双闭环直流调速系统仿真1Word文件下载.doc
《双闭环直流调速系统仿真1Word文件下载.doc》由会员分享,可在线阅读,更多相关《双闭环直流调速系统仿真1Word文件下载.doc(13页珍藏版)》请在冰豆网上搜索。
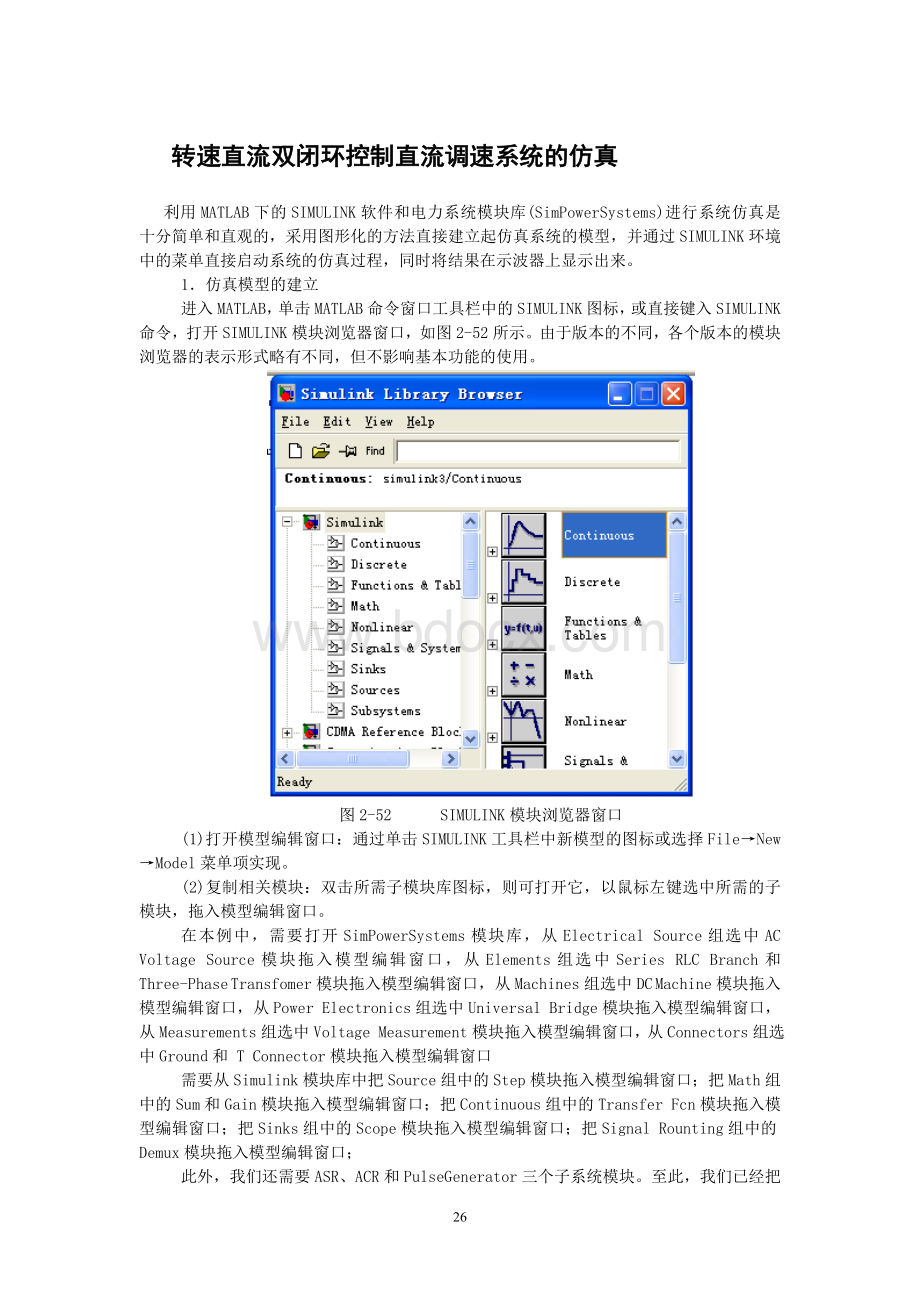
在本例中,需要打开SimPowerSystems模块库,从ElectricalSource组选中ACVoltageSource模块拖入模型编辑窗口,从Elements组选中SeriesRLCBranch和Three-PhaseTransfomer模块拖入模型编辑窗口,从Machines组选中DCMachine模块拖入模型编辑窗口,从PowerElectronics组选中UniversalBridge模块拖入模型编辑窗口,从Measurements组选中VoltageMeasurement模块拖入模型编辑窗口,从Connectors组选中Ground和TConnector模块拖入模型编辑窗口
需要从Simulink模块库中把Source组中的Step模块拖入模型编辑窗口;
把Math组中的Sum和Gain模块拖入模型编辑窗口;
把Continuous组中的TransferFcn模块拖入模型编辑窗口;
把Sinks组中的Scope模块拖入模型编辑窗口;
把SignalRounting组中的Demux模块拖入模型编辑窗口;
此外,我们还需要ASR、ACR和PulseGenerator三个子系统模块。
至此,我们已经把转速电流双闭环直流调速系统的仿真结构框图所需的模块都已拖入模型编辑窗口。
(3)修改模块参数:
双击模块图案,则出现关于该图案的对话框,通过修改对话框内容来设定模块的参数。
在本例中,双击加法器模块Sum,打开如图2-54所示的对话框,在ListofSigns栏目描述加法器三路输入的符号,其中|表示该路没有信号,所以用|+-取代原来的符号,得到动态结构框图中所需的减法器模块了。
图2-54 加法器模块对话框
双击传递函数模块(TransferFcn),则将打开如图2-55所示的对话框,只需在其分子Numerator和分母Denominator栏目分别填写系统的分子多项式和分母多项式系数,例如0.002s+1是用向量[0.0021]来表示的。
在这里我们用它可以构建转速、电流反馈滤波器和给定滤波器。
图2-55 传递函数模块对话框
双击阶跃输入模块(Step)可以把阶跃时刻(Steptime)参数从默认的1改到0,把阶跃值(Finalvalue)从默认的1改到10。
图2-56 阶跃输入模块对话框
双击交流电压源(ACVoltageSource)得到下图2-57,修改峰值(Peakamplitude)默认的参数100为200*sqrt
(2),修改频率(Frequency)默认参数为50。
为了形成三相交流电源,三个ACVoltageSource的Phase项依次填入0、-120、-240,分别对应uA、uB、uC。
(标注uA、uB、uC,可以通过单击ACVoltageSource进行修改。
)
图2-57 交流电压源模块对话框
双击直流电压源模块(DCVoltageSource)得到下图2-58,修改Amplitude即改变了电压源的幅值。
这里此模块用作直流电动机的励磁电源,幅值为220V。
图2-58 直流电压源模块对话框
三相桥式可控整流电路模块(6-pulsethyristorbridge)的A、B、C三个输入端连接三相电源或三相变压器的二次侧;
它的两个输出端K和A,则输出整流后的直流电压,其中K端为“+”,A端为“-”。
模型的脉冲输入端pulse用于接入晶闸管的触发信号。
双击模块弹出对话框图2-60。
四个参数分别是导通电阻(Thyristoron-stateresitance)、导通电感(Thyristoron-stateinductance)、缓冲电阻(Snubberresistance)、缓冲电容(Snubbercapacitance)。
图2-60 三相可控整流电路模块对话框
直流电机模块(DCMachine),F+和F-是直流电机励磁绕组的连接端,A+和A-是电机电枢绕组的联结端,TL是电机负载转矩的输入端。
m端用于输出电机的内部变量和状态,在该端可以输出电机转速、电枢电流、励磁电流和电磁转矩四项参数。
双击模块打开对话框图2-61。
修改参数电枢电阻和电感(Armatureresistanceandinductance)为[0.21 0.0021],励磁电阻和电感(Fieldresistanceandinductance)为[146.7 0],励磁和电枢互感(Field-armaturemutualinductance)为0.84,转动惯量(Totalinertia)为0.572,粘滞摩擦系数(Viscousfrictioncoefficient)为0.01,库仑摩擦转矩(Coulombfrictiontorque)为1.9,初始角速度(initialspeed)为0.1。
图2-61 直流电机模块对话框
双击Gain可修改增益。
图2-62 增益模块对话框
双击SeriesRLCBranch,可依次修改电阻、电感和电容。
图2-63 RLC串联电路模块对话框
双击示波器出现图2-64,点击,即可打开图2-65(a)所示对话框。
改变Numberofaxes就可改变接入信号的个数。
还可以右击选择Axesproporties得到图2-65(b),通过修改Title来设置所显示参量的名字。
图2-64 示波器模块对话框
图2-65(a) 示波器参数修改对话框
图2-65(b) 示波器坐标轴参数修改对话框
双击信号分解模块(Demux),通过修改(Numberofoutputs)可以改变输出信号的个数。
图2-66 分解模块对话框
ASR、ACR其实是由放大器、积分器、加法器、限幅器组成的两个结构完全一样的控制环节。
它们用了来自Math组的Gain模块来仿真比例器,用Continuous组的Integrator模块和Gain模块的串接来仿真积分器,两者通过加法器模块Sum构成了PI调节器。
经过子系统封装后构成一个模块。
我们可以通过Edit菜单选项LookunderMask查看其内部结构。
!
1!
图2-67 ASR、ACR模块
双击ASR或ACR模块填写PI调节器所需要的放大系数、微分时间常数和上、下输出(积分)限幅值,本例的输出(积分)饱和值10和-10。
其原因是转速调节器是工作在限幅饱和状态,故要在仿真模型中真实地反映出来。
如下图2-68(a)所示:
如图2-68(a) ASR、ACR模块参数修改对话框
PulseGenerator的机构如下图2-68(b)所示,主要是一个同步6脉冲触发器,由子系统(如图2-68(c)所示)构成三相同步电压源,由Fcn将ACR输出转换成脉冲控制角α。
而输入端Block用于控制触发脉冲的输出,在该端置“0”,则有脉冲输出;
如果设置为“1”,则没有脉冲输出,整流器也不会工作。
完成了对模块参数的调整后就可以
电流环的仿真模型
2.电流闭环控制系统仿真
(1)仿真过程的启动:
单击启动仿真工具条的按钮或选择Simulation→Start菜单项,则可启动仿真过程,再双击示波器模块就可以显示仿真结果,如图2-71所示。
图2-71 直接仿真结果
(2)仿真参数的设置:
从图2-71显示的仿真结果来看,无法对阶跃给定响应的过渡过程有一个清晰的了解,需要对示波器显示格式作一个修改,对示波器的默认值逐一改动。
改动的方法有多种,其中一种方法是选中图2-70Simulink模型窗口的Simulation→Simulationparameters菜单项,打开如图5-72所示的对话框,对仿真控制参数进行设置。
图2-72 Simulink仿真控制参数对话框
其中的Starttime和Stoptime栏目分别允许填写仿真的起始时间和结束时间,把默认的结束时间从10.0秒修改为0.35秒。
再一次地启动仿真过程,然后启动Scope工具条中的第6个按钮自动刻度(Autoscale),它会把当前窗中信号的最大最小值为纵坐标的上下限,从而得到了图2-73所示的清晰图形。
图2-73 修改控制参数后的仿真结果
(3)调节器参数的调整:
利用MATLAB下的SIMULINK软件进行系统仿真是十分简单和直观的,在图2-70所示的电流环的仿真模型中,只要调整PI调节器的参数,可以很快地得到电流环的其它阶跃响应曲线。
例如:
以KT=0.25的关系式按典型Ⅰ型系统的设计方法得到了PI调节器的传递函数为,很快地得到了电流环的阶跃响应的仿真结果如图2-74所示,无超调,但上升时间长;
以KT=1.0的关系式得到了PI调节器的传递函数为,同样得到了电流环的阶跃响应的仿真结果如图2-75所示,超调大,但上升时间短。
图2-73~图2-75反映了PI调节器的参数对系统品质的影响趋势,在工程设计中,可以根据工艺的要求,直接修改PI调节器的参数,找到一个在超调量和动态响应快慢上都较满意的电流环调节器。
图2-74 无超调的仿真结果
图2-75 超调量较大的仿真结果
3.转速环的仿真设计
(1)建立转速环的仿真模型
按照前述的电流环的仿真模型的建立方法,得到转速环的仿真模型,如图2-76所示。
图2-76 转速环的仿真模型
(2)转速环仿真模型的运行
设置TL为启动负载;
TLStep为扰动负载,在运行1秒后加入;
得到下图2-77。
图2-77 双闭环的启动和抗扰波形图
MATLAB下的SIMULINK软件具有强大的功能,而且在不断地得到发展,随着它的版本的更新,各个版本的模块浏览器的表示形式略有不同,但本书所采用的都是基本仿真模块,可以在有关的组中找到,在进一步地学习和应用SIMULINK软件的其它模块后,会为工程设计带来便捷和精确。
在工程设计时,首先根据典型I型系统或典型Ⅱ型系统的方法计算调节器参数,然后利用MATLAB下的SIMULINK软件进行仿真,灵活修正调节器参数,直至得到满意的结果。
也可用MATLAB仿真软件包的设计工具箱设计其它各种控制规律的调节器,鉴于篇幅不一一展开。
38
 升级会员
升级会员 