第一章测试系统及其基本特性测试技术精Word下载.docx
《第一章测试系统及其基本特性测试技术精Word下载.docx》由会员分享,可在线阅读,更多相关《第一章测试系统及其基本特性测试技术精Word下载.docx(18页珍藏版)》请在冰豆网上搜索。
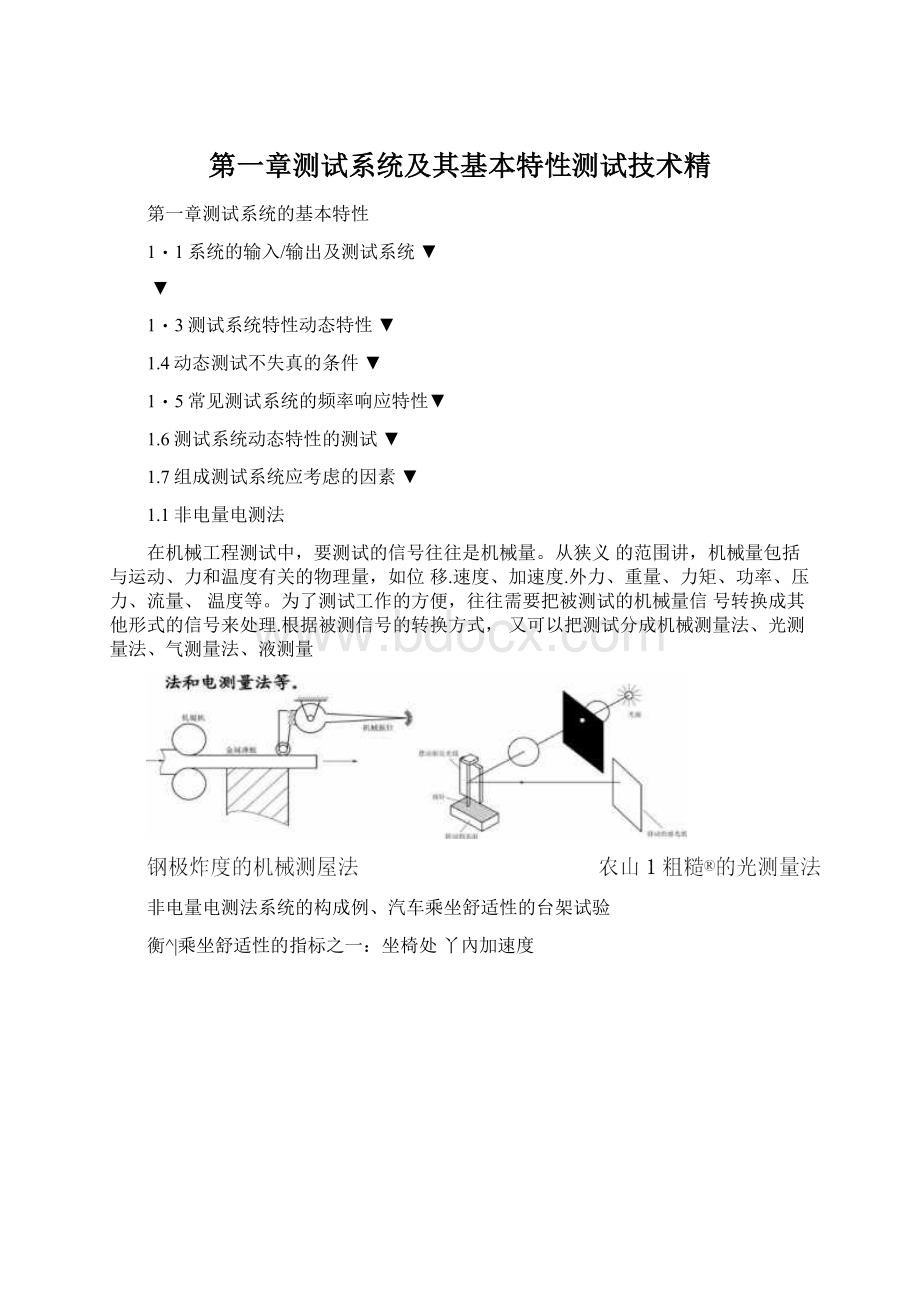
1.测试系统完成某种物理量的测量而由具有某一种或多种变换特性的物理装置构成的总体。
y(t)=kx(t}
X{t)
依测试的内容、目的和要求等不同,测试系统的组成可能会有很大的差别.
本章所说的“测试系统”,可以是指整个较复杂的测试系统,也可以是指测试系统中的各个小环节,例如一个传感器,一个记录仪或某个仪器中的一个简单的R滋波电路单元等・
例如,简单的温度测试只需要一个温度计,而对于机床动刚度的测试,则不但需要图1.2所示的各个装置,而且每个装置又将由多种仪器组合,测试系统显得相当复杂。
复杂测试系统(振动测量)
口
*[>
E]
面
测试装置自身的物理结构所决定的测试系统对信号传递变换的影响特性。
输入(激励)
测试系统
输出(响应)
(对信号的传递特性)
X(0
y(0
-v(z)y(t)
1)当输入、输出是可测S的(已知),可以通过它们推断系统的传输特性。
(系统辨识)由此根据测试要达到的要求正确合理选用仪器.
2)当系统特性已知,输出可测量,可以通过它们推断导致该输出的输入S。
(反求)(载荷识别)
3)如果输入和系统特性已知,则可以推断和估计系统的输出量。
(响应预测)
理想测试系统——线性时不变系统
理想的测试系统应该值的.确定-输出关系。
对于每一输入量都应该只有单一的输出量与之对应.知道其中一个量就可以确定另一个量.其中以输出和输入聂佳。
1输出和输入成线性关系。
即具有单值的、确定的输入-输出关系。
2系统为时不变线性系统.
1只能在较小工作范围内和在一定误差范围内满足线性要求。
2彳艮多物理系统是时变的•在工程上,常可以以足
够的精确度认为系统中的参数是时不变的常数。
1.2测试系疑的数学描述
对应,而且输出与输入之
作为测试系统来说,希望最终观察到的输出信号是确切地反映被测量,否则测试结果就会产生歧义。
也就是说理想的测试系统应该是每一个输入量,都有一个单一的输出量与之间还应当是线性关系,即具有单值的、确定的输入/输出关系.
W)1
f线性
OW)1
\线性
W)
OO
O
oo
o
♦
■
OOO
X(0:
°
。
x(Z)
O。
x(t)i(t)
图示的ROf氐通滤波系统其输入电压x(t),输出电压为y(t),根据电路电压平衡关系:
系统中i{t}=e^
I丿dt
据此可以建立H"
和间的运动微分方程:
RC•響+心呦
是一个一阶常系数线性微分方程
图示的扭摆装置据系统的动力学特性,可以建立系统的运动微分方程:
./、/、
J牌十⑴★今1-K呦
是一个二阶常系数线性後分方程
Utt
线性系统
测试系统输入x(t)和输出y(t)间的关系可以用常性微分方程来描述:
d'
'
y(t),,dy(t)
Cl..HCl..]:
••+eH6Z„y(Z)
”dezch”-'
*dt。
八
;
d”Z),;
/”-■(『)..;
厶⑴,;
c、
=b,nhb,„,:
1b.hb,.x{t)
dr"
I力心*dt°
式中,^n'
^n-1'
•••'
&
0禾Aa-1*•••*6均为些只与测试系统的特性有关的常数。
上述方程就是常系数微分方程,所描述的变线性系统,也称为定常线性系统.
一般在工程中使用的测试系统(测试装置)都是线性系统。
1.3线性系统的性质
(1)•叠加特性
线性系统的叠加特性
I
常数倍输入所得的输出等于原输入所得输出的常数倍,即:
若
贝IJ
比例特性示例
(3)•微分特性
系统对原输入信号的微分的输出等于原输出信号的微分,即
x(t)f⑴x*(t)Ty'
rt)
⑷•积分特性
系统对原输入传号的积分的输出等即
X(t)TJ(t)
jx(t)dt—►{y(t)dt
当初始条件为零时,于原输出信号的积分,若贝IJ
I
x(t)=Acos(e>
t+(p-^)j(t)=Bcos((ot+(p-V)
若系统的输入为某一频率的谐波信号,则系统的稳态输出将为同一频率的谐波信号,即
叠加原频率保持性,
BI
(C)系统线性近似
严》(0dvO),、
HG]
ClhClIJ•■+G]H)
«
du«
->
dfz■dt°
Jd"
x(t),严班/),dx(t),/、
=+b心…+2才+Z)
/实际测试系统中,系数都是随时间而缓慢变化的微变
"
—定的工作范围内和一定的误差允许范围,近似线性
测试系统的局部线形
如果测量时,测试系统的输入、时间而变化(变化极慢,在所观察的时间间隔内可忽略其变化而视作常量),则称为静态测量・
静态测量时,测试系统表现出的响应特性称为静态响应特性.
稳态输入
L理想测试系统的静态特性
/y(F)/'
v(Z)i/v(z),、
”d严心d严1'
dt2丿
d啦),"
5(0,厶⑴,,、
加+亠】+■••+/>
—+h,,x(t)
科dr心d严'
dt
注在静态测试中,输入和输出不随时间而变化,而输入和输出的各阶导数
>理想测试输入、输出之间呈单调、线性比例的关系。
即输入、输出关系是一条理想的直线,斜率为4bj*0
当测试系统的输入埔一增量△*,引起输出浚生相应
的变化△jB寸,则定义:
S=Aj/Ax
如果是线性理想系统,則
生丿=^=常数
AvX«
1-一位移传感器,当位移变化为1mm时,输出电压变化为则
灵敏度S=300/l=300inV/mm
2•—机械式位移传感器,输入位移变化为(MHmm时,输出位移变化为lOmnu则
放大借数8=10/0.01=1000
SI
1—标定IJII线
2——拟和rt线
工
、仏、'
■输入.X
静态测试灵敏度
标定曲线与拟合直线
线性度:
标定曲线与拟合直线程度。
偏离程度:
用非线性误差来衡量
非线性误差=B/AX100%
测试系统在输入g由小增大和由大减小的测试过程中,对个输入g所得到的两个数值不同的输出量之间差九,•弋,则定义回程误差为:
程误差=(h^,yA)X100%
(4).稳定度和漂移
稳定度是指测量装置在规定条件下保持其测量特性恒定不变的能力.
通常在不指明影响童时,稳定度指装置不受时间变化形响的能力.
漂移是指测量特性随时间的慢变化。
动态特性:
输入量随时间作快速变化时,测试系统的输出随输入而变化的关系。
在对动态物理童进行测试时,测试系统的输出变化是否能真实地反映输入变化,則取决于测试系统的动态响应特性。
例:
测体温.
(对信的传递特件)
>
(0
用特定的输入信号作用于测试系统,测量输出(已知),由此推断系统的传输特性。
(系统辨识)
1.传递函数(Transferfunction)
条件:
①线性系统的初始状态零②X(S),y(t)_Y(S)
进行拉普拉斯变换:
叫市©
rrwa
Xd^x(t},,df⑴•,,Mt)■「…
HHb.i+也h)
得J'
円drId严'
dt°
as"
+£
・$i+・・・+4S+d°
)Y(s)=dsyyMs+%)x(s)
系统的传递函数H(S):
H(s)=迪=“异”+休少”一+…+於+勺,
X(S)勺s”+%s心+…+卒+如
其中,s为复变量,S=a+j<
0.»
代表微分方程的阶数;
如/i=U/=2就分别称为一阶或二阶系统。
H⑸=如=“y+b心S心+…++b°
X(S)++…+®
S+ao
传递函数.描述系统动态特性
输出5
久列+b心$心+…+勺s+%
a3+勺“3'
1+•••+<
7,S+0。
传递函数的特点
只反映系统对输入的响应特性,与测量信号无关,与具体的物理结构无关・
3(s)中的分母完全由系统的结构所决定,分母中最高次覃/7代表系统微分方程的阶数。
而分子则激励点位置、激励方式、所测量的变量以及测量点布*椅况有关・
^H(S)是实际物理系统抽象为数学模型后的拉普拉斯变换,因此,物理性质不同的系统或元件,可以具有相同类型的传递函数H(S).
Qh(s)以测试系统本身的參数栽示出输入与输出之间的关系,所以它将包含着联系输入量与输出量所必须的单位。
H(s)=2m=勺仇…十勺S+Z^o
X(S)a,S'
+a”jS"
T+…+%S+ao
2・频率响应函数(Frequencyresponsefunction)
传递函数是在复数域中描述和考察系统的特性.频率响应函数是在频域中描述和考察系统特性。
H(S)=迪=勺心+…+於+%
X(S)d“S"
+q—S"
'
4cZjS+d。
H(阳w二—OX+ZUM严+…+H(M)+b。
以=代入H(s)得:
X(j0)Q“(j6))"
+a“](j0)"
T+・-+Q|(j0)+Qo
频率响应函数是传递函数的特例。
Y(jG))=X(jG))H{jo))
若线性系统,其输入是频率为e的正弦信
号W)=Xo23+Q,那么,在稳定状态下,根据线性系统的频率保持特性,该系统的输出仍然会是一个频率为®
的正弦信号,只是其幅值和相位与綺入有所不同,因而其输出可写成:
式中,岭和0为未知量。
兀3)=XodH固g(诃
 升级会员
升级会员 