无刷电动机和无位置传感器的电动机分解Word格式文档下载.docx
《无刷电动机和无位置传感器的电动机分解Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《无刷电动机和无位置传感器的电动机分解Word格式文档下载.docx(24页珍藏版)》请在冰豆网上搜索。
圈lJ.<
i
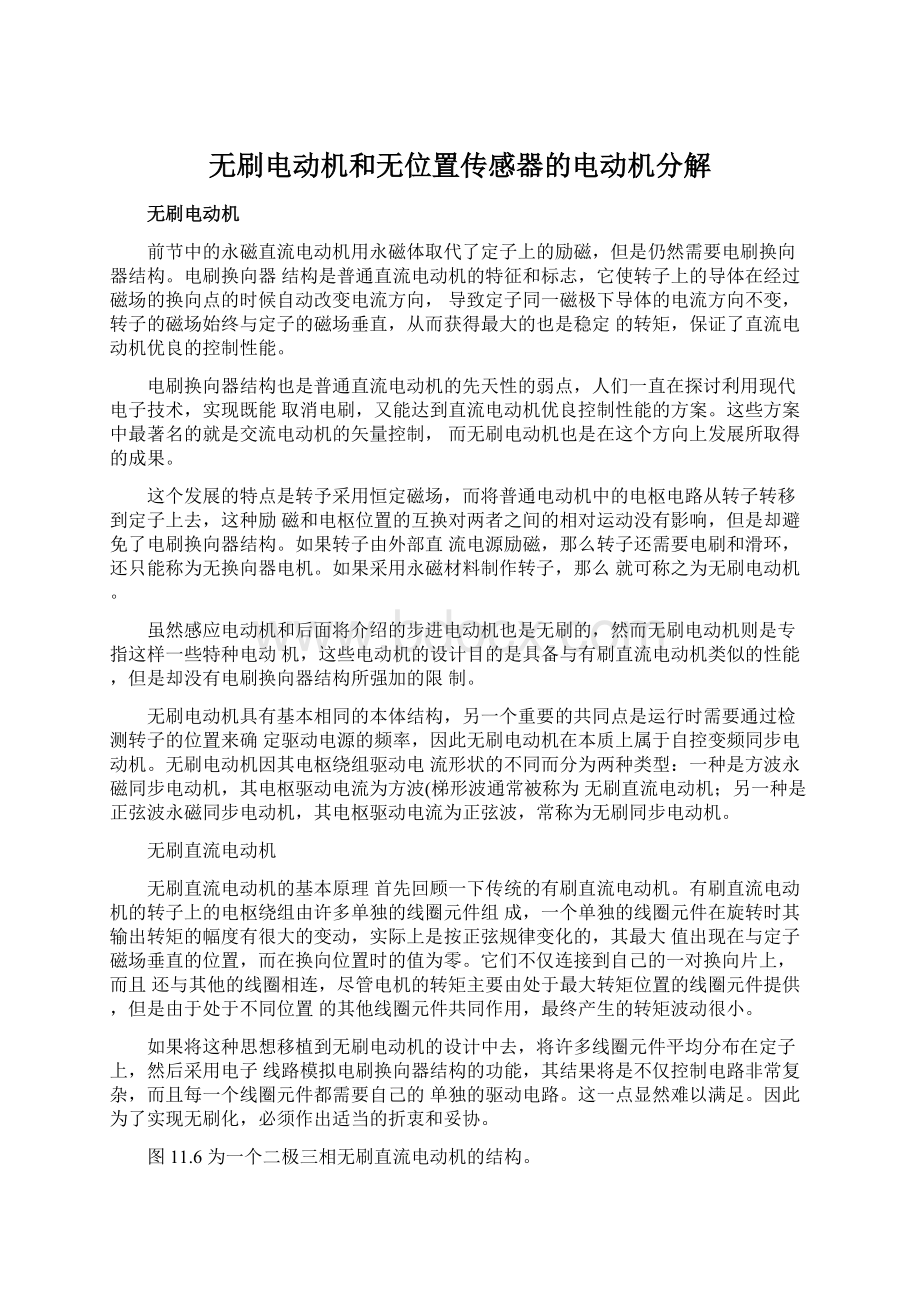
无刷直潦电动机结构
5组的线圈绕组,称之为相线圈或相绕组,图11.6中的三相二极无
Y接
无刷电动机具有少则2组、多至刷直流电动机的三个相绕组A1-A2、B1-B2和C1-C2分别绕在相对的两个磁极上。
三个绕组可按三线
法、四线丫接法和三线△接法连接。
图11.6为目前主要应用的三线丫接法。
在理想的状态下,定子和转子的两个磁场最好是保持互相垂直,这样才能产生与有刷直流电动机相近的性能。
但是无刷电动机定子相当于只有三个线圈和三个换向片的直流电动机电枢绕组,在定子的三相绕组由直流供电的条件下,这一点显然是做不到的。
无刷直流电动机中转子磁势与定子磁势之间的夹角称为转矩角。
定子磁场换相电路的设计思想是使转矩角的平均值是90°
。
以二极三相无刷直流电动机为例,在转子旋转一周的过程中,定子磁场按60°
的
增量步进6次,并且设计换相逻辑使转矩角在120。
〜60°
之间变化。
就是当定子磁场进入6个位置之一
的时刻,转子磁场与定子磁场的初始夹角为120°
,并受定子磁场的吸引朝着夹角减小的方向旋转,当夹
角达到60°
的时候,定子磁场又向前移动一个位置,使夹角再次增加为120°
在转子的一个60°
旋转过
程中,定子磁场保持不动。
因此在无刷电动机中,定子磁场的移动有两个特点:
一是这种移动是步进的而不是连续的;
二是这种步进的速度不像步进电动机取决于外部的脉冲频率,而是取决于电动机本身的转速,通过对转子位置和旋转方向的检测来实现定子绕组的换相。
所以这种电动机是自同步的,没有步进电动机和同步电动机的失步问题。
对于不同的绕组接法可采用不同的驱动电路拓扑,例如四线丫接法可采用三相半桥驱动,而三线丫和
三线△接法则需要采用三相全桥驱动(图11.7)。
下面以应用最广泛的三相全桥驱动的三线丫接法的无刷
直流电动机为基础进行讨论。
图11.7三相半桥驱动和全桥驱动5)三相半桥談动Mb)三和全桥弊动
A1、
,其换相一共有6个节拍,每这6个节拍的顺序、导通的晶所示。
如果在正向旋转状态下各的循环。
60度角(而2极的是错开120
三相桥式驱动电路在每个时刻,只有上半桥和下半桥中各一个晶体管导通,使外部直流电源接入B1和C1三个接线端中的两个,使得三个绕组中的两个串联接到电源上,而第三个绕组则没有通电。
与有刷直流电动机的换向对应的操作演变为无刷直流电动机绕组切换的“换相”个节拍代表三相绕组的一个状态,产生定子磁场旋转60度角。
如图所示。
体管和绕组的接入极性如表11.1所示。
前3拍的定子磁场位置如图11.8
拍的顺序是1-2-3-4-5-6-1的循环,那么在反转时的顺序是6-5-4-3-2-1-6
对于三相4极的无刷电机,每个相由两个绕组组成,相邻的相空间错开
度),旋转磁场的每步旋转30度,12步旋转一周,所以,磁场才转速慢了一半,如图所示。
无刷直流电动机的励磁由转子提供,而气隙磁场则是由转子磁场和定子的电枢反应共同形成。
气隙磁场的波形对电枢电流、电动势和电磁转矩的影响是不言而喻的。
以往的无刷直流电动机设计都是以正弦分布的气隙磁场为基础(图11.9(a))。
近年来随着材料的发展和设计方法的改进,新型无刷直流电动机的气隙磁场为具有足够宽度的梯形分布(图11.9(b)),这两种情况下的转矩特性是不同的。
表11.1换向顺序与极性
序号
•
导通晶体管
电源极性
V+
GND
1
T4
A】
2
T1.T.
A,
c,
3
"
叽
B,
4
T"
Al
5
6
A\
B
乙AtC
A.
Ci
卜
c
三相二植二相学笏码哲lb狈h硝塲建0
N
心
©
C,
a\
O/s
Ar
5.B-C
b
//
6、%/0
%丿少
O八%N
5,CtA6、gB
(易対蚣:
心削心
0/
C|
牛B"
\
GX
Q
p,
o
C
I23
AtbAMB-CBtACtASB
二核辭駆励6步談我礦杨
咼田
I人”
3sc
46%
K■谢粗钞証彷枫誕确旳图
V1
A■-
『为.4
fWz
An氏鼻
、A-■*L
(b)
ffl119气隙磁场的正弦和梯形分布
电磁转矩可以认为是定子的电枢磁势和转子磁势相互作用所产生的,如果不考虑磁路的饱和和磁势的
Fr为转子磁势。
高次谐波,电磁转矩表示为T=KFaFr,其中K为常数,Fa为定子磁势,
然而在气隙磁场不是均匀磁场的情况下,Fa取决于电枢电流ia,Fr取决于转矩角,这两者都不是常
数。
无刷直流电动机的电枢绕组具有电阻,在切割气隙磁场时会产生反电动势,这些和普通的直流电动机类似。
对于三相桥式驱动的三线丫接法,电枢中同时导电的两相绕组形成当时的电枢回路。
如果气隙磁场
为正弦分布,则回路中的总反电动势为两相绕组中反电动势的向量和,则可得到电枢的回路方程为
U=2R亿+-5in(0_120°
)]=2R丄+ZT£
cos(^9-60"
)
式中U-电枢输入电压;
Ra-相绕组电阻;
ia-电枢电流;
Ea-反电动势的幅值。
由式(11.18)可求得电枢电流
ZTE.cosC^?
—60°
)2R.
进而则可求得屯磁转矩
T=Kri.^mO=KrU一/3-6『)引胡
2/<
1山也—讥20-60-)丄令.
210^270^33胪36(r*
090°
图11.10正弦分布磁场转矩波形
由式(11.20)可绘出正弦分布气隙磁场无刷直流电动机的转矩波形如图11.10所示,可以看到转矩随
转角有一定程度的脉动。
030°
90"
150"
2IF270"
360°
图lbJI三相桥式驱动的梯形fig场无刷直流电动机波形
新型无刷直流电动机通过改进设计,采用如加大极靴宽度等措施使得气隙磁场分布为梯形。
结合考虑三相桥式驱动的开关顺序,可以绘出三相丫接法的无刷直流电动机各相绕组中的反电动势EA.EB和EC,电
流iA、iB和ic,转矩TA.TB和Tc的波形(见图11.11)。
从波形图我们可以注意到以下几点:
(1)反电动势取决于磁场的波形,因此为相隔120°
的梯形波;
(2)各绕组导通时正处于梯形波磁场的平顶部分之下,得到的转矩为120°
的方波;
(3)理论上合成转矩丁为当时导通的两相绕组转矩的代数和,得到的电动机转矩是几乎没有波动的恒定转矩。
然而实现标准的梯形波磁场是不可能的,梯形波顶不可能完全平直;
此外,电枢电流在绕组间的换向也不是可以在瞬时完成的,电流波形应该近似于梯形波,因此转矩的波动总是有的,特别是在换相的时刻会出现转矩的明显波动。
无刷直流电动机的动态特性与普通直流电动机在本质上相同,此处不再详细推导。
基于MC33033的驱动装置
无刷直流电动机和普通直流电动机的重大区别是其多相电枢绕组安装在定子上,而转子则是由永磁材料制作。
电动机的运行必须有转子位置检测器和电子开关的配合来取代电刷和换向器。
这种电动机由直流供电,其外特性具有直流电动机的性能,因此仍然归属于直流电动机。
为了无刷直流电动机的正常运行,需要采用电子技术解决转子位置检测,正确的绕组驱动信号的提供,
以及调速运行时驱动电压调节等功能。
在现代电子技术的支持下,上述功能已经可以集成化为专用芯片(ASIC),这样的芯片有MC33033MC33035等。
下面结合MC33033进一步介绍无刷直流电动机驱动装置的一些细节。
MC33033是由ONSemiconductor生产的系列高性能单片直流无刷电动机控制器中的一种,具备实现一个开环的三相或四相电动机控制系统所需的全部功能,其中有转子位置编码、温度补偿的传感器电源、频率可编程的锯齿波振荡器、可访问误差放大器、脉宽调制比较器等,还配备有适合于驱动MOSFET的三个
集电极开路上桥驱动和三个高电流推挽下桥驱动。
其保护功能有欠压闭锁、电流限制和过热停机等。
其应用涉及开环速度控制、开停控制和正反转控制等。
MC33033的内部功能结构与工作原理如图11.12所示,各部分功能可概述如下。
1,
XJL-
II
ifhi气•尸七广1
1'
、(
+2
*?
&
、
比/I
PAM®
一
*
*-Fl
IL
无刷直流电动机能够运行的关键是必须首先了解转子的位置,然后根据转子的位置信息来决定驱动器中的开关切换并实现电枢绕组的换相。
因此转子位置检测是无刷直流电动机设计中不可缺少的组成部分。
执行这种功能的一般是利用光学或霍尔传感器检测转子的位置的换向编码器。
目前在无刷直流电动机中应用最多的是霍尔传感器。
以三相电动机为例,三个霍尔传感器一般安装在对应定子磁极的中心位置,这三个传感器在电动机内圆上的位置则有电气相位差为60°
、120°
、2
 升级会员
升级会员 