机械系统仿真报告Word格式文档下载.docx
《机械系统仿真报告Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《机械系统仿真报告Word格式文档下载.docx(30页珍藏版)》请在冰豆网上搜索。
专业:
年级:
学生姓名:
学号:
指导教师:
1设计题目典型机械机构仿真分析
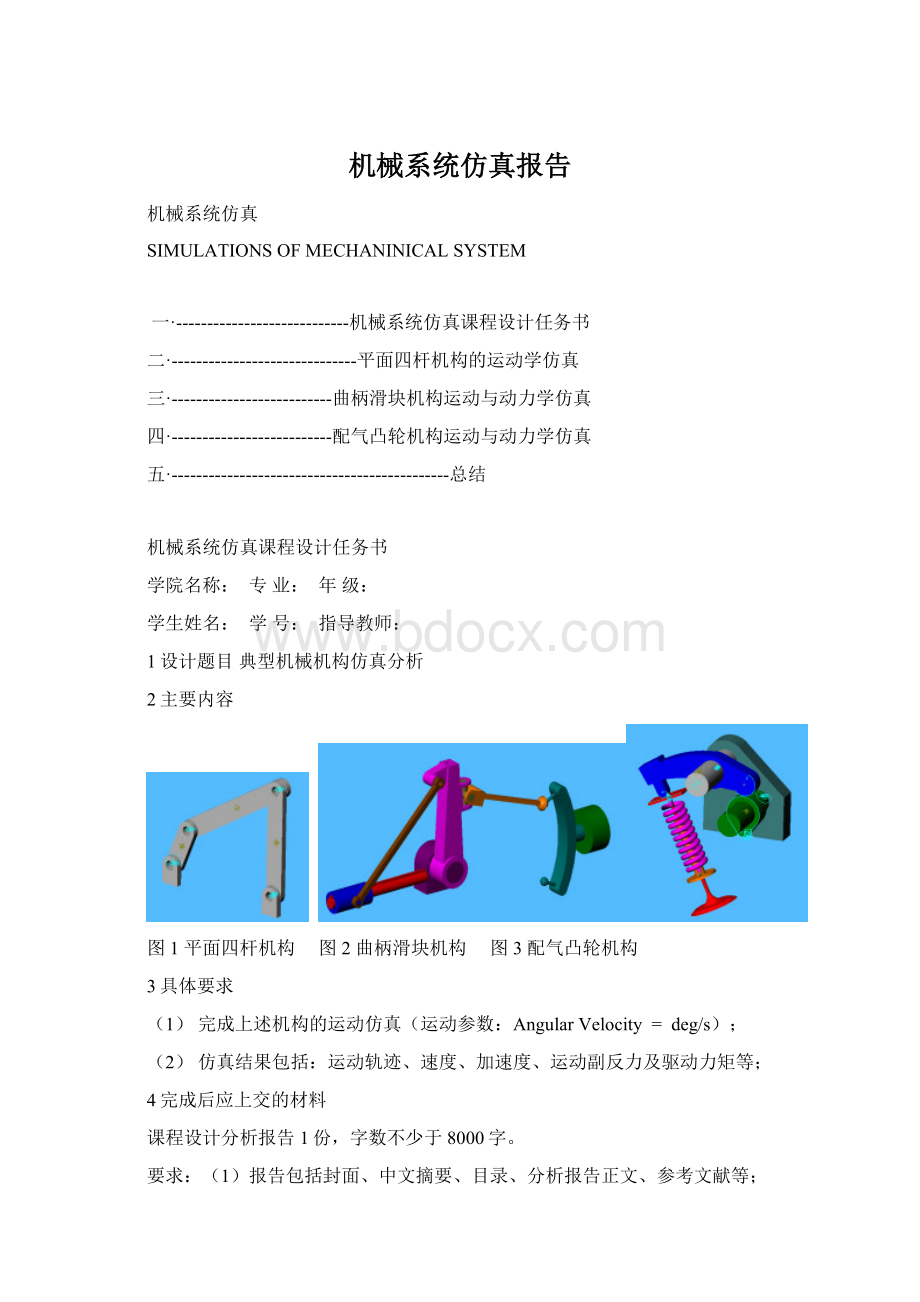
2主要内容
图1平面四杆机构图2曲柄滑块机构图3配气凸轮机构
3具体要求
(1)完成上述机构的运动仿真(运动参数:
AngularVelocity=deg/s);
(2)仿真结果包括:
运动轨迹、速度、加速度、运动副反力及驱动力矩等;
4完成后应上交的材料
课程设计分析报告1份,字数不少于8000字。
要求:
(1)报告包括封面、中文摘要、目录、分析报告正文、参考文献等;
(2)报告正文包括:
机械系统仿真的目的意义,仿真分析内容(应有必要的文字和插图),课程设计总结与体会。
5推荐参考资料
[1]张晋西.Solidworks及COSMOSMotion机械系统仿真.北京:
清华大学出版社,2007
指导教师签名日期2011年12月7日
系主任审核日期2011年12月7日
前言:
由于上机时间有限,而且有些图不方便截取,因此用网上查找图片(装配零件不同)代替,仅表示操作过程,另有不同的地方会具体说明。
数据:
运动参数AngularVelocity=389deg/s,(第三个零件配气凸轮机构取15290deg/s)
二、平面四杆机构的运动学仿真
一、具体要求
对平面四杆杆机构进行运动学仿真,绘制曲柄,连杆,摇杆质心位置处的运动轨迹、速度和加速度,绘制主运动副处的驱动力/力矩。
二、Solidworks2006SP0软件操作步骤
1、从程序或者桌面学习软件文件夹中启动Solidworks2006SP0软件。
2、在Solidworks软件中打开平面四杆机构的装配模型。
操作步骤如图2.1、2.2所示。
图2.1打开文件
图2.2平面四杆机构的装配模型
3、单击图2.2中管理器的按钮,管理器发生变化如图2.3所示。
图2.3Motion管理器
4、选中管理器中的“MotionModel”,右击鼠标弹出菜单如图2.4。
图2.4
5、选中弹出菜单中的“IntellimotionBuilder”,弹出IntellimotionBuilder对话框如图2.5所示。
对话框首先显示Units页,供用户设置力(换成常用单位牛顿)和时间单位(秒)。
单击“Next”继续,出现图2.6,供用户设置重力方向。
图2.5图2.6
6、定义可动的和固定的零件
单击“Next”继续,出现图2.7所示的对话框,在该对话框中供用户设置可动的和固定的零件。
图2.7
定义机构的可动的和固定的零件具体操作如下:
1)若要设置固定的零件(机架)“GroundParts”,则用鼠标选中图2.7右边框中的“机架-1”并按住鼠标左键拖动鼠标到“GroundParts”处释放,如图2.8所示。
(上机都是英文,因此part-1,part-5为固定零件)
2)若定义机构的可动的零件“MovingParts”,则先按住“Ctrl”键并用鼠标选中所有可动的零件:
“摇杆-1”、“曲柄-1”、“连杆-1”(part-2,part-3,part-4),然后按住鼠标左键拖动鼠标到“MovingParts”处释放。
也可以按照第
(1)步中的操作一个一个地定义可动的零件。
按照上述两个操作即可定义完成机构的可动的和固定的零件,此时图形显示区所显示的机构变成如图2.10所示的情形。
图中用相应的图表显示了机构构件连接的运动副形式和构件的重心位置,这样机构定义已全部完成。
图2.8图2.9
图2.10
7、运动副定义和属性设置
单击图2.9中的“Next”继续,出现图2.11。
图2.11
在图2.11所示界面上可对机构的运动副进行一些设置和定义。
如果展开连接,你的浏览器应如图2.12所示。
这些是从
SolidWorks中映射的约束,我们不必添加任何约束。
因此使用“IntellimotionBuilder”可不对机构的运动副作定义,由系统自动完成。
图2.12
8、机构的运动定义
单击“Next”两次,进入Motion属性页如图2.13所示。
选中图2.13框中显示的机构主运动副“Revolute”,如果展开它会看见它是连接“机架-1(part-1)”和“曲柄-1(part-2)”的运动副。
此时需要用户在右边选项中进行设置。
1)在“MotionOn”处选择“RotateZ”,因为平面四杆机构绕其Z轴旋转。
2)在“MotionType”处选择“Velocity”,此时属性页变化成如图2.14所示。
3)在图2.14中的“Function”处设置“Constant”。
4)在图2.14中的“AngularVelocity”处设置“389度”,即机构的指定角速度约束为389deg/sec。
完成上述设置后,单击“Next”进入仿真属性页如图2.15所示。
图2.13
图2.14
9、机构运动仿真
在图2.15所示的“Simulation”属性页,设置一些仿真参数如持续时间、帧数等等。
并在对话框窗口中按压仿真按钮“Simulation”。
然后观察图形显示窗口的情况。
图2.15
10、其他
仿真结束后,图2.15中的“Next”激活。
单击“Next”可进入图2.16所示的动画属性页。
一般不需要改变。
单击图2.16中“Next”可进入干涉检查属性页,在“Interferences”属性页可检查机构是否发生干涉,并在图形窗口显示。
若再单击“Next”则可进入VRML属性页,在“VRML”属性页可创建虚拟显示图形。
11、仿真后处理
仿真完成后,需要采集仿真结果,如机构各构件的位移、速度和加速度以及机构各运动副反力/力矩和机构的驱动力/力矩等。
如果需要绘制“连杆-1(part-1)”的运动参数,可在图形窗口的“Motion”管理器选中“连杆-1(part-1)”后单击鼠标右键,弹出如图2.17所示的菜单。
图2.16
图2.17
(1)选择弹出菜单中的“Plot”,则弹出供用户选择绘制的参数如图2.17。
以上为Solidworks2006SP0软件的大体操作步骤,需要改变或者添加的,会在以下两个零件进行说明。
选择“CMPosition”绘制“part-1曲柄”质心处“X、Y、Z”三个方向的位移如图2.18所示。
选择“CMVelocity”则可绘制“part-1”质心处“X、Y、Z”三个方向的速度如图2.19所示。
选择“CMAcceleration”则可绘制“part-1”质心处“X、Y、Z”三个方向的加速度如图2.20所示。
图2.18part-1曲柄质心处X,Y,Z方向的位移
图2.19part-1曲柄质心处X,Y,Z方向的速度
图2.20曲柄part-1质心处X、Y方向的加速度
(2)同理选择弹出菜单中的part-2的“Plot”,则可以绘制出part-2连杆的质心处X.Y.Z方向的位移,速度,加速度。
图2.21连杆patt-2质心处X、Y方向的位移
图2.22连杆patt-2质心处X,Y,Z方向的速度
图2.23连杆patt-2质心处X,Y,Z方向的加速度
3)同理选择弹出菜单中的part-3的“Plot”,则可以绘制出part-3摇杆的质心处X.Y.Z方向的位移,速度,加速度。
图如下所示:
part-3摇杆的质心处X.Y.Z方向的位移
part-3摇杆的质心处X.Y.Z方向的速度
part-3摇杆的质心处X.Y.Z方向的加速度
在“Motion”管理器中选中“Revolute”,选择弹出菜单中的“Plot”,则弹出供用户选择绘制的参数,此处可绘制机构的主运动副的驱动力/力矩。
如下图:
平面四杆机构的驱动力矩reactionforce
三曲柄滑块机构运动与动力学仿真
软件操作步骤如平面四杆机构,选择零件arm-1,crank-1,link-2为代表零件,仿真结束后,利用“plot”来绘制这三个零件的位移,速度,加速度图。
图如下
曲柄滑块arm-1质心处X,Y,Z方向的位移
曲柄滑块arm-1质心处X,Y,Z方向的速度
曲柄滑块arm-1质心处X,Y,Z方向的加速度
曲柄滑块crank-1质心处X,Y,Z方向的位移
曲柄滑块crank-1质心处X,Y,Z方向的速度
曲柄滑块crank-1质心处X,Y,Z方向的加速度
曲柄滑块link-2质心处X,Y,Z方向的位移
曲柄滑块link-2质心处X,Y,Z方向的速度
曲柄滑块link-2质心处X,Y,Z方向的加速度
曲柄滑块Reactionforce图
四,配气凸轮机构运动与动力学仿真
操作步骤如以上两个零件,但需要在rocker-1和valve-1交点处,以及camshaft-1和rocker-1处设置两个曲线碰撞两个运动仿真设置。
以及添加弹簧(spring).
首先,右键Constraints,选择AddCurve/CurveContact,将弹出对话框设置成如下形式:
添加弹簧,右键Spring,选择添加,之后选择3D模型上起始点,之后单击Apply应用.
由于如果运动参数和上两个零件设置相同,那么,配气凸轮将只运行一个很小的距离,不方便截取图片,因此将运动参数设置成15290,这样凸轮可以运动将近两圈,方便截图。
选择valve-1,rocker-1,camcraft-1为代表零件,可得以下截图:
配气凸轮valve-1零件质心处X,Y,Z方向的位移
配气凸轮valve-1零件质心处X,Y,Z方向的速度
配气凸轮valve-1零件质心处X,Y,Z方向的加速度
配气凸轮rocker-1零件质心处X,Y,Z方向的位移
配气凸轮rocker-1零件质心处X,Y,Z方向的速度
配气凸轮rocker-1零件质心处X,Y,Z方向的加速度
配气凸轮camshaft-1零件质心处X,Y,Z方向的位移
配气凸轮camshaft-1零件质心处X,Y,Z方向的速度
配气凸轮camshaft-1零件质心处X,Y,Z方向的加速度
配气凸轮的Reactionforce图
五总结
通过长达一个星期的仿真实习,让我对系统仿真的基本原理有了一定的认识;
系统仿真就是建立系统的模型并在模型上进行试验。
试验的方法可以分为两大类,一种是直接在真实系统上进行,另一种是先构造模型,通过对模型试验来代替或部分代替对真实系统的试验;
模型分为物理模型和数学模型,无力模
 升级会员
升级会员 