两轮自平衡小车控制研究_精品文档资料下载.pdf
《两轮自平衡小车控制研究_精品文档资料下载.pdf》由会员分享,可在线阅读,更多相关《两轮自平衡小车控制研究_精品文档资料下载.pdf(4页珍藏版)》请在冰豆网上搜索。
A文章编号:
1003-7241(2011)04-0010-04ResearchofTraceControlforTwo-WheelSelf-BalancedVehicleBasedonFNNZHANGWei-min,DUANXiao-ming,ZHAOYan-hua(AutomationDepartment,LuoyangInstituteofScienceandTechnology,Luoyang471023China)Abstract:
Two-wheelself-balancedvehicleisanimportantresearchfieldofmobilerobot.Totheproblemofpositioncontrol,abasedLQRcontrolcombinedneuralnetworksisproposedinthispaper.Thesimulationresultandrealsystemresultofpositioncontrolshowthatourschemehasbetterperformance.Keywords:
self-balanced;
tracecontrol;
LQR1引言目前对于固定的机械臂的研究较为成熟,而对于具有移动平台的智能移动机器人41的研究却甚少,两轮自平衡小车32是移动机器人研究中的一个重要领域。
两轮自平衡机器人两轮共轴、独立驱动、车身中心位于车轮轴上方,通过运动保持平衡,可直立行走。
由于特殊的结构,其适应地形变化能力强,运动灵活,可以胜任一些复杂环境里的工作。
另一方面,从研究意义上看,自平衡小车系统是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合复杂非线性系统。
本文针对该系统的基本平衡控制问题,采用了最优控制方案,仿真实验结合实际系统实验均实现了其对平衡控制,验证了控制效果。
2自平衡小车数学模型两轮自平衡小车平衡控制的基本思想是:
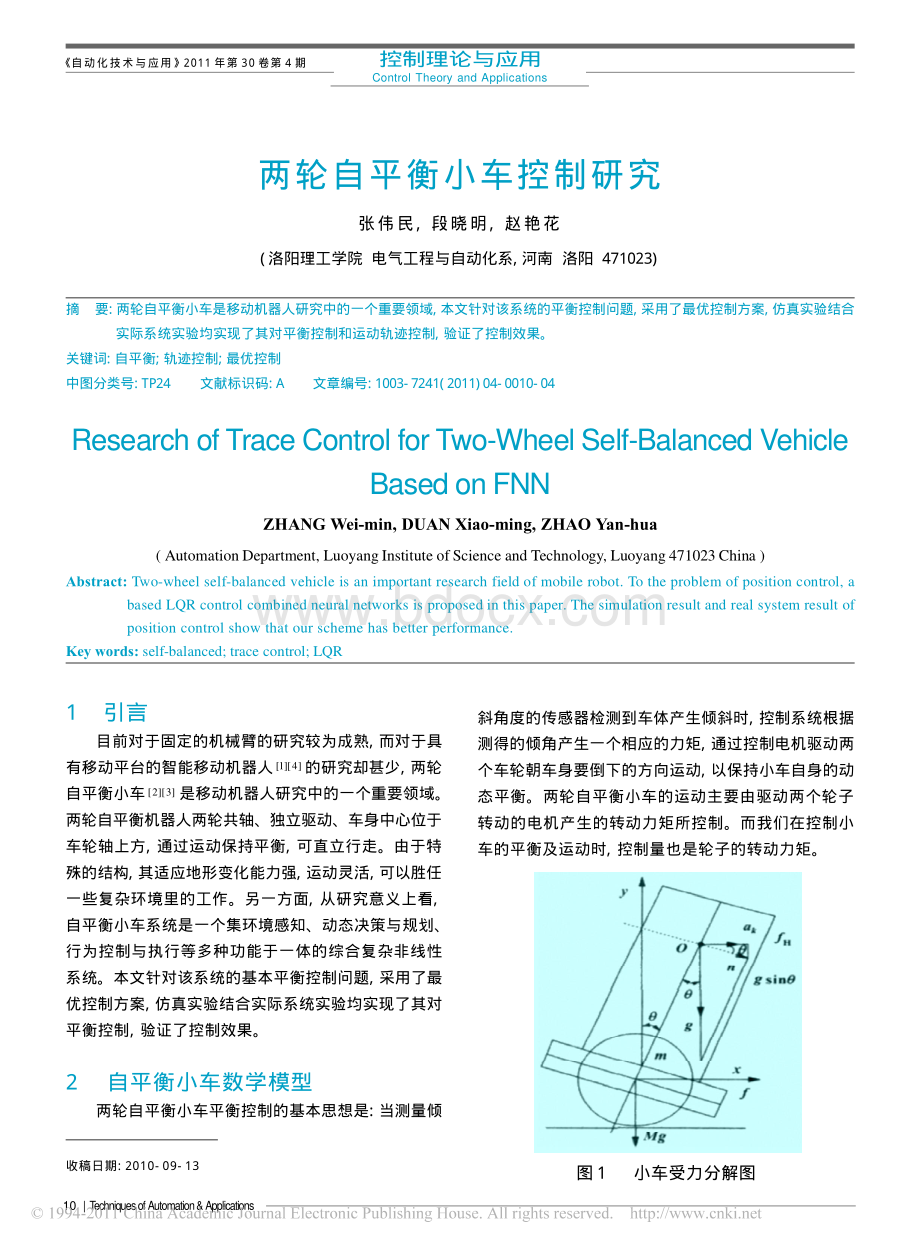
当测量倾控制理论与应用ControlTheoryandApplications斜角度的传感器检测到车体产生倾斜时,控制系统根据测得的倾角产生一个相应的力矩,通过控制电机驱动两个车轮朝车身要倒下的方向运动,以保持小车自身的动态平衡。
两轮自平衡小车的运动主要由驱动两个轮子转动的电机产生的转动力矩所控制。
而我们在控制小车的平衡及运动时,控制量也是轮子的转动力矩。
收稿日期:
2010-09-13图1小车受力分解图自动化技术与应用2011年第30卷第4期TechniquesofAutomation&
Applications|11小车受力分解图如图1所示。
其中规定质心为O,水平方向为x,垂直方向为Y。
小车支架中心轴线规定为轴m,与其垂直方向的轴线规定为n,0为小车的偏角。
小车本质不稳定,车体倾斜的原因源于重力在水平方向的分量。
为了保持平衡,小车方向的驱动力,必须等于或大于重力沿着水平方向轴的分力Hf2。
两轮自平衡小车的控制输入量是小车底部的直流伺服电机的电枢电压,被控制量是小车上车架的偏角t(),系统的构成示意图上所示驱动电机的电枢电压和电流分)()和(tita,则电机的动态方程为:
)()()()()()(RtiKttvtKtdtdiaLtiaTEaaaa=+
(1)其中:
aR和aL分别为电枢电阻和电枢电感;
EK为反向电势系数,TK为力矩系数,一般可取EK=)(tKE,表电机的转子的角速度;
)(t为电机的输出力矩。
电机转角与小车的位置关系,电机转子的角位移为()t,齿轮比gK,则小车的驱动轮)(tc可表示为)(tc=()gtK
(2)电机驱动轮半径为r,小车的位移为)(tx,那么有:
()()()()cgggrxtrttKdxrdrtdtKdtK=(3)小车的质量为)(,tfM为电机提供给x方向的驱动力,则小车的运动方程为:
)()()(22tftfdttxdMF=(4)其中:
)(tfF表示上车架的水平运动对下车体的作用力,其方向与驱动力)(tf的方向相反,而驱动力)(tf与电机输出力矩的关系为:
)()(trKtfg=(5)上支架的运动由水平方向和垂直方向构成,质心距小车下平台的距离为L,支架的质量为m,上支架的偏移角为()t,质心沿各个运动方向的位移分别为:
水平方向:
()sin()xtLt+,单位为m,垂直方向:
cos()Lt,单位为m。
各个方向的运动方程可以表示成:
2222()sin()()cos()()HvdmxtLtftdtdmLtftmgdt+=(6)其中:
)(tfH和)(tfv表示作用在下小车支架上沿着水平方向和垂直方向的反作用力,单位为N。
要小车实现动态平衡,只要水平方向的推力)()(.tftfHF=,将式(6)代入式(4),得到小车的运动方程为:
22222()()(M)(cos()()()sin()()dxtdtmmLtdtdtdtftmLtdt+=+(7)式(7)的平衡条件,也就是说在小车系统中电机水平驱动力,)(tf需要大于或等于小车重力水平分量,即满足式(8)。
22222()()()(M)(cos()sin()()()dxtdtdtmmLtmLtftdtdtdt+(8)也可将将两个车轮的转动力矩作为系统的输入量u。
建立两轮自平衡小车的系统模型,其中m=0.42kg,M=21kg,L=0.3m,建立的两轮自平衡小车的系统方程式如下:
()=+=xxyuxxxx01009972.5409966.22008691.18300100000734.67000010(9)x为车轮的水平位移,为车体偏离垂直方向的角度(规定:
坐标Y轴到Z轴的夹角,逆时针为正)。
3控制策略线性二次性调节器问题在现代控制理论中占有非常重要的地位,受到控制学界的普遍重视,它在倒立摆控制系统的设计中得到广泛的应用。
使用这种方法的关键在于选择加权阵Q和R,设计出一个线性二次型最优控制器。
二次型性能泛函的一般形式如下:
)()(21)()()(00)()()(210ffTTtttNxtxdttutxtRtQtutxJf+=(10)其中,x是系统的状态变量,u是施加给系统的控制力矩,ftt,0是起始时间和终止时间,)()()(txtQtxT是运动约束的二次型,其中)(tQ是半正定的运动约束权值矩阵,)()()(tutRtuT是控制输入约束的二次型,其中)(tR是正定的控制约束权值矩阵,)()()(txtNtxfT为状态终止约束的二次型,N是半正定的终止约束权控制理论与应用ControlTheoryandApplications自动化技术与应用2011年第30卷第4期12|TechniquesofAutomation&
Applications值矩阵。
在最优控制器的设计中,一般是通过改变权值矩阵Q和R,使二次型目标函数J取最小值。
为了使J最小,主要是依据庞德里亚金的极值原理。
通过对性能指标优化寻找可以使目标函数极小的控制器。
4仿真研究4.1线性仿真在线性仿真中,小车系统的初始状态00049.0.=xxPP,取启动力矩25,250u,控制力矩4.2,4.2u,此时,控制器输出已经达到了极限2.4,而系统各状态角度、角速度、位置和速度的零输入响应曲线,如图2所示。
通过多次仿真研究发现自平衡小车的倾角可控范围为49.0,49.0p。
4.2非线性仿真应用最优控制器,进行非线性仿真,同样取启动力矩25,250u,控制力矩为4.2,4.2u。
在Simulink环境下,当小车系统的取初始状态为0004.0.=xxPP时,控制器输出达到极限力矩2.4,系统的各状态角度、角速度、位置和速度响应曲线如图3所示。
通过多次仿真研究,可以发现基于二次型最优的线性状态反馈控制器的对两轮自平衡小车系统的非线性模型控制,最大可控角范围可以达到.4.0,4.0prad。
4.3仿真对比从上面的仿真中,可以发现最优控制器在动态响应速度与控制器输出之间进行了优化。
不管从启动力矩控制理论与应用ControlTheoryandApplications图2二次型最优状态反馈线性仿真状态响应图图3二次型最优状态反馈非线性仿真状态响应图0u还是运动过程中的连续转动力矩u都达到了最大程度的利用,在角速度,速度都没有限制的条件下,仅控制器输出受限的情况下,两轮自平衡小车的最大可控角理论上可以达到4.0,4.0prad。
5实时控制及结论基于固高公司的自平衡小车,利用本文的控制方法,使自平衡小车在小范围振动内保持平衡,控制效果如图4所示,其中底盘振动幅度约为3104米,主干振动幅度约为0.05rad。
通过仿真实验和实时控制实验,可以看出采用最优控制方法,很好地完成了平衡任务,并且达到了良好的控制效果。
参考文献:
图4自平衡小车实时控制曲线自动化技术与应用2011年第30卷第4期TechniquesofAutomation&
Applications|13控制理论与应用ControlTheoryandApplications1SATOKOFURUKT,SHINICHIYUTA.PoseEs-timationofavehicleonroughterrainbyusingtheSunDirection,IEEEconferenceonMuHisensorFusionandInteC,grationforIntelligentsystems,2003.2郑钧元两轮自平衡机器人之平衡控制D台湾:
台湾国立中央大学,2003.3赵勇.两轮不稳定机器人载体运动学及动力学变结构控制研究D.陕西:
西安电子科技大学,2007.4冯飞,张洛平,张波.四自由度机器人Matlab仿真例J,河南科技大学学报(自然科学版),2008,6
(2):
45-49.5李国栋.基于图像雅可比矩阵的关节机器人视觉伺服控制系统研究D.湖南:
湘潭大学,2007.作者简介:
张伟民(1978-),男,助教,研究方向:
自动控制、嵌入式系统。
图4最优调度结果Gantt图作者简介:
刘胜辉(1961-),男,教授,博士,研究方向:
智能优化理论与方法、生产调度系统建模与优化、遗传算法。
(上接第4页)法的仿真,得到两种算法的目标函数最佳优化数值的比较。
如表3所示:
本文所讨论的不确定作业调度问题的最优调度结果的Gantt图,如图4所示:
6结束语不确定的作业调度问题是一类复杂的NP难问题。
本文作者研究了具有不确定加工时间并带有交货期窗口的作业车间调度问题,在编码阶段采用基于机器的编码,使得解码阶段和每一代经遗传算子处理过的种群引入冲突消解机制,提高了初始种群和每一代种群中染色体的质量,
 升级会员
升级会员 