ADS教程第11章Word文档格式.docx
《ADS教程第11章Word文档格式.docx》由会员分享,可在线阅读,更多相关《ADS教程第11章Word文档格式.docx(9页珍藏版)》请在冰豆网上搜索。
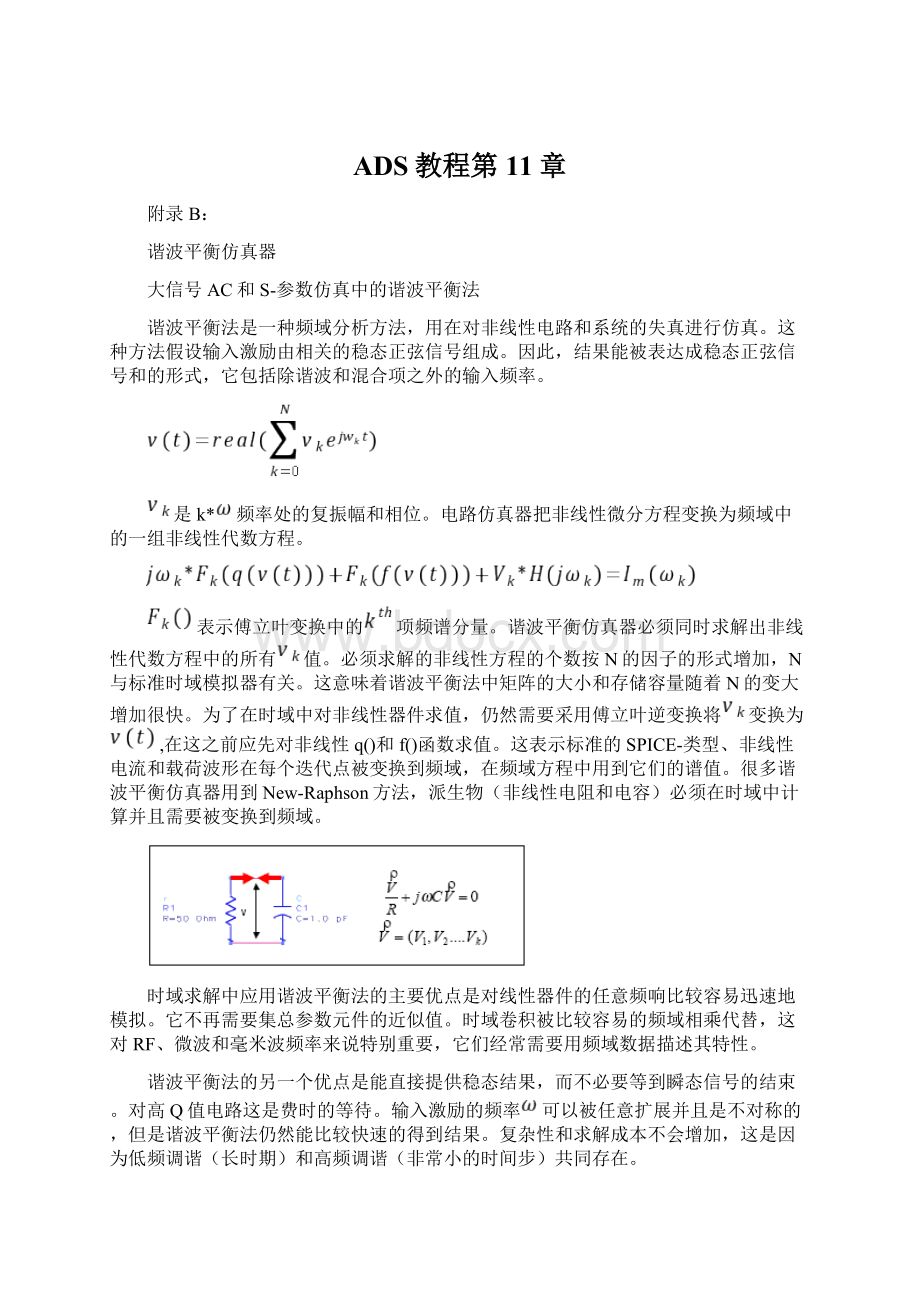
很多谐波平衡仿真器用到New-Raphson方法,派生物(非线性电阻和电容)必须在时域中计算并且需要被变换到频域。
时域求解中应用谐波平衡法的主要优点是对线性器件的任意频响比较容易迅速地模拟。
它不再需要集总参数元件的近似值。
时域卷积被比较容易的频域相乘代替,这对RF、微波和毫米波频率来说特别重要,它们经常需要用频域数据描述其特性。
谐波平衡法的另一个优点是能直接提供稳态结果,而不必要等到瞬态信号的结束。
对高Q值电路这是费时的等待。
输入激励的频率可以被任意扩展并且是不对称的,但是谐波平衡法仍然能比较快速的得到结果。
复杂性和求解成本不会增加,这是因为低频调谐(长时期)和高频调谐(非常小的时间步)共同存在。
谐波平衡法的限制是信号必须具有准周期性,且能被表示成一系列离散频率和的形式。
随着N值变大,需要的内部存储空间数量变的很大,内部矩阵的大小随着增加,这意味着在仿真任意的持续时间长的调制信号和具有很多不同的LO和RF频率系统的时候,它的效率将变低。
仿真高频电路的瞬态响应实际上是不可能的,因为波形必需是准周期性的。
频谱必需由离散的稳态的谱组成。
对于当今计算机的实际限制是对中等尺寸电路的64位调频。
谐波平衡法对于仿真模拟RF和微波问题是一种通常的选择方法,因为它们大多需要在频域中处理。
适合于这类分析的器件和电路包括:
在具有正弦曲线大信号驱动下的功率放大器、频率乘法器、混频器和调制器。
从高频电路和系统仿真中可以看出,谐波平衡法同时域卷积的瞬态分析法相比还有许多优点:
●设计者通常关心的是系统的稳态状况。
很多高频电路含有大的时间常数,为了达到稳态,通常的瞬态方法需要将很多低频正弦曲线在多个周期内合成。
如果采用谐波平衡法,可以直接得到稳态谱响应。
●应用的电压源具有典型的多频声正弦曲线,它有很窄或是很宽的剩余频带。
通常情况下,当前最高频率的响应比最低频率的响应幅度大很多倍。
瞬态分析法需要对最高频率正弦曲线的大量周期进行合成。
在很多实际情况中,是不允许花费这么多时间的。
●在高频下,很多线性模型在频域中能被很好的表示。
在时域中通过卷积法对这类元件的仿真将在精度、因果关系或稳定度上产生问题。
元件面板列表提供了谐波平衡仿真的种类:
Simulation-HB——一通用谐波平衡仿真
Simulation-LSSP——大信号S—参数仿真
Simulation-XDB——用于寻找增益—压缩点
在Simulation-HB面板中的HarmonicBalanceSimulation组件,用它能够得到频域中的电压和电流。
用这个组件可以得到以下结果:
●测定电路中电压或电流的谱成分,通过扩展,可以计算三阶截距(TOI或IP3),总谐波失真(THD),互调失真成份(在多频响激励中)。
●功率放大器满载轮廓分析。
●非线性噪声分析。
在Simulation-LSSB面板中,非线性LSSPSimulation组件使计算非线性电路的大信号S—参数变得容易,例如在使用功率放大器和混频器的场合中。
在后面的情况中,大信号S—参数通过“acrossfrequency”进行计算,即由RF输入得到IF输出。
为了写出仿真结果,需要用到基于文件的放大器(例如放大器P2D组件,在System&
Mixers面板中),在Simulation-LSSP面板中用P2D来进行分析。
用这个文件能提高随后的仿真速度。
在Simulation-XDB面板中,XDBSimulation组件可以自动确定放大器或混频器的XdB增益压缩点。
模拟器从一个小的输入值向上扫描,在得到满足要求的增益压缩点时停止。
以上提到的组件都有可选择的种类
●Small—signalmode(在LSSPsimulator中不可用)小信号/大信号分析法,当RF输入可被作为小信号扰动,同时大信号LO组件可用完全谐波平衡分析方式计算时,能提高混频器的仿真速度。
小信号/大信号分析法能用在许多涉及大信号和小信号调谐的特定场合中。
●NonlinearNoise用来进行非线性点噪声或扫描噪声仿真,并且可以计算带噪声的两端口参数。
●Oscillator—Analysis用来分析振荡器,包括相位噪声。
谐波平衡仿真操作
谐波平衡仿真使的电路的多频声仿真成为可能,它列出了互调频率变化。
这包括谐波间的频率变化。
不但电路自身产生谐波,每个信号源(激励)也产生谐波或小信号边带。
激励由与源有关的直到12次非谐波组成。
考虑到实际情况,系统中总的频率个数由于考虑到实际存储容量,交换空间和仿真速度而受到限制。
谐波平衡法是一种迭代方法。
它是基于以下假设,对一个给定的正弦激励,存在一个能用有限的傅立叶级数表示且满足精度要求的稳态解。
因此,电路的节点电压对所有频率成分呈现出一系列的幅度和相位。
从节点流入线性元件包括所有的分布参数元件的电流直接以频域线性分析的方法计算,从节点流入非线性器件的电流在时域中计算。
从节点中流出的所有电流在频域可以表示出来,根据Kirchhoff’s电流定律(KCL),在所有的节点上电流总合为0。
第一次迭代得到这样结果可能性是非常小的。
因此,误差函数用来表示所有节点上的计算电流之和。
误差函数是检测遵守KCL的数量标准,根据这个标准调整电压的幅度和相位。
如果方法收敛(即误差函数能得到一个很小的值),则所求电压的幅度和相位接近稳态值。
Krylov子空间求解器
现代谐波平衡仿真器依靠New—Raphson方法求解非线性系统的代数方程,它来源于大信号频域电路仿真问题。
每次New—Raphson迭代都需要将与非线性系统方程联系的Jacobian矩阵进行反变换,如果矩阵采用直接的方法计算,所需要的空间以增加,H是谐波个数。
因此,Jacobian的因式分解当H=500时所需要的RAM空间是H=10时的2500倍。
一种可替代的方法是采用Krylov子空间迭代法,例如GMRES(generalizedminimumresidual)。
这种方法不需要对Jacobian矩阵J直接存储,仅需要以J*V的方式运行矩阵—矢量乘积,其中V是任意矢量。
此时需要的存储空间变为,而不是上面谐波平衡法中的。
对大的谐波平衡问题,Krylov求解器可节省大量的存储空间。
类似的讨论说明可得到更高的计算速度。
大信号S—参数仿真基础
小信号S—参数,它是基于线性电路的小信号仿真,而大信号S—参数是基于非线性电路的谐波平衡仿真。
由于谐波平衡法是大信号仿真方法,因此它的求解包括非线性作用的影响,例如压缩。
这表示大信号S—参数能随着功率电平的改变而改变,由于这个原因,大信号S—参数也被称作依赖于功率的S—参数。
类似小信号S—参数,大信号S—参数的定义也是采用反射波和入射波之比。
入射波和反射波定义如下:
其中:
和是傅立叶系数,表示在端口i和j的基频电压;
和是傅立叶系数,表示在端口i和j的基频电流;
和是端口i和j的参考阻抗;
和是和的实部。
这个定义是小信号S—参数的一般定义形式,其中V和I是傅立叶系数而不是矢量。
对于线性电路,定义简化为对小信号的定义。
为了计算两端口的大信号S—参数,仿真器需要进行以下操作。
E.在端口2连接一个与参考阻抗共轭的阻抗,在端口1用户给定一个功率电平为P1的信号,采用一个阻抗值与端口参考阻抗共轭的源。
用谐波平衡法计算端口1,2的电流和电压值,由此计算S11和S21。
F.在端口1连接一个与参考阻抗共轭的阻抗,在端口2施加一个功率电平为的信号,采用一个阻抗值与端口2的参考阻抗值共轭的源,用谐波平衡法计算端口1,2的电流和电压值,由此计算S12和S22。
非线性噪声仿真基础
谐波平衡仿真的结果是数据集的输出,并用来确定非线性噪声仿真的周期工作点。
周期工作点是电路在基波、谐波和混频情况下的稳态电压和电流。
每个上部和下部的噪声边带被每个大信号频谱分量模拟。
因此,噪声频率被模拟的个数是谐波频率的两倍,需要存储稀疏矩阵的空间变为4倍(除非选中Krylov项)。
所以,非线性噪声仿真所需要的存储空间是正常谐波平衡仿真的4倍。
对Maximumorder设定比较低的参数值可以限制所需的计算空间。
在噪声仿真中如果存储空间不够用,在输入中去除大信号调频项,并用一个Term元件代替,也可以在谐波平衡仿真组件中减少调谐个数,噪声数据的仿真结果不会有很大的变化。
如果需要噪声数据,给电路添加端口。
另外,因为用到噪声数据的单边带定义,必须由参数Inputfrequency指定正确的输入边带频率。
此输入频率可同感兴趣的点噪声频率混频。
如果没有输入指定频率,则它被假设和点噪声频率相同。
这种情况下,输入和输出频率是相同的,放大器就是一个典型的例子。
输入频率是指进入混频器RF端口的频率。
对混频器来说,输入频率由本地振荡器频率和噪声频率组成的方程决定。
这些值之间采用和或差的形式取决于发生的是上变换还是下变换。
如果在上边带或是下边带中没有找到满足指定输入频率的值,将会产生一个警告并且采用最近的边带。
如果需要带噪声的两口参数,例如、或是,选择Calculatenoisytwo–portparameters。
仅会计算被要求节点处的噪声数据。
噪声电压和电流同噪声参数带宽的平方根作比值,默认的带宽是1Hz,所得结果的单位是。
在分析噪声电压和电流过程中,包含的端口噪声告知仿真器要包含端口噪声的分布。
采用小信号频率能给出比较精确的结果,但是需要较多的空间。
振荡器仿真基础
振荡器是非线性器件,采用正反馈来获得振荡,环的增益必须大于1且不能产生相移。
如果将振荡器放在电路中的恰当位置,OscPort(振荡器端口)组件检查当前条件。
在进行环增益计算时,振荡器端口对所有的谐波频率短路,并且对基频成为一个单向隔离器。
在整个计算过程中,端口把闭环振荡器变成一个开环放大器。
虽然要振荡开始需要环的增益大于1,在一定程度上振荡幅度也应被限制。
这种限制的产生来自于某些有源器件的饱和或是AGC(activegaincontrol)网络的结果。
无论哪种情况,限制活动都需要环阱是信号振幅的函数。
这需要进行非线性分析。
仿真器采用迭代的方法寻找一组非零的稳态求解。
当振荡器仿真开始时,谐波平衡法寻找运算规则,通过改变工作频率来寻找振荡频率,获得振荡电路的最后工作频率和功率电平。
仿真器自动搜索振荡器的工作特性。
自动寻找过程包括以下3步:
6.寻找满足电路线性振荡条件的频率。
7.寻找满足条件的频率和功率,在此条件下振荡器的开环增益是1,相位角为0度。
8.采用完全闭环谐波平衡分析。
在此过程中,进一步提高频率和振荡功率的精度。
相位噪声仿真
振荡器相位噪声分析计算振荡器载频的噪声边带。
它也计算以下内容:
●标准的频率变换
●幅度噪声到频率噪声变换
●噪声的频率迁移。
这是由于元件在大振荡信号条件下的非线性特性产生的。
通常能观察到上变换闪烁噪声的影响。
●由于振荡信号使偏置改变
 升级会员
升级会员 