计算机控制技术第二版课后习题答案王建华主编Word文件下载.docx
《计算机控制技术第二版课后习题答案王建华主编Word文件下载.docx》由会员分享,可在线阅读,更多相关《计算机控制技术第二版课后习题答案王建华主编Word文件下载.docx(13页珍藏版)》请在冰豆网上搜索。
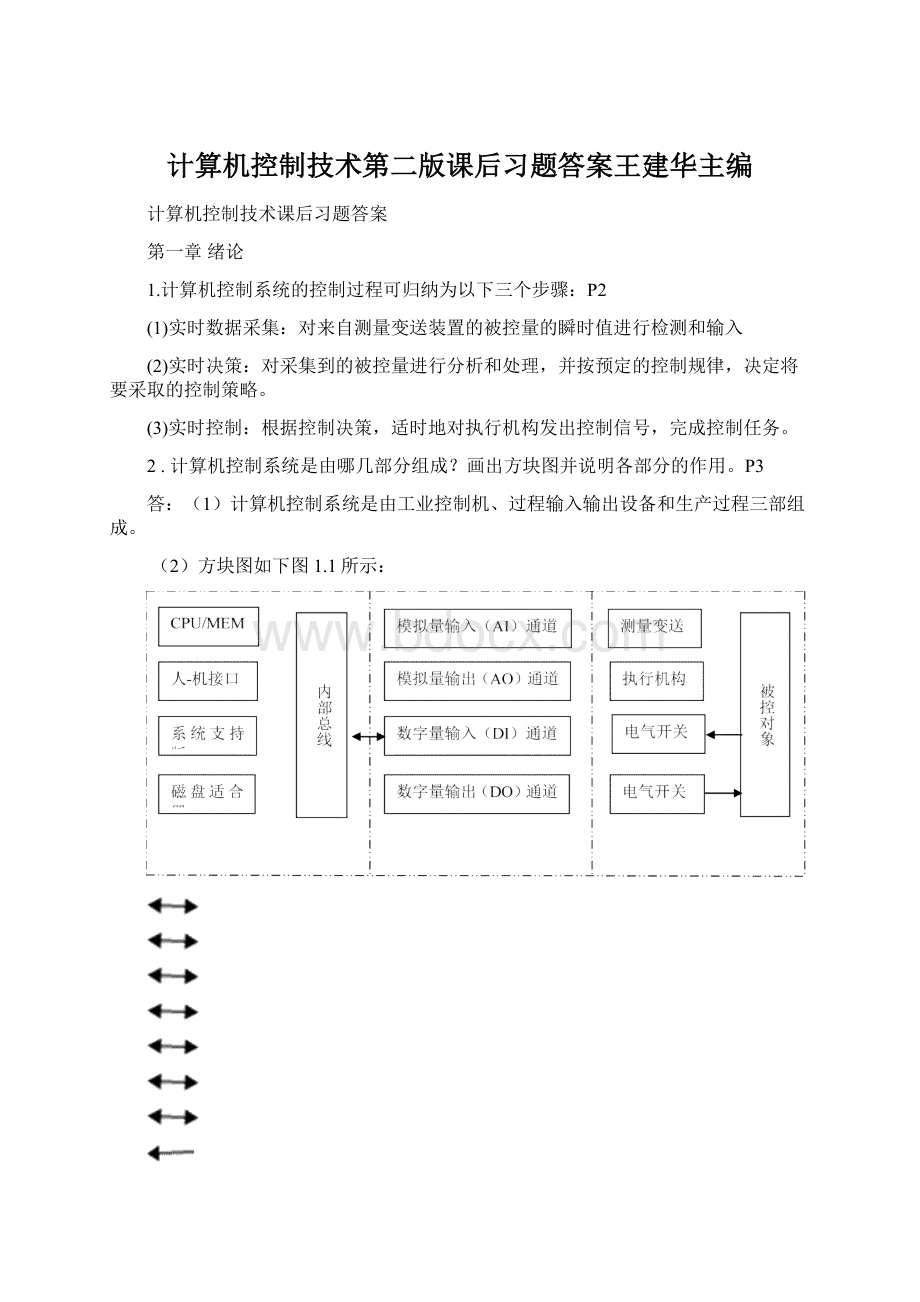
4.计算机控制系统有哪几种典型形式?
各有什么主要特点?
P4~7
(1)操作指导系统(OIS)
优点:
结构简单、控制灵活和安全。
缺点:
由人工控制,速度受到限制,不能控制多个对象。
(2)直接数字控制系统(DDC)
实时性好、可靠性高和适应性强。
(3)监督控制系统(SCC)
生产过程始终处于最有工况。
(4)集散控制系统
分散控制、集中操作、分级管理、分而自治和综合协调。
DCS是积木式结构,构成灵活;
易于扩展;
系统的可靠性高;
操作、监视方便;
处理信息量大;
与计算机集中控制方式相比,电缆和敷缆成本较低,便于施工。
(5)现场总线控制系统
FCS用二层结构完成了DCS中的三层结构功能,降低了成本,提高了可靠性,国际标准统一后,可实现真正的开放式互连系统结构。
(6)PLC+上位系统
通过预先编制控制程序实现顺序控制,用PLC代替电器逻辑,提高了控制是现代灵活性、功能及可靠性。
第2章
1.什么是工业控制计算机?
它们有哪些特点?
P10~11
工业控制计算机是“应用在国民经济发展和国防建设的各个领域,具有恶劣环境适应能力,能长期稳定稳定工作的加固型计算机”.
其特点是:
①可靠性高②实时性好③环境适应性强④模块化设计,完善的I∕O通道
⑤系统扩充性好⑥系统开放性好⑦控制软件包功能强。
2.总线(BUS):
是功能部件之间实现互连的一组公共信号线,用作相互间信息交换的公共信道。
P12
总线分为内部总线和外部总线。
P13
外部总线:
串行总线、并行总线
内部总线:
1.数据总线2.地址总线3.控制总线4.电源线与地线
3.工业控制机分类P14
①.PC总线工控机②.STD总线工控机③.VME总线工控机④.多总线工控机
4.总线标准P15
㈠①.STD总线②.ISA总线③.PCI总线④.PC/104总线
㈡国际上总线标准主要有:
VME总线、MultiBus总线、STD总线、PC总线及PCI总线等
第3章
1.A/D转换的主要性能指标:
:
转换时间、分辨率、线性误差、量程、对基准电源的要求等。
P32
2.模拟量输入通道一般由I/V变换、多路转换器、程控放大器、采样/保持器、A/D转换器、接口及控制逻辑电路组成。
(P39图3.4)
3.一个10位A/D转换器(量化精度0.1%),孔径时间为10us,如果要求转换误差在转换器的转换精度内,则允许转换的正弦波模拟信号的最大频率为P43
一个8位A/D转换器,孔径时间为100us,如果要求转换误差在A/D转换器的转换精度(0.4%)内,求允许转换的正弦波模拟信号的最大频率是多少?
P85
4.隔离方式:
变压器隔离、继电器隔离和光电隔离。
P46~48
常用的隔离放大器:
1.变压器耦合隔离放大器光耦合隔离放大器
2.数字量光耦合隔离放大器
5.模拟量输入通道的隔离主要有模拟隔离和数字隔离P49
6.D/A性能的主要参数:
1.分辨率2.转换时间3.精度4.线性度P51
7.模拟量输出通道由接口电路、D/A转换器、U/I变换等组成。
P57
8.开关量:
按类型分有电平式和触点式两种.P61
按电源分有有源和无源两种.
9.无论是A/D转换还D/A转换其分辨率可表示为D=1/(2n-1)P71
若所要求的分辨率为D,则字长
Eg:
某温度控制系统的温度范围为0~600℃,要求分辨率为0.5℃,
求出A/D转换器
字长:
因此,取A/D转换器字长为12bit。
10.为了避免低电平模拟信号传输带来的麻烦,进场要将测量元件的输出信号经变送器变送器,如:
温度变送器、压力变送器、流量变送器等,将温度、压力、流量的电信号变成0~10mA或4~20mA的统一信号,然后经过模拟量输入通道来处理。
P38
11、数字量输入(DI)通道中,信号调整电路的功能有两个,一是克服开关或触点通断是的抖动;
二是进行信号隔离。
12、信号调理是指将现场输入信号经过隔离放大,成为工控机能够接收到的统一信号电平以及将计算机输出信号经过放大、隔离转换成工业现场所需的信号电平的处理过程。
P69
第4章
1.数字滤波P86`90
②中位值滤波法
中位值滤波就是对某一被测参数连续采样n次(一般n取奇数),然后把n次采样值按大小排队,取中间值为本次采样值。
假如,采样值是:
y1、y2、y3,且有y1≤y2≤y3,则y2作为本次采样的有效信号。
中位值滤波能有效地克服脉冲干扰,对缓慢变化的过程有良好的效果。
④递推平均滤波法
把N个采样数据看成一个队列,长度固定为N,每次采样,把采样结果放入队尾,扔掉队首的数据,把队列中的N个数据进行算术平均其数学表达式为:
式中,n——第n次采样值经滤波后的输出;
yn-i——未经滤波的第n-i次采样值;
N——递推平均项数。
对周期性干扰有良好的抑制作用,平滑度高,灵敏度低;
不易消除脉冲干扰,而适用于高频振荡的系统。
⑤加权递推平均滤波法
加权递推平均滤波算法;
对不同时刻的数据加以不同的权,通常越接近现时刻的数据;
权取得越大,N项加权递推平均滤波算法为
式中,C0,C1,……,CN-1为常数,且满足如下条件
C0十C1+……+CN-1=1并C0>C1>……>CN-1>0
常系数C0,C1,……,CN-1选取有多种方法,其中最常用的是加权系数法。
设τ为对象的纯滞后时间,且
R=1+e-τ+e-2τ+……+e-(N-1)τ
τ越大,R越小,则给予新的采样值的权系数就越大,提高新的采样值在平均过程中的比重。
适用于有较大纯滞后时间常数的对象和采样周期较短的系统。
⑥一阶惯性滤波法
一阶惯性滤波算法为
式中:
yn——未经滤波的第n次采样值;
Tf——滤波时间常数;
T——采样周期。
根据一阶惯性滤波的频率特性,若滤波系数α越大,则带宽越窄,滤波频率也越低。
2.标度变换P91
线性参数的标度变换:
一次仪表测量值与A/D转换结果具有线性关系
标度变换公式为:
A0——一次测量仪表的下限;
Am——一次测量仪表的上限;
Ax——实际测量值(工程量);
N0——仪表下限对应的数字量;
Nm——仪表上限对应的数字量,
Nx——测量值所对应的数字量。
其中A0,Am,N0,Nm对于某一个固定的被测参数来说是常数,
Eg1:
某热处理炉温度测量仪表的量程为200~800℃,在某一时刻计算机采样并经数字滤波后的数字量为0CDH.求此时温度值为多少?
(设仪表量程为线性,A/D转换为8位)
解:
已知A0=200℃,Am=800℃,Nx=0CDH=205,Nm=0FFH=255,根据式(4.10),此时温度为:
Eg2:
某热处理炉温度变化的范围为0~1350℃,在某一时刻计算机采样并经AD574A转换后的数字量为56AH.求此时炉内的温度值为多少?
(设仪表量程为线性的)P36
解:
已知A0=0℃,Am=1350℃,Nx=56AH=1386,Nm=FFFH=4095,则此时温度为:
3.积分饱和抑制常用的方法是积分分离PID控制和抗积分饱和算法。
P95~96
区别:
积分分离算法进行分离的依据是PID控制器的输入偏差e(k),而抗积分饱和算法的抗积分饱和依据是抗积分饱和算法系统最终的控制输出u(k)。
“大偏差时不积分(积分分离),输出超限时也不积分(抗饱和)”。
4.控制规律的选择P113~114
对于特性为一阶惯性纯滞后、二阶惯性纯滞后的控制对象,PID控制是一种最优的控制算法。
根据分析可以得出如下几点结论:
(1)一阶对象,负荷变化不大,工艺要求不高,可采用P控制;
如,压力、液位、串级副回路等。
(2)一阶与纯滞后串联的对象,负荷变化不大,要求精度较高,可采用PI控制。
如,压力、流量、液位控制。
(3)纯滞后时间τ较大,负荷变化也较大,控制要求高的场合,可采用PID控制。
如,过热蒸汽温度控制,
PH值控制。
(4)对象为高阶(二阶以上)又有纯滞后特性,负荷变化较大,控制要求也高时,应采用串级控制,前馈一反馈、前馈一串级或纯滞后补偿控制。
5.PID归一参数的整定法是一种简易的整定法。
P116
位置式PID算法:
设PID的增量算式为
式中KP为比例系数;
T为采样周期;
Ti为积分时间常数;
TD为微分时间常数;
Ki=KP/Ti为积分系数;
KD=KP*TD为微分系数。
据上表的Ziegler-Nichols整定式可得:
T≈0.1Ts
Ti≈0.5Ts
Td≈0.125Ts
式中Ts是纯比例控制时的临界振荡周期。
则有:
第5章
1.干扰信号的来源:
P138
工业控制计算机系统的干扰可以分为三类,即:
电源干扰、空间干扰、设备干扰。
①电源干扰主要有:
浪涌、尖峰、噪声和断电。
②空间干扰:
静电和电场的干扰、磁场干扰、电磁辐射干扰。
③设备干扰:
工模干扰或差模干扰。
2.干扰信号的耦合方式:
P139
①、静电耦合方式;
其作用机理是一根导线在另一根导线的静电场中时,必然受到该电场的影响。
②、电磁耦合方式;
在设备外部,当两根导线在较长的距离内敷设或架设时,将会生产电磁耦合干扰。
③、共阻抗耦合方式;
当两个电路的电流流经一个公共阻抗时,一个电路在该阻抗上所产生的电压降会影响到另一个电路,该种耦合方式称为公共耦合方式。
④、电磁场辐射耦合方式;
电磁场辐射干扰是一种无规则的干扰,它极易通过电源而耦合到系统中来。
另外,过长的信号输入线和输出线以及控制线具有天线效应,她们既能接收干扰波,又能辐射干扰波。
3.空间抗干扰的措施:
P141
①空间隔离:
使敏感设备或信号线远离干扰源。
②屏蔽:
对敏感电路加屏蔽盒或对信号加屏蔽层。
③电气布线:
合理选择信号线,并在实际施工中正确地敷设信号线来抑制干扰。
4.过程通道的干扰时如何产生的?
如何对它们抑制?
1)强烈的干扰往往沿着过程通道进入计算机,其主要原因是过程通道与计算机之间存在公共地线。
2)干扰的作用方式,一般可分为串模干扰和共模干扰。
P146~149
抑制串模干扰的主要措施:
①采用输入滤波器②进行电磁屏蔽和良好的接地
③选择合适的A/D转换器④使用电流信号传输
抑制共模干扰的主要措施:
①采用差分放大器作信号前置放大
②采用隔离技术将地电位隔开③利用浮地屏蔽
5.什么是系统的可靠性,提高计算机控制系统的可靠性有哪些主要途径?
可靠性是指机器、零件或系统,在规定的工作条件下,在规定的时间内具有正常工作性能的能力。
狭义的可靠性是指一次性使用的机器、零件或系统的使用寿命。
计算机控制系统的可靠性是指广义的可靠性。
它是可修复的机器、零件或系统,在使用中不发生故障,一旦发生故障又易于修复,使之具有经常使用的性能。
P157
1.提高计算机控制系统硬件可靠性的措施:
P160~161
(1)冗余结构设计
(2)不易发生故障的硬件设计:
①对元部件进行严格筛选,使用可靠的单个元件,并对元件进行多道老化和严格检验,按可靠性标准检查全部元器件;
②充分重视元部件安装的机械强度,以使机械运动(如振动)不会引起导线或焊接区的断裂。
此外,对必要的元部件应机械加固;
③对组件采取涂漆和浇注处理可进一步提高机械紧固性;
④插座是发生故障的最常见因素,因此,应尽量少用插座,并采用大的插座;
⑤抗温升保护,多数电子器件对温度变化比较敏感,设计足够的通风系统和采用温度补偿措施。
2.提高计算机控制系统软件可靠性的措施:
P161~163
(1)分散结构设计;
(2)容错技术。
实现软件容错的基本活动有四个:
故障检测、损坏估计、故障恢复和缺陷处理。
(3)指令亢余:
是利用消耗时间资源来达到对系统的容错目的。
(4)信息亢余
(5)标准化:
采用标准化软件可以提高软件运行的可靠性。
6.噪声感应电压的计算公式为
P140
式中j为虚数单位;
ω=2πf;
M为互感系数;
Ing为回路感应电流I=P/U
Eg:
某信号线与电压为220V、负荷为10kV·
A的输电线的距离为1.2m,并平行走线10m,连线之间互感为3.6µ
H,计算出信号线上感应的干扰电压
为
第6章
1.控制网络与IT网络的区别:
P168
1)控制网络的实时性:
IT网络不考虑实时性,但在控制网络中实时性是基本的要求;
2)网络结构线状化:
IT网络的结构是网络状的,从一点到另外一点的通信路径可以是不固定的但在大多数控制网络中,从一点到另外一点的通信路径大多是固定的。
3)工业环境使用场合:
IT网络一般在办公室、家庭等环境非常好的场所使用,而控制网络是在环境恶劣的工业环境下使用的。
4)控制网络的技术特点:
控制网络与IT网络比较还具有以下技术特点:
①良好的实时性与时间确实性。
②转送信息多为短帧信息,且信息交换频繁。
③容错能力强,可靠性、安全性好。
④控制网络协议简单实用,工作效率高。
⑤控制网络结构具有高度分散性。
⑥控制设备的智能化与控制功能的自治性。
⑦与信息网络之间有高效率的通信,易于实现与信息系统的集成。
2.计算机网络的基本功能:
①数据通信②资源共享③增加系统的可靠性④提高系统处理能力⑤实现分布式处理
3.TCP/IP协议共分4层:
①网络接口层、②网际层、③传输层、④应用层
4.现场总线是一种用于底层工业控制和测量设备之间连接的数字式、串行、多点通信的数据总线。
5.传输数据的信号:
①、模拟数据采用模拟信号传输P171
②、数字数据采用模拟信号传输
③、数字数据采用数字信号传输
④、模拟数据采用数字信号传输
6.数据通信中的同步:
①、位同步;
②、字符同步;
P173
7.通信媒体共享技术:
①、多路复用技术;
②、集线技术;
③、多点线路技术;
P175
8.介质访问控制技术:
①、CSMA/CD的控制原则是各节点采用竞争方法获取发送信息的权利。
P185
②、退避算法有以下三种类型:
a、非坚持CSMA;
b、I-坚持CSMA;
c、P-坚持CSMA;
③、CSMA/CD方法是一种“先听后发,边听边发”的介质访问控制技术,其要点可以归纳如下:
按CSMA方式监听总线、进行发送;
如果在发送期间检测到冲突,则停止本次发送,并向总线上发一串阻塞信号;
发送阻塞信号后,等待一段随机时间,在采用CSMA方式重发。
9.常用的三种编码方式是不归零制编码、曼彻斯特编码和微分曼切斯特编码。
P172
图3-17不归零码、曼彻斯特编码和微分曼彻斯特编码的码形图对比
不归零制编码规律:
“1”高电平;
“0”低电平。
曼彻斯特编码规律:
每位二进制位中间有一个电平跳变,从高到低的跳变表示“0”,从低到高的跳变表示“1”。
微分曼切斯特编码规律:
每位二进制位中间也有一个电平跳变,但不用这个跳变来表示数据,只用来作为同步的时钟信号,所以它也是一中自同步编码;
每个二进制位开始时有无跳变来表示“0”或“1”,有跳变表示“0”,无跳变表示“1”。
(注:
文档可能无法思考全面,请浏览后下载,供参考。
可复制、编制,期待你的好评与关注!
)
 升级会员
升级会员 