第三章平面机构的运动分析2优质PPT.ppt
《第三章平面机构的运动分析2优质PPT.ppt》由会员分享,可在线阅读,更多相关《第三章平面机构的运动分析2优质PPT.ppt(15页珍藏版)》请在冰豆网上搜索。
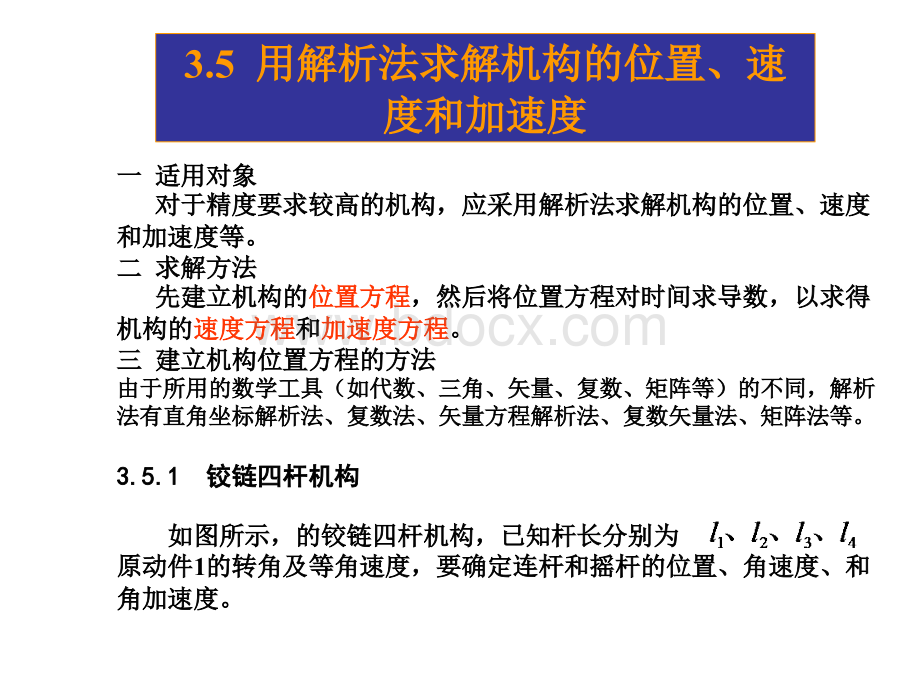
33.5.5.1.1铰链四杆机构铰链四杆机构如图所示,的铰链四杆机构,已知杆长分别为如图所示,的铰链四杆机构,已知杆长分别为原动件原动件1的转角及等角速度,要确定连杆和摇杆的位置、角速度、和的转角及等角速度,要确定连杆和摇杆的位置、角速度、和角加速度。
角加速度。
3.5用解析法求解机构的位置、速用解析法求解机构的位置、速度和加速度度和加速度建立封闭向量多边形如图所示,则:
建立封闭向量多边形如图所示,则:
以复数形式可表示为:
按欧拉公式展开得:
由实部和虚部分别相等可动:
1求机构位置求机构位置消去消去2可得可得:
说明:
(1)上式中,根号前的符号可以根据机构实际的装配方案,或)上式中,根号前的符号可以根据机构实际的装配方案,或从动件运动的连续性来确定。
从动件运动的连续性来确定。
“”号适用于图中实线所表示的号适用于图中实线所表示的装配方案装配方案ABCD。
“”号适用于图中虚线所表示的装配方号适用于图中虚线所表示的装配方案案ABCD。
(2)若根号内的数值若根号内的数值0,表示机构相应的位置,表示机构相应的位置无法实现。
无法实现。
(2)求)求2由(由(b)式得:
式得:
2求构件的角速度求构件的角速度对式(对式(f)式)式求导得:
求导得:
将将乘上式的两端得:
乘上式的两端得:
取虚部得:
同理,将同理,将乘上式的两端得:
取实部得:
关于角速度的符号:
“”该构件的转动方向与图示方向相同;
该构件的转动方向与图示方向相同;
“”该构件的转动方向与图示方向相反该构件的转动方向与图示方向相反。
3求构件的角加速度求构件的角加速度对(对(i)式)式将将乘上式的两端并展开得:
乘上式的两端并展开得:
对(对(i)式两端)式两端乘乘得得:
关于角加速度的符号:
若若i与与i同向同向,则该构件作加速运动;
则该构件作加速运动;
若若i与与i反向反向,则该构件作减速运动。
则该构件作减速运动。
2.52.5.2.2曲柄滑块机构曲柄滑块机构如图所示的曲柄滑块机构,已知偏心距e、曲柄1的长度l1、转角1、等角速度1,连杆2的长度l2,原动件1的转角及等角速度,要确定连杆转角2、角速度2、角加速度2,及滑块的位置xC、速度vC和加速度aC.。
(1)求位置该机构的向量方程为:
分别取实部和虚部得:
即图3-10对式(e)求导得:
乘以得:
对式(f)取虚部得:
(2)求速度图3-10对式(f)求导:
乘以并取实部得:
对式(g)取虚部得:
(3)求加速度图3-10xC和aC可按级数展开进行近似计算见件教材。
如图所示的导杆机构,已知曲柄1的长度l1、转角1、等角速度1,中心距l4,原动件1的转角及等角速度1,要确定导杆3的转角3、角速度3、角加速度3,及滑块在导杆上的位置S、滑动速度vB2B3及加速度aB2B3.。
(1)求位置如图211所示,建立向量方程2.52.5.1.1导杆机构导杆机构图3-11分别取实部和虚部得:
故:
(2)求速度将式(h)对时间求导得:
图3-11将(i)式对时间求导,得:
两边同乘以分别取实部和虚部得:
2.5运动线图运动线图从动件的位移S()速度V()、加速度a()随原动件的位移(时间)的变化规律。
 升级会员
升级会员 