汽包水位自动控制系统设计Word文件下载.docx
《汽包水位自动控制系统设计Word文件下载.docx》由会员分享,可在线阅读,更多相关《汽包水位自动控制系统设计Word文件下载.docx(9页珍藏版)》请在冰豆网上搜索。
1.1影响汽包水位的主要因素
1)给水流量W
2)主蒸汽流量D
3)燃料量B
1.2控制指标
保证给水流量W和主蒸汽流量D保持平衡,维持汽包水位H在较小范围内波动。
1.3汽包水位控制对象的动态特性分析做各种主要影响因素的阶跃扰动,记录并分析汽包水位的响应曲线
1)给水扰动:
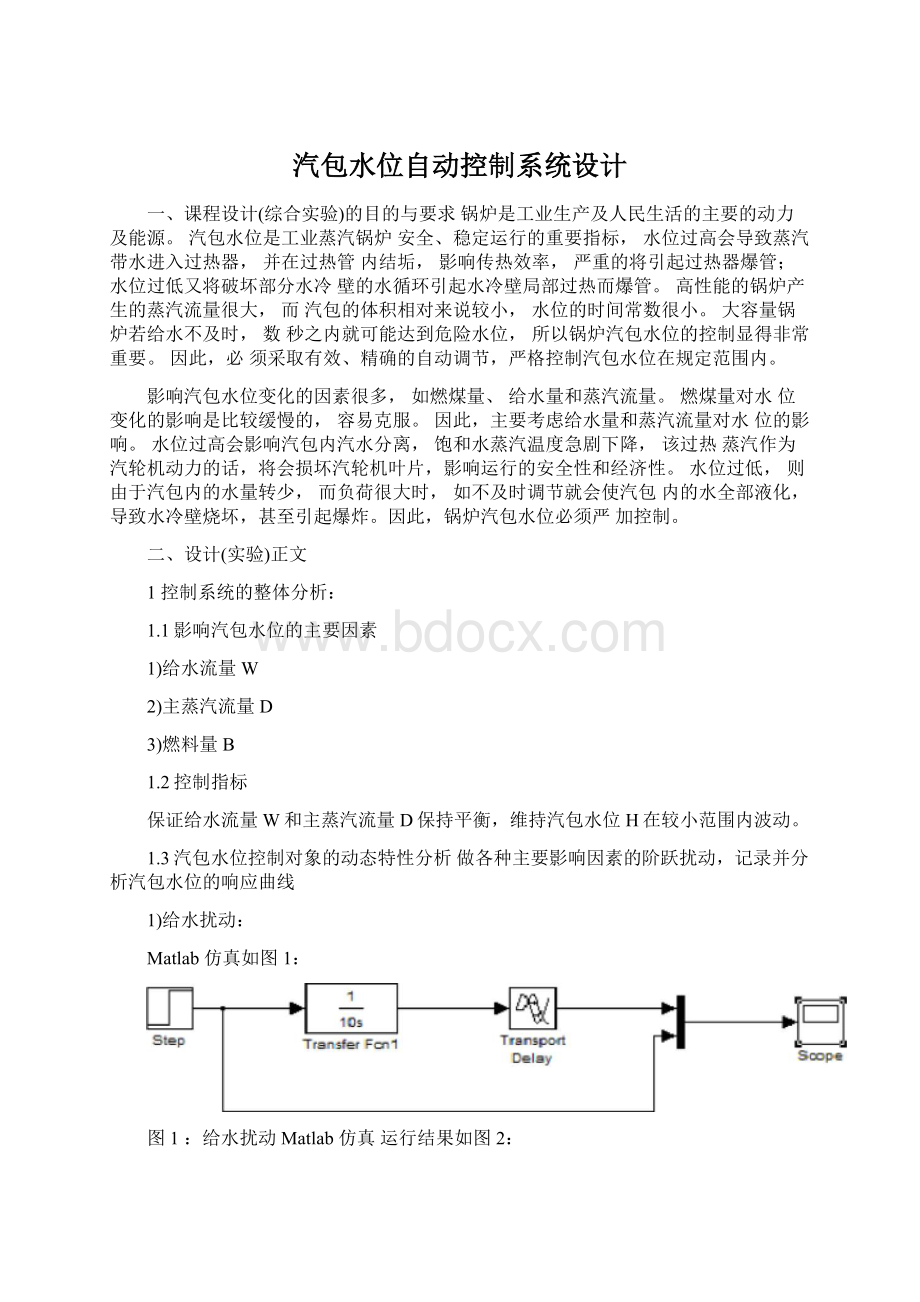
Matlab仿真如图1:
图1:
给水扰动Matlab仿真运行结果如图2:
图2:
给水扰动下的水位响应曲线
由被控对象在给水量扰动下的水位阶跃响应曲线,可以看出该被控对象无自平衡能力,且有较大的迟延,因此应采用串级控制,将给水流量的扰动消除在采用带比例作用的副调节回路中,以保证系统的稳定性。
2)蒸汽扰动:
Matlab仿真如图3:
图3:
蒸汽扰动Matlab仿真
运行结果如图4:
图4:
蒸汽扰动下的水位响应曲线
由仿真结果看出对象在蒸发量D扰动下,水位阶跃反应曲线有一段上升的过程,表现有“虚假水位”现象,(出现虚假水位现象的原因:
当负荷突然增加,蒸汽流量增加,汽包的压强变小,导致水气化,导致水位升高,同样的,当负荷突然减小,蒸汽流量减小,汽包的压强变大,导致水中气泡液化,水位降低,这两种情况都会出现虚假水位现象。
)这种现象的反应速度比内扰快,为了克服“虚假水位”现象对控制系统的不利影响,应考虑引入蒸汽流量的补偿信号。
通过上述对被控对象的动态特性分析,确定采用串级前馈三冲量控制系统:
1)因为串级系统可以有效克服二次干扰,尤其是本系统是有纯迟延环节,可以有效提高系统的快速性和准确性,改善了系统的动态特性,此外,串级系统对负荷的变化有一定的自适应能力。
2)通过静态前馈环节的加入,也可以有效改善负荷变化(蒸汽流量变化)带来的“虚假水位”现象,当蒸汽流量D突然阶跃增加,由于虚假水位现象会使水位增加,错误地使调节机构减小给水量,但引入前馈后,D的增加通过副回路的比例作用又使得调节机构增加给水量,所以通过合适的参数整定,将会有效克服“虚假水位”现象。
1.4,系统框图、控制系统流程图及SAMA图如下所示:
图6:
串级三冲量水位控制系统工艺流程图
在该调节系统中:
调节器接受汽包水位、蒸汽流量和给水流量三个测量信号控制系统说明如下:
1)水位H是主信号,任何扰动引起的水位变化,都会使调节器输信号发生变化,改变给水流量,使水位恢复到给定值。
2)主汽流量信号D做前馈信号,其作用是削弱由于“虚假水位”而使调节
器产生的误动作,用以改善蒸汽流量扰动时的调节质量
3)控制系统由两个闭合回路及前馈调节部分组成。
主回路由主调节对象Gp(s)、水位测量变送器Kh、主调节Gc1(s)和副回路组成;
副回路由给水流量W、给水流量变送器Kw、副调节器Gc2(s)、执行器Kμ组成;
前馈部分由蒸汽流量信号D、蒸汽流量变送器Kd构成。
4)副调节器的任务是当给水量扰动时,迅速动作使给水量保持不变;
当蒸汽量扰动时,副调节器迅速改变给水量,保持给水量和蒸汽量平衡。
主调节器的作用是校正水位,维持稳定水位不变。
SAMA图解析:
AI04
汽包液位
LT
给水流量
AI
蒸汽流量
FT
08
IA?
TI
0708
QC
K∫
T
≯≮
TR
A/M
AO
ZT?
(x)
H/L
∑-
05
QC02
QC03
蒸汽流量给定值06
01汽包水位出口信号故障
02给水流量出口信号故障
03蒸汽流量出口信号故障
04汽包水位偏差大
05给水阀位偏差大
06蒸汽流量变化幅度过大
给水切手动07
图名
汽包水位控制系统
图号
1
单位
华北电力大学
页号
第1页
设计
高欣
审核
制图
日期
2013.1.8
SAMA图中操作器要保证手自动的无扰切换:
主调节器跟踪是为了保证副调节器无偏差;
副调节器跟踪保证执行机构无偏差。
切手动的条件:
除了测量信号故障及调节器的输入偏差大,又加入了蒸汽流量变化幅度过大的要求,因为前馈的引入,虽然减小了“虚假水位”期间调节机构的误动作,但是并不能完全消除该现象,切水位H对蒸汽流量扰动D的响应速度比对内部扰动W的响应速度要快得多,所以当蒸汽流量变化过大时还是会引起误动作,故加入了蒸汽流量变化幅度的限制。
1.5控制系统的仿真及参数整定:
1)副回路的整定:
副回路的主要作用是消除二次扰动即给水阀的扰动,要求副回路的快速性和稳定性,保证给水流量的稳定。
整定时,断开主回路,把副回路看成是一个单回路,为保证其快速灵活的特性,此处采用比例调节。
副回路整定Matlab仿真:
图8:
副回路整定
其中设置PID调节器于比例调节,P=30。
仿真时,在20S时加入幅度为0.5
的阶跃扰动
仿真结果如图9:
图9:
副回路扰动测试仿真结果
从仿真结果可以看出,在20S加入扰动后,输出可以快速跟随输入,且稳态误差很小,可以满足内回路快速准确的要求。
2)主回路的整定:
整定主回路时,可以把副回路的整体看成一个比例环节,用衰减曲线法整定主回路。
主回路整定Matlab仿真:
图10:
主回路整定
主回路采用PI控制,其中P=0.9,I=0.015,微调副回路的比例P=35.
仿真结果如图11:
图11:
主回路仿真结果
衰减率为:
85%
3)给水扰动测试:
测试串级回路对给水扰动的控制效果,如图12:
在第20S加入给水扰动,可以看出系统的动态品质几乎不受给水扰动的影
响,满足整定时快速消除内扰的要求,最终系统的输出几乎无静差,且满足衰减
率的要求,其快速性和准确性得到保证。
图12:
给水扰动下系统的输出
4)加入前馈及蒸汽扰动测试:
加入静态前馈和蒸汽扰动及给水扰动,仿真Matlab图13所示:
图13:
加入给水及蒸汽流量扰动仿真结果如图14:
控制系统在加入两种干扰后,系统可以快速调节,最终也稳定在给定值,系统误差较小,超调量也满足了整定的要求,整体效果达到整定目的。
三、课程设计总结
此次课程设计的题目是汽包水位的控制系统,三冲量控制系统利用给水流量、蒸汽流量和水位三个参数进行液面控制。
该系统中汽包水位是主冲量信号,给水流量、蒸汽流量是辅助冲量信号,该控制系统经过给水流量和蒸汽流量扰动下的仿真实验,能有效地克服虚假水位和给水干扰对控制系统的影响。
从仿真效果可知,串级三冲量给水控制系统对各种典型影响因素的干扰均能做出快速反应,具有较高的调节质量和调节精度,能够维持汽包水位的稳定,保障机组的安全稳定运行,改善了高压汽包的运行状况,极大地提高了控制系统的性能,使高压汽包的液位波动很小,液位控制非常平稳。
在这次课程设计过程中,收获很多,深刻了解了汽包水位调节的整个过程,并在应用中体会到了串级控制和前馈控制的具体作用和实施的细节。
在系统参数的整定过程中,应用到了MATLAB仿真,大体掌握了利用MATLAB进行系统的调试的方法。
在绘制SAMA图过程中,应用Visio进行标准SAMA图的绘制,在掌握SAMA图绘制方法过程中也逐渐掌握了Visio的使用。
四、参考文献
1.《过程控制》金以慧主编清华大学出版社1993年4月第一版
2.《单元机组自动控制技术》中国电力出版社2008年1月第二版
3.《控制装置及仪表》吴勤勤主编化学工业出版社2002年8月第二版
 升级会员
升级会员 