水声定位算法学习总结汇编Word格式.docx
《水声定位算法学习总结汇编Word格式.docx》由会员分享,可在线阅读,更多相关《水声定位算法学习总结汇编Word格式.docx(11页珍藏版)》请在冰豆网上搜索。
首先信道由于受到信道噪声、多径衰减(Multi-pathFading)和非视距阻挡(Non-of-SightBlockage)的影响[1],具有时变特性,严重偏离上诉模型;
其次衰减率会随外界环境的不同而发生相应改变。
根据接收到的信号估计出的距离d将有很大误差。
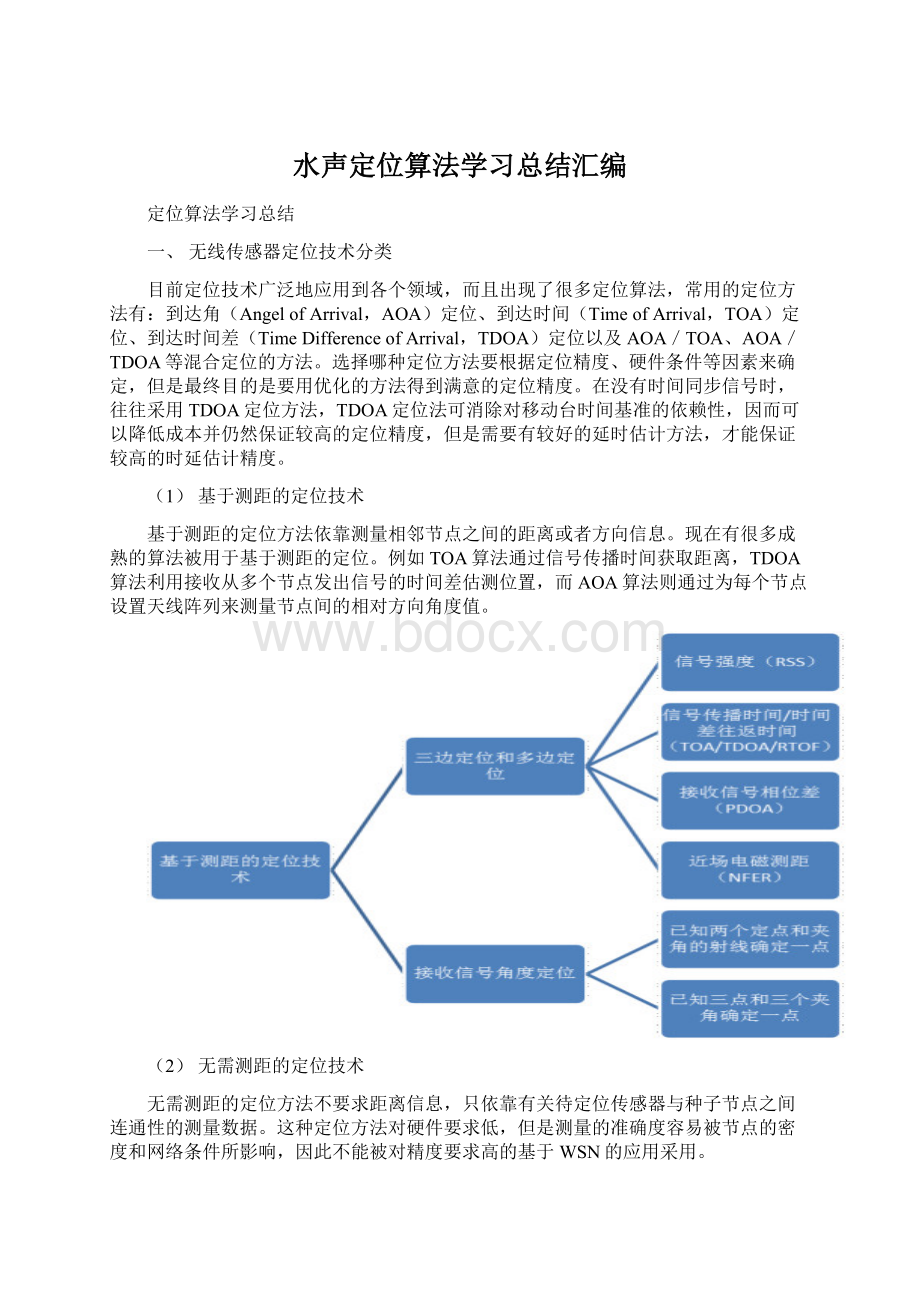
(2)信号传播时间/时间差往返时间(TOA/TDOA/RTOF)
a)到达时间(TOA,TimeOfArrival)
使用发射机到接收机之间往返的时间来计算收发机之间的距离,要求发射机和接收机严格时间同步。
b)往返传播时间(RTOF,Roundtrip-Time-Of-Flight)
发射机和接收机可属于不同的时钟域,基于信号传播时间的测距精度由时间差的测量精度决定。
时间差的精度由参考时钟决定。
c)到达时间差(TDOA,TimeDifferenceOfArrival)
使用两种不同传播速度的信号,向同一个方向发送即可。
图1示意图
(3)接收信号相位差(PDOA,phasedifferenceofArrival)
通过测量相位差,求出信号往返的传播时间[2],计算出往返距离,其中,是信号频率,是信号的波长,是发送信号和反射信号的相位差,由上式可知d的范围是[0,]。
不同的距离如果相差倍,则测量获得的相位相同。
通过相位差的方式测量距离,需要知道距离d范围,才能够确定出n的值,估算出距离。
(4)近场电磁测距(NFER,NearFieldEMRanging)
利用近场与磁场的相位差来测量距离,射频信号包括电场和磁场两部分。
例如,当目标距离接近发射天线时相位相差90o;
在距离相差1/2波长时,相位差接近0。
由此可以通过电场与磁场的相位差,估计到天线的距离。
近场电磁测距方法的测距范围在0.05之间,最佳测量范围0.08之间。
该方法由于距离限制,现有的定位系统很少采用。
三、TDOA算法研究
1.基于测距的定位技术算法对比分析
算法种类
RSS
TOA
RTOF
TDOA
PDOA
NFER
条件需求
信号衰减量
发射和接收机之间的往返时间
往返传播时间
目标发射信号到达各个节点的时间差
接收信号相位差
相位差与距离的准确关系
优点
易于实施,对硬件要求较低
发射机和接收机可属于不同的时钟域
对待测节点没有时间同步要求
缺点
算法模型受环境影响大,精度较低
要求发射机和接收机严格时间同步
使用射频信号时要求高精度时钟
需要首先知道往返距离范围
对测量距离有限制
2.TDOA算法特性
(1)对目标时间基准无依赖性
选用TDOA算法对待测节点没有时间同步要求。
在无线传感器网络中,实现节点之间的时间同步较为困难。
而且考虑在实际应用中,一般情况下,我们无法获取待测目标的准确时间信息。
TDOA算法只需获取目标发射信号到达各个节点的时间差。
根据一个时间差信息即可将目标定位在一个双曲面上(如图3所示),那么假如有三个时间差信息,则三个双曲面可交与一点,这一点即为目标位置。
由此消除了对目标时间基准的依赖性[3],应用场合得以拓展。
图3TDOA双曲面模型
(2)适合水下环境要求
对于水声定位系统,如果采用电磁波传递信息,则在水下将很快衰减。
因此只能够使用声波进行通信。
由上述分析可知,TDOA算法必须依靠高精度的参考时钟来保证其精确度。
对于低成本、低带宽、无参考时钟的无线传感器网络来说,获得高精度的时钟本身就是一个挑战。
如果用射频信号进行测距,的时钟精度就有300m的误差。
但使用超声波等低传播速率信号进行测距时,1ms的时钟精度便可达到30cm的精度。
可见,用超声波信号实现的TDOA算法不仅可满足水下环境的要求,而且能保证足够的定位精度。
3.TDOA算法分析
在对目标信源进行定位时,因为无法获得时间同步信号而没有时间基准,常采用TDOA技术得到时延估计值,进而得到目标信源到两个基站之间的距离差,多个TDOA测量值就可以构成一组关于目标信源位置的双曲线方程组,求解该方程组就可以得到目标信源的估计位置[4]。
图4TDOA算法模型
设目标节点的坐标E为E=(x,y,z),其余N+1个已知位置的节点为P0,P1,...,Pm,...,PN,它们的坐标分别为Pm
=(xm,ym,zm),0≤m≤N。
则目标与任一节点的距离为
(1)
为了简化计算可设主节点的坐标为(0,0,0),那么为
(2)
距离是水中声速v与传播时间的乘积,TDOA算法需要波面到达每个副节点P1,...,Pm,...,PN与到达主节点P0的时间差值,即
v=v-v(3)
v=-(4)
图5
为了更好地说明这一过程,如图5所示。
P0和P1分别是节点P0,P1接收到E的发射波形,可见P1接收到信号要比P0延迟5ms左右,相当于的值。
对P0和P1的波形求互相关函数可得cross-correlation波形。
其峰值时刻对应的时间值即为时间差。
上述仿真分析针对的是连续时间信号,对于离散时间信号可根据式(f*g)[n]进行计算。
1)非线性定位算法
通过以上分析知要得到目标的坐标值,至少需要三个时间差信息,因此至少需要P0,P1,P2,P3四个已知位置的节点[5]。
设目标到达主站P0(0,0,0)与各副站的距离差为,则化简可得
(5)
(6)
其中:
,。
对于3个距离差测量值可以组成如下非线性方程组
(7)
先把r作为常量,求出x,y,z关于r的代数式,然后代入中解出r的值。
r的值确定后,x、y、z的值便可确定。
由整个计算过程可知这种非线性算法得到的解可能不唯一,需要解模糊。
此外计算量过大也是其缺点之一。
针对上述非线性算法存在的问题,我们在设计中采用基于最小二乘法的牛顿迭代定位算法对数据进行处理。
最小二乘法定位精度不是很高,但可对目标信源的位置作初始估计。
有了这一估计值,再使用牛顿迭代法对初始结果进行修正,则不但可以提高定位精度,而且可以加快计算速度,节省时间。
1最小二乘法估计初始位置
由(8)可得矩阵形式的线性方程组
HX=L(8)
其中H=,X=,L=
要求解X,必须使残差r=HX—L的平方和最小,即
f(x)=(9)
对上面的方程求导并令其为零,得
(10)
若为非奇异阵,则得到(11)的最小二乘法估计为
(11)
2牛顿迭代法修正
(1)将用最小二乘法解得的信源位置X设为初始值,代入牛顿迭代法的关系式[3],求解迭代后的位置为(k=0,1,2,…,n-1);
(2)分别将和代入n-4个冗余函数表达式(i=5,…,n),利用最优化方法,(i=5,…,n),为根据测距精度要求给定的值,,为给定的精度要求;
(3)判断是否满足条件或,如果满足其中的一个条件,则迭代过程结束,输出,否则将结果作为初始值,即,继续上面的步骤,直到满足条件为止。
2)线性定位算法
以上的非线性算法采用一个主节点和三个副节点,可测得三个时间差信息,即三个方程。
虽然这样可用最少的节点数目完成定位任务,节约成本,但是有着需解模糊、计算量大、定位实时性较低等缺点。
此时如果增加一个副节点P4,则线性方程组变为
(12)
我们认为:
创业是一个整合的过程,它需要合作、互助。
大学生创业“独木难支”。
在知识经济时代,事业的成功来自于合作,团队精神。
创业更能培养了我们的团队精神。
我们一个集体的智慧、力量一定能够展示我们当代大学生的耐心.勇气和坚强的毅力。
能够努力克服自身的弱点,取得创业的成功。
此时可把r作为求解变量,直接求解四元一次线性方程组。
关于DIY手工艺制品的消费调查由(13)可得矩阵形式的线性方程组
与此同时,上海市工商行政管理局也对大学生创业采取了政策倾斜:
凡高校毕业生从事个体经营的,自批准经营日起,1年内免交登记注册费、个体户管理费、集贸市场管理费、经济合同鉴证费、经济合同示范文本工本费等,但此项优惠不适用于建筑、娱乐和广告等行业。
HX=L(13)
调研要解决的问题:
可得X=H\L,由此可得出目标信源的位置。
由求解过程可以看出,线性定位算法相比非线性算法解法简单,无模糊,求解精度高。
该方法就是常用的五元十字TDOA定位算法。
4.仿真与分析
1、DIY手工艺市场状况分析基于上述算法分析,我们对基于最小二乘法的牛顿迭代算法和五元十字定位算法进行了Matlab仿真实验。
(二)DIY手工艺品的“热卖化”4.1仿真实验
(1)基于最小二乘法的牛顿迭代算法
现在是个飞速发展的时代,与时俱进的大学生当然也不会闲着,在装扮上也不俱一格,那么对作为必备道具的饰品多样性的要求也就可想而知了。
图6仿真实验传感器布阵图
如图6所示,主节点坐标为=[0,0,0],三个副节点坐标分别为=[2,0,1]、=[0,2,0]、=[2,2,0]。
假设待测目标S的位置是S=[3,4,5]。
PS:
消费者分析计算可得
H=,L=
图1-4大学生购买手工艺制品目的最小二乘法估计
可见“体验化消费”广受大学生的欢迎、喜欢,这是我们创业项目是否成功的关键,必须引起足够的注意。
=,可见最小二乘法的估计值与目标的实际位置相差较大。
但通过牛顿迭代可提高精确度。
下面给出牛顿迭代法的部分Matlab代码:
%牛顿迭代法解非线性方程组
%输入参数:
迭代初值,迭代方程,精度要求
function[h]=Newton(start_newton,F_newton,p_newton)
F_temp=start_newton;
temp=[0;
0;
0];
whilesum(abs(temp-F_temp))>
p_newton
temp=F_temp;
F_temp=F_temp-subs(F_newton,{'
x'
'
y'
z'
},{F_temp
(1),F_temp
(2),F_temp(3)});
end
h=F_temp;
将最小二乘法的估计值代入,通过迭代后可得最终定位结果S’=[2.9998
 升级会员
升级会员 