星玛电梯DSS规格表Word文档格式.docx
《星玛电梯DSS规格表Word文档格式.docx》由会员分享,可在线阅读,更多相关《星玛电梯DSS规格表Word文档格式.docx(95页珍藏版)》请在冰豆网上搜索。
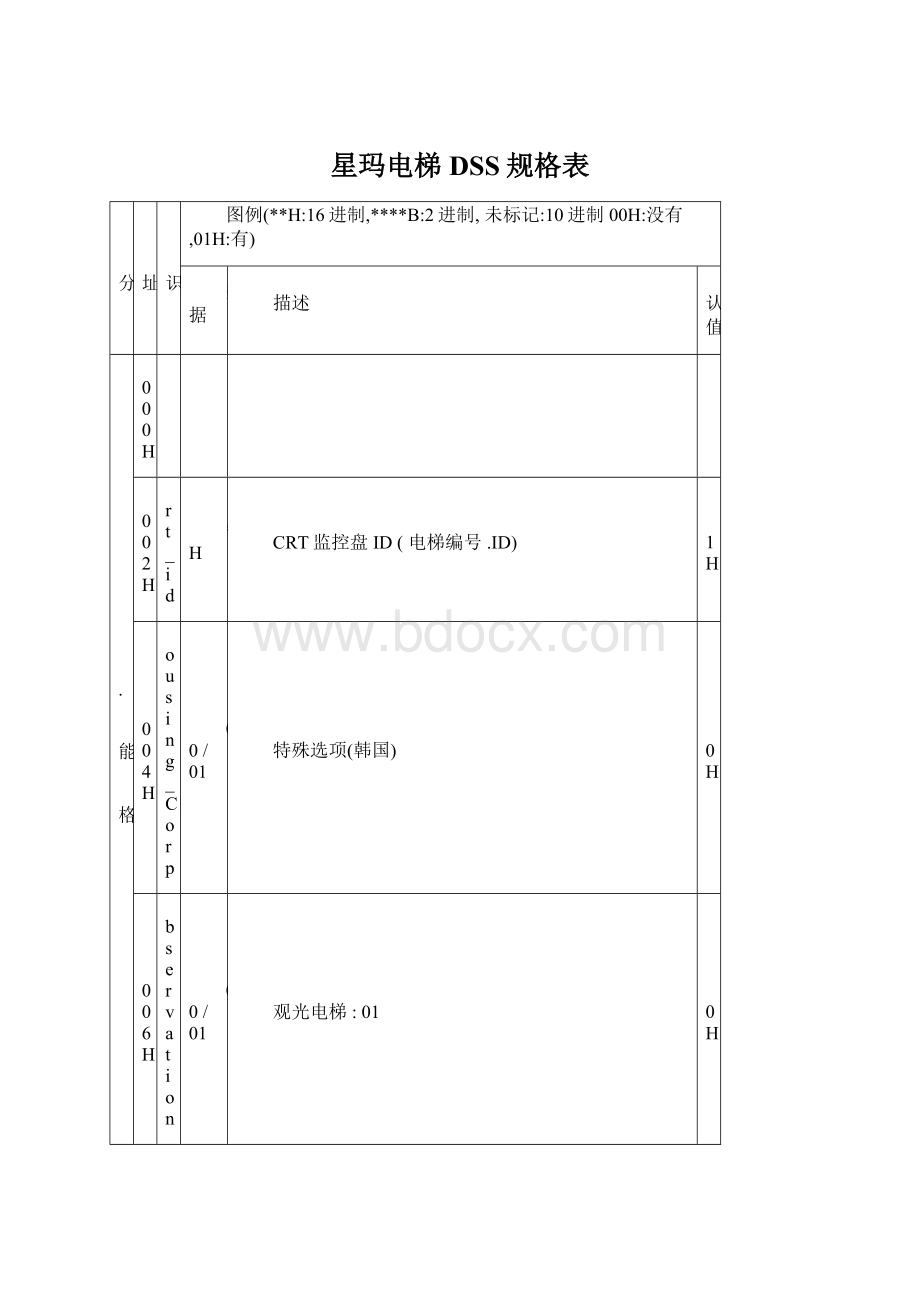
0012H
Earthquake
地震操作运行
0014H
Voice_to_RS232
0016H
Rope_Compen
绳伸长补偿功能.:
01
0018H
WeightSensor
负载传感器类型+传感器数量
PTM:
40H,称重开关装置:
00H
例)安装2个PTM:
42H
安装1个PTM:
41H
41H
001AH
ESMI_ID
*H
远程监控功能电梯ID设置
001CH
ESMI_Operation
远程监控功能
001EH
ALP_Operation
0020H
CRT_Operation
提供监控盘时:
0022H
Running_Open
有提前开门功能时:
0024H
Mis_Call_Cancel
自动防捣乱功能
(控制规格:
015A设置)
0026H
Call_Cancel
内选取消功能
(00:
无功能.,01:
按一次,02:
按两次,04:
长按一次)
0028H
Hall_Chime_Gong
厅到站钟使用时:
002AH
Hall_Call_Cancel
外呼取消功能
(00:
没有功能.,01:
按两次)
002CH
Fireman_Drive
消防运行功能:
002EH
Fireman_Open_Cut
当消防运行到达时关门待机.(当按开门按钮门打开时:
01H)
0030H
Call_Cancel_Non_Stop_SW
不停层开关动作时内选取消功能.
0032H
Auto_Private_Power
备用电源操作:
0034H
Voice_Guide_Spec1
相应位设置1
1bit:
下行
0bit:
上行
FFH
3bit:
离开电梯
2bit:
关门
5bit:
超载
4bit:
满员(80%)
7bit:
贵宾
6bit:
服务楼层
0036H
Voice_Guide_Spec2
相应位设置1
停电
火灾检测出
故障
自动救援运行
自发电运行
驻停
地震
0038H
Chime_RTC_Spec
00/01
夜间到站钟禁止功能(当使用该功能时:
<
DCV-PCB>
音量,到站钟输出)
(在规格中设置时间控制)
003AH
Ref_FL_RTC_Spec
根据流量变更1st和2nd基准层功能
003CH
Force_Stop_Operation
强迫停止功能(01H)
(在规格中设置强迫停止楼层)
003EH
OBS_Operation
OBS开关功能:
0040H
Heavy_Wind_Oper
0042H
Russia_Code
0044H
Rope_Gripper
0046H
Load_Auto_Adjust
载重量自动补偿功能(01H)
004EH
Dir_Reverse
轿箱呼梯登记的运行方向优先功能切断
0050H
Photo_Shoe
使用光电开关(01H)
0054H
Hall_Lantern
有到站灯(01H)
0056H
Voice_Output_Time
到达时语音播放时间(单位:
秒)
*可用等级(2~5秒)
02H
0058H
Chime_Output_Time
到站钟到达动作时间(单位:
*如果使用语音保障功能时4秒,
如果不提供时2秒
04H
005AH
Multi_Step_Decel
005CH
Housing_Corp_Fire_
Option
特殊火灾运行(韩国)
0060H
Chime_Removal_Time
23时可以被记录为23H
(例)
在
23:
30~06:
30时间内禁止发声
0060H:
23H
0062H:
30H
0064H:
06H
0066H:
(地址:
时间)
到站钟/铃禁止开始时间(小时)
22H
0062H
到站钟/铃禁止开始时间(分钟)
0064H
到站钟/铃禁止结束时间(小时)
06H
0066H
到站钟/铃禁止技术时间(分钟)
0068H
Ref1_Select_Time
同上
使用第1基准层的开始时间(小时)
18H
006AH
使用第1基准层的开始时间(分钟)
006CH
使用第1基准层的结束时间(小时)
19H
006EH
使用第1基准层的结束时间(分钟)
0070H
Ref2_Select_Time
使用第2基准层的开始时间(小时)
07H
0072H
使用第2基准层的开始时间(分钟)
0074H
使用第2基准层的结束时间(小时)
08H
0076H
使用第2基准层的结束时间(分钟)
2.
CONT-ROLSPEC
0100H
Capacity
*H
*(16=17人)
容量号码
人乘
6
8
9
10
11
编号
09H
0AH
0BH
13
15
17
20
24
0DH
0FH
11H
14H
0102H
Motor
电动机号码
kW
4.1
6.5
6.4
10.3
40H
42H
43H
0104H
Contract_Velocity
额定速度代码
速度
30
45
60
代码
03H
75
90
105
05H
0106H
TM_Gear
曳引机代码
无齿轮型:
0108H
Traction_Machine_code
无齿类型
010AH
IGBT
*H
IGBT容量(A)
50
100
150
200
010CH
CT_Turn
4圈
010EH
Encoder
编码器计数
72
512
1024
3600
0110H
Roping
绕绳比代码
1:
1
2:
4:
0112H
Maint_Velocity
检修及层高测量操作速度代码
15m/min01H
0114H
Brake_C_Cntl
抱闸电流控制功能
0116H
Brake_Current
0118H
011AH
Second_Ref_V
011CH
High_FHM-V
011EH
Two_Speed_Err_Run
0120H
Acceleration
加速度
0122H
Jerk
0124H
PMSM_ENC_DIR
主编码器方向设置
0126H
Motor_Thermal
0X01:
紧急停止02:
在服务层停止(电机温度过高检测时)
0128H
SlackRopeSwitch
紧急停止,0X02:
在服务层停止(涨绳轮开关动作时)
012AH
C1SW
0142H-0144H
Compen_Rope_Adjust
平衡链/及随行电缆补偿.
(适用压力传感器型)
0146H-0148H
No_Load_Point
空载点设置
-现场设置
014AH-014CH
Full_Load_Point
满载点设置
014EH–0150H
Half_Load_Point
半载点设置
0152H
Inv_Noload_Cur
空载电流补偿数据
0154H
Inv_Slip_C
电动机2次恒定补偿数据
0156H
0158H
Full_Load_Detect_
Percent
载重量直驶点
50H
 升级会员
升级会员 