基于simulink的模糊控制仿真Word格式.doc
《基于simulink的模糊控制仿真Word格式.doc》由会员分享,可在线阅读,更多相关《基于simulink的模糊控制仿真Word格式.doc(5页珍藏版)》请在冰豆网上搜索。
假设系统给定为阶跃值r=30,系统初始值r0=0.试分别设计
(1)常规的PID控制器;
(2)常规的模糊控制器;
(3)比较两种控制器的效果;
(4)当通过改变模糊控制器的比例因子时,系统响应有什么变化?
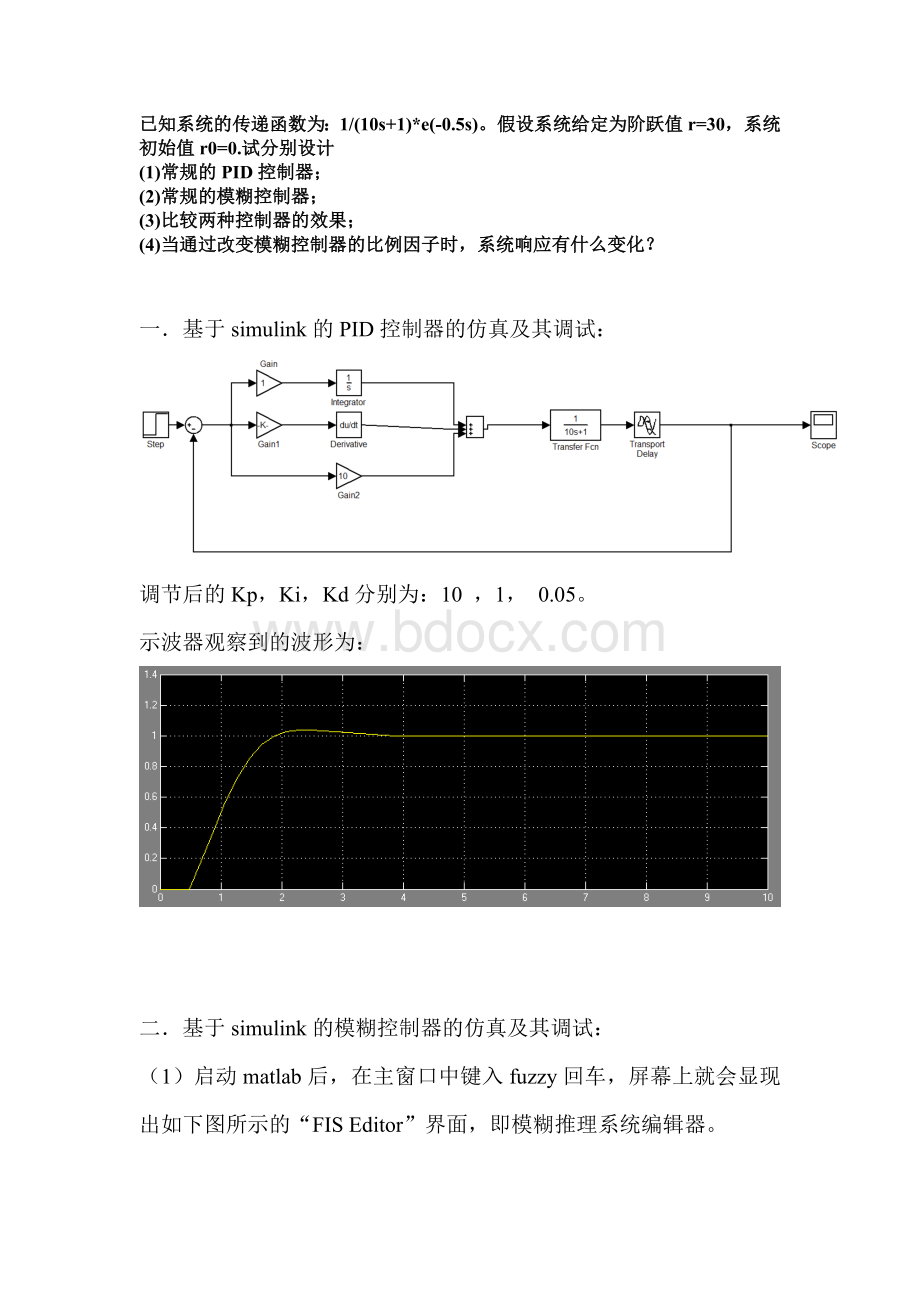
一.基于simulink的PID控制器的仿真及其调试:
调节后的Kp,Ki,Kd分别为:
10,1,0.05。
示波器观察到的波形为:
二.基于simulink的模糊控制器的仿真及其调试:
(1)启动matlab后,在主窗口中键入fuzzy回车,屏幕上就会显现出如下图所示的“FISEditor”界面,即模糊推理系统编辑器。
(2)双击输入量或输出量模框中的任何一个,都会弹出隶属函数编辑器,简称MF编辑器。
(3)在FISEditor界面顺序单击菜单Editor—Rules出现模糊规则编辑器。
本次设计采用双输入(偏差E和偏差变化量EC)单输出(U)模糊控制器,E的论域是[-6,6],EC的论域是[-6,6],U的论域是[-6,6]。
它们的状态分别是负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。
语言值的隶属函数选择三角形的隶属度函数。
推理规则选用Mamdani控制规则。
该控制器的控制规则表如图所示:
Simulink仿真图如下:
在调试过程中发现加入积分调节器有助于消除静差,通过试凑法得出量化因子,比例因子以及积分常数。
Ke,Kec,Ku,Ki分别是:
3,2.5,3.5,0.27
三.实验心得:
通过比较PID控制器和模糊控制器,我们可知两个系统观察到的波形并没有太大的区别。
相对而言,对于给出精确数学模型的控制对象,PID控制器显得更具有优势,其一是操作简单,其二是调节三个参数可以达到满意的效果;
对于给出给出精确数学模型的控制对象,模糊控制器并没有展现出太大的优势,其一是操作繁琐,其二是模糊控制器调节参数的难度并不亚于PID控制器。
在实验中增大模糊控制器的比例因子Ku会加快系统的响应速度,但Ku过大将会导致系统输出上升速率过快,从而使系统产生较大的超调量乃至发生振荡;
Ku过小,系统输出上升速率变小,将导致系统稳态精度变差。
 升级会员
升级会员 