量,故将所有序号组成向量M
M=[1;2;3;4];
%判定为整数的误差限
Tol=1e-8;
%求最优解x和目标函数值fval,并返回状态指示
[x,fval,exitflag]=intprog(f,A,b,[],[],lb,ub,M,Tol)
结果:
x= %最优解向量x
18
15
36
141
fval=%在最优解向量x处,原目标函数值的相反数
-141.000
exitflag=%算法终止指示变量,说明问题收敛到了最优解x
1
由运行结果可知,工厂1、2和3需要分别开工18、15和36次,这样所能生产出来的成套的机械为141件。
2多目标规划的MATLAB求解方法
(一)多目标规划的MATLAB求解
由于多目标规划中的求解涉及
 升级会员
升级会员 