PID算法优化Word下载.docx
《PID算法优化Word下载.docx》由会员分享,可在线阅读,更多相关《PID算法优化Word下载.docx(8页珍藏版)》请在冰豆网上搜索。
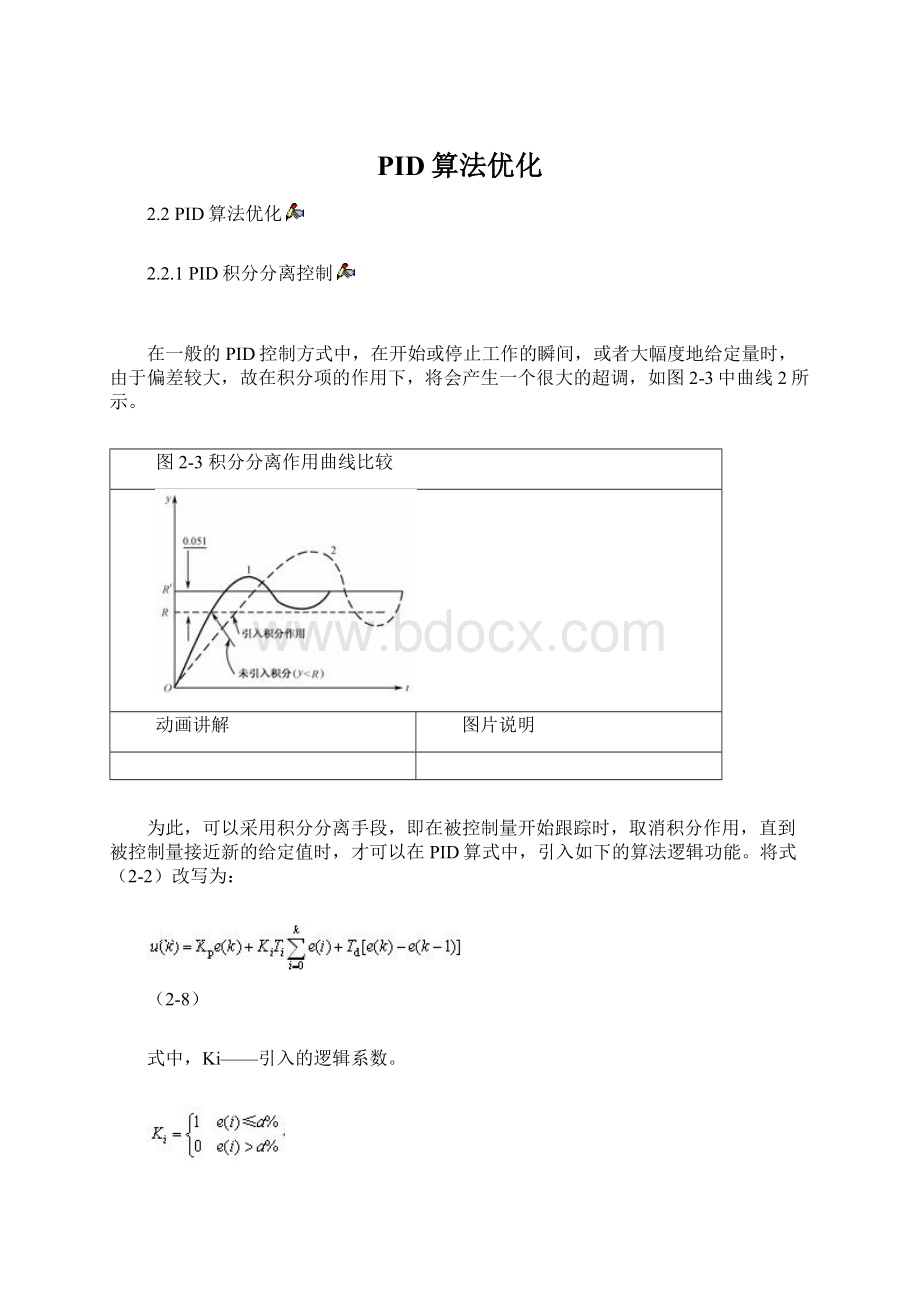
为此,可以采用积分分离手段,即在被控制量开始跟踪时,取消积分作用,直到被控制量接近新的给定值时,才可以在PID算式中,引入如下的算法逻辑功能。
将式(2-2)改写为:
(2-8)
式中,Ki——引入的逻辑系数。
图中曲线1为采用了积分分离手段后的控制过程。
比较曲线1和2可见,应用积分分离方法后,显著降低了被控制量的超调量,并缩短了调节时间。
2.2.2可变增量PID控制
工业控制系统有时会提出这样的要求,PID算法的增益是可变的,以补偿手控过程的非线性因素。
这时,控制算法为:
(2-9)
可变增益PID控制器可等效为如图2-4所示方框图。
其结构图相当于PID控制器再串联一个非线性函数部分。
实现可变增益PID算法的程序流程图如图2-5所示。
图2-4可变增益PID方框图
图2-5可变增益PID算法程序流程图
2.2.3时间最优的PID控制
时间最优控制又称快速控制,即控制系统的给定值由一个状态运动到另一个状态所经历的过渡时间最短。
从理论上可以证明,对于一个线性定常控制系统,有:
(2-10)
(2-11)
式中,X(t)——状态向量。
u(t)——控制向量。
y(t)——输出向量。
A,B,C——常数矩阵。
由初始状态
,到终端状态
的时间最短,即:
(2-12)
(约束条件:
)
所要求的最优控制作用是:
显然是一个开关函数。
对于一个n阶的系统,要实现上述控制目标,至多开关(n-1)次。
在工业自动化应用中,最有发展前途的是Bang-Bang与反馈控制相结合的控制系统,即:
(2-13)
相应的计算机控制简单流程图如图2-6所示。
图2-6复式快速控制流程图
2.2.4智能PID控制
模糊控制、神经网络控制和专家控制是目前智能控制研究中最为活跃的领域,本小节就其组成的几种典型智能PID控制系统的基本结构、原理及特点分别进行介绍。
1.模糊PID控制
模糊控制系统是以模糊数学、模糊语言形式的知识表示和模糊逻辑的规划推理为理论基础,采用计算机控制技术构成的一种具有反馈通道的数字控制系统。
它的组成核心是具有智能性的模糊控制器。
1)混合型模糊PID控制器
图2-7所示模糊控制器结构是由W.L.Bialkowski于1983年提出的,它是由一个常规积分控制器和一个二维模糊控制器相并联而构成的。
图2-7混合型模糊PID控制器
2)误差e模糊积分的PID模糊控制器
1988年由M.Basseville提出的又一种PID控制器,如图2-8所示。
它是一种对误差e的模糊值进行积分的PID控制器,这种对误差e的模糊值进行积分的PID模糊控制器可用来消除大的系统余差。
图2-8误差e模糊积分的PID模糊控制器
2.专家PID控制
专家控制的实质是基于受控对象和控制规律的各种知识,以智能的方式来利用这些知识,求得受控系统尽可能地优化和实用化,它反映出智能控制的许多重要特征和功能。
随着微机技术和人工智能技术的发展,出现了多种形式的专家控制器。
人们自然地也想到用专家经验来建立PID参数。
专家PID控制系统原理框图如图2-9所示。
图2-9专家PID控制系统原理框图
3.智能PID自学习控制
一个系统若能通过在线实时学习,自动获得知识,并能将所学的知识用来不断改善一个具有未知特征过程的控制性能,则将这种系统称为自学习控制系统。
智能PID自学习控制系统的结构如图2-10所示。
该系统的特点是在智能PID控制即规则PID控制的基础上,重视和强调对该控制器的控制性能的评价,将这个评价结果反馈给PID参数的自学习机构,从而使系统在运行过程中能自动地对各PID的参数进行自学习和自整定。
同时,若系统中出现扰动源或受控对象参数发生变化,系统的PID参数也能自动地修改和适应。
图2-10智能PID自学习控制系统结构框图
4.基于神经网络的PID控制
以非线性大规模并行处理为主要特征的神经网络,是以生物神经网络为模拟基础,试图模拟人的形象思维,以及学习和获取知识的能力。
它具有学习、记忆、联想、容错、并行处理等种种能力,已在控制领域中得到广泛的应用。
由单个神经元构成的PID控制系统,控制器输出可写成:
(2-14)
权系数Wi(i=1,2,3)可以通过神经元的自学习功能来进行自适应调整,故可大大提高控制器的鲁莽性能。
与常规PID控制器比较,无须进行系统建模,对具有不确定性因素的系统,其控制品质明显优于常规PID控制器。
基于神经网络的PID控制系统结构如图2-11所示。
图2-11基于神经网络的PID控制系统框图
近年来,国内外对智能PID控制的应用研究十分活跃并出现热潮,由于不需要确切知道系统的精确数学模型,具有很强的鲁莽性,所以智能PID控制具有广泛的应用前景。
与应用研究相比,很多理论问题,诸如智能控制系统的稳定性和鲁莽性的研究还有待进一步的深入。
(注:
可编辑下载,若有不当之处,请指正,谢谢!
 升级会员
升级会员 