哈工大机械原理大作业一凸轮23题Word文档下载推荐.docx
《哈工大机械原理大作业一凸轮23题Word文档下载推荐.docx》由会员分享,可在线阅读,更多相关《哈工大机械原理大作业一凸轮23题Word文档下载推荐.docx(12页珍藏版)》请在冰豆网上搜索。
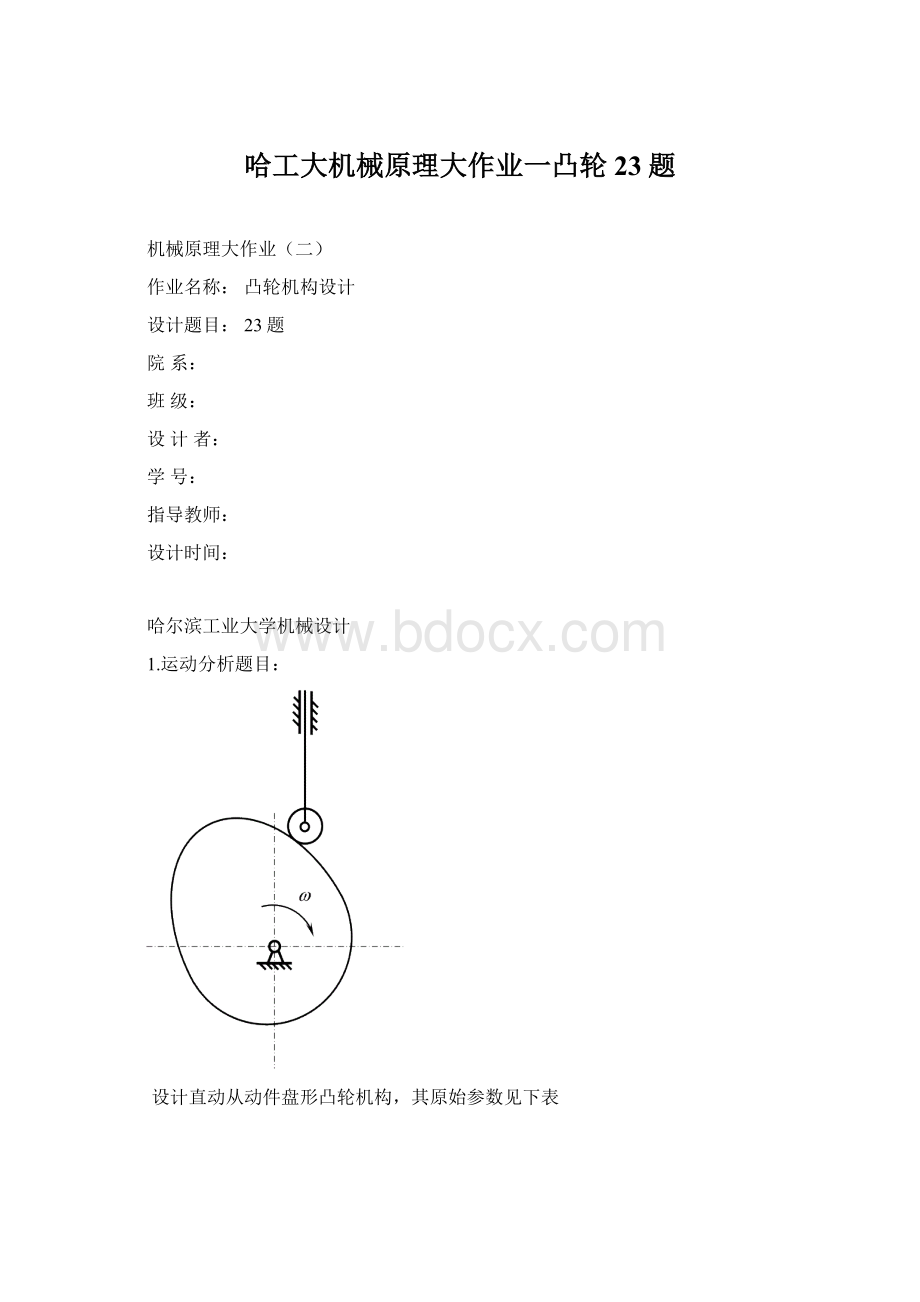
120mm
120°
余弦加速度
35°
90°
3-4-5多项式
65°
80°
70°
2.确定凸轮机构推杆升程、回程运动方程(设定角速度为ω=10rad/s)
升程:
0°
<
Φ<
120°
由公式可得:
s=60-60*cos(3*Φ/2);
v=90*ω*sin(3*Φ/2);
a=135*ω2*cos(3*Φ/2);
远休止:
200°
s=120;
v=0;
a=0;
回程:
200°
290°
s=h[1-(10T23-15T24+6T25)]
v=(-30hω1/Φ0'
)T22(1–2T2+T22)
a=(-60hω12/Φ0'
2)T2(1–3T2+2T22)
式中:
T2=(Φ-Φ0-Φs)/Φ0'
近休止:
360°
s=0;
3.绘制推杆位移、速度、加速度线图(设ω=10rad)
1)推拉位移曲线
代码:
%推拉位移曲线;
x=0:
(pi/1000):
(2*pi/3);
s1=60-60*cos(1.5*x);
y=(2*pi/3):
(10*pi/9);
s2=120;
z=(10*pi/9):
(29*pi/18);
T2=(z-10*pi/9)*2/pi;
s3=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));
m=(29*pi/18):
(2*pi);
s4=0;
plot(x,s1,'
b'
y,s2,'
z,s3,'
m,s4,'
);
xlabel('
角度(rad)'
ylabel('
行程(mm)'
title('
推拉位移曲线'
grid;
2)推杆速度曲线
%推杆速度曲线;
w=10;
v1=90*w*sin(1.5*x);
v2=0;
v3=(-30*120*w/(pi/2))*T2.^2.*(1-2*T2.^2+T2.^2);
%v3=-120*w*sin(2*z-20*pi/9);
v4=0;
plot(x,v1,'
r'
y,v2,'
z,v3,'
m,v4,'
速度(mm/s)'
推杆速度曲线(w=10rad/s)'
3)凸轮推杆加速度曲线
%凸轮推杆加速度曲线;
a1=135*w^2*cos(3*x/2);
a2=0;
a3=(-60*120*w^2/(pi/2)^2)*T2.*(1-3*T2.^2+2*T2.^2);
a4=0;
plot(x,a1,'
m'
y,a2,'
z,a3,'
m,a4,'
加速度(mm/s^2)'
凸轮推杆加速度曲线(w=10rad/s)'
4)绘制凸轮机构的𝐝
𝐬
/𝒅
𝛗
−𝐬
线图,并依次确定凸轮的基圆半径和偏距
%𝐝
线图,确定e,s0;
ns1=90*sin(1.5*x);
ns2=0;
s3n=120*(1-(10*T2.^3-15*T2.^4+6*T2.^5));
ns3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4;
ns4=0;
x1=0:
pi/36000:
pi/2;
s1n=60-60*cos(1.5*x1);
v1=90*sin(1.5*x1);
m1=diff(s1n);
%求切线1
n1=diff(v1);
z=m1./n1;
fori=1:
length(z);
ifabs(z(i)+tan(-55*pi/180))<
0.001;
break
end
end
i;
b11=s1n(i)-z(i)*v1(i);
x1=-300:
200;
y01=z(i)*x1+b11;
%切线1
k1=z(i);
plot(x1,y01)
x3=10*pi/9:
14*pi/9;
%求切线2
v3=-120*10*3*T2.^2+120*15*4*T2.^3-120*6*5*T2.^4;
m3=diff(s3n);
n3=diff(v3);
p=m3./n3;
foro=1:
length(p);
ifabs(p(o)-tan(-25*pi/180))<
0.01;
o;
b33=s3n(o)-p(o)*v3(o);
x3=-300:
700;
y03=p(o)*x3+b33;
%切线2
plot(x3,y03);
symuv
[u,v]=solve('
u=1.4281*v-81.7665'
'
u=-0.4663*v-59.6715'
%v=11.66332347972972972972972972973x
%u=-65.110107738597972972972972972973y
plot(ns1,s1,'
ns2,s2,'
ns3,s3n,'
ns4,s4,'
x1,y01,'
g'
x3,y03,'
v,u,'
*'
ds/d¦
µ
'
S'
axis([-300,200,-300,300]);
s0,e的确定'
确定凸轮基圆半径与偏距:
偏距e=90mm,s0=120mm;
基圆半径为r0=150mm。
5)滚子半径的确定及凸轮理论廓线和实际廓线的绘制
(1)计算最小曲率半径
%计算最小曲率半径
v=[];
symsx1x2x3x4x5
s0=150;
e=90;
s1=60-60*cos(1.5*x1);
t1=(s1+s0).*cos(x1)-e*sin(x1);
y1=(s0+s1).*sin(x1)-e*cos(x1);
tx1=diff(t1,x1);
txx1=diff(t1,x1,2);
yx1=diff(y1,x1);
yxx1=diff(y1,x1,2);
forxx1=0:
(pi/100):
k1=subs(abs((tx1*yxx1-txx1*yx1)/(tx1^2+yx1^2)^1.5),{x1},{xx1});
v=[v,1/k1];
t2=(s2+s0).*cos(x2)-e*sin(x2);
y2=(s0+s2).*sin(x2)-e*cos(x2);
tx2=diff(t2,x2);
txx2=diff(t2,x2,2);
yx2=diff(y2,x2);
yxx2=diff(y2,x2,2);
forxx2=(2*pi/3):
k2=subs(abs((tx2*yxx2-txx2*yx2)/(tx2^2+yx2^2)^1.5),{x2},{xx2});
v=[v,1/k2];
s3=60+60*cos(2*x3-20*pi/9);
t3=(s3+s0).*cos(x3)-e*sin(x3);
y3=(s0+s3).*sin(x3)-e*cos(x3);
tx3=diff(t3,x3);
txx3=diff(t3,x3,2);
yx3=diff(y3,x3);
yxx3=diff(y3,x3,2);
forxx3=(10*pi/9):
k3=subs(abs((tx3*yxx3-txx3*yx3)/(tx3^2+yx3^2)^1.5),{x3},{xx3});
v=[v,1/k3];
t4=(s4+s0).*cos(x4)-e*sin(x4);
y4=(s0+s4).*sin(x4)-e*cos(x4);
tx4=diff(t4,x4);
txx4=diff(t4,x4,2);
yx4=diff(y4,x4);
yxx4=diff(y4,x4,2);
forxx4=(29*pi/18):
k4=subs(abs((tx4*yxx4-txx4*yx4)/(tx4^2+yx4^2)^1.5),{x4},{xx4});
v=[v,1/k4];
min(v)
编写程序算出最小曲率半径,程序输出结果为ans=15.0041,即最小曲率半径为ρ=15.0041mm;
则滚子半径可以取r𝑟
=ρ/2≈7.5mm。
5)凸轮理论廓线和实际廓线的绘制
%绘制凸轮轮廓曲线;
s0=80;
e=20;
rr=16;
x1=(s0+s1).*cos(x)-e*sin(x);
y1=(s0+s1).*sin(x)+e*cos(x);
dx1dx=-140*sin(x)+90*sin(1.5*x).*cos(x)+60*cos(1.5*x).*sin(x)-20*cos(x);
dy1dx=140*cos(x)+90*sin(1.5*x).*sin(x)-60*cos(1.5*x).*cos(x)-20*sin(x);
a1=sqrt(dx1dx.^2+dy1dx.^2);
Xn1=x1-rr*(dy1dx)./a1;
Yn1=y1+rr*(dx1dx)./a1;
x2=(s0+s2).*cos(y)-e*sin(y);
y2=(s0+s2).*sin(y)+e*cos(y);
dx2dy=-200*sin(y)-20*cos(y);
dy2dy=200*cos(y)-20*sin(y);
a2=sqrt(dx2dy.^2+dy2dy.^2);
Xn2=x2-rr*(dy2dy)./a2;
Yn2=y2+rr*(dx2dy)./a2;
x3=(s0+s3).*cos(z)-e*sin(z);
y3=(s0+s3).*sin(z)+e*cos(z);
dx3dz=-140*sin(z)-120*sin(2*z-20*pi/9).*cos(z)-60*cos(2*z-20*pi/9).*sin(z)-20*cos(z);
dy3dz=140*cos(z)-120*sin(2*z-20*pi/9).*sin(z)+60*cos(2*z-20*pi/9).*cos(z)-20*sin(z);
a3=sqrt(dx3dz.^2+dy3dz.^2);
Xn3=x3-rr*(dy3dz)./a3;
Yn3=y3+rr*(dx3dz)./a3;
x4=(s0+s4).*cos(m)-e*sin(m);
y4=(s0+s4).*sin(m)+e*cos(m);
dx4dm=-80*sin(m)-20*cos(m);
dy4dm=80*cos(m)-20*sin(m);
a4=sqrt(dx4dm.^2+dy4dm.^2);
Xn4=x4-rr*(dy4dm)./a4;
Yn4=y4+rr*(dx4dm)./a4;
plot(x1,y1,'
x2,y2,'
x3,y3,'
x4,y4,'
Xn1,Yn1,'
Xn2,Yn2,'
Xn3,Yn3,'
Xn4,Yn4,'
X/mm'
Y/mm'
凸轮理论/实际轮廓曲线'
外面一圈为理论廓线,里面一圈为实际廓线
 升级会员
升级会员 