LGO基线解算详细过程Word格式.doc
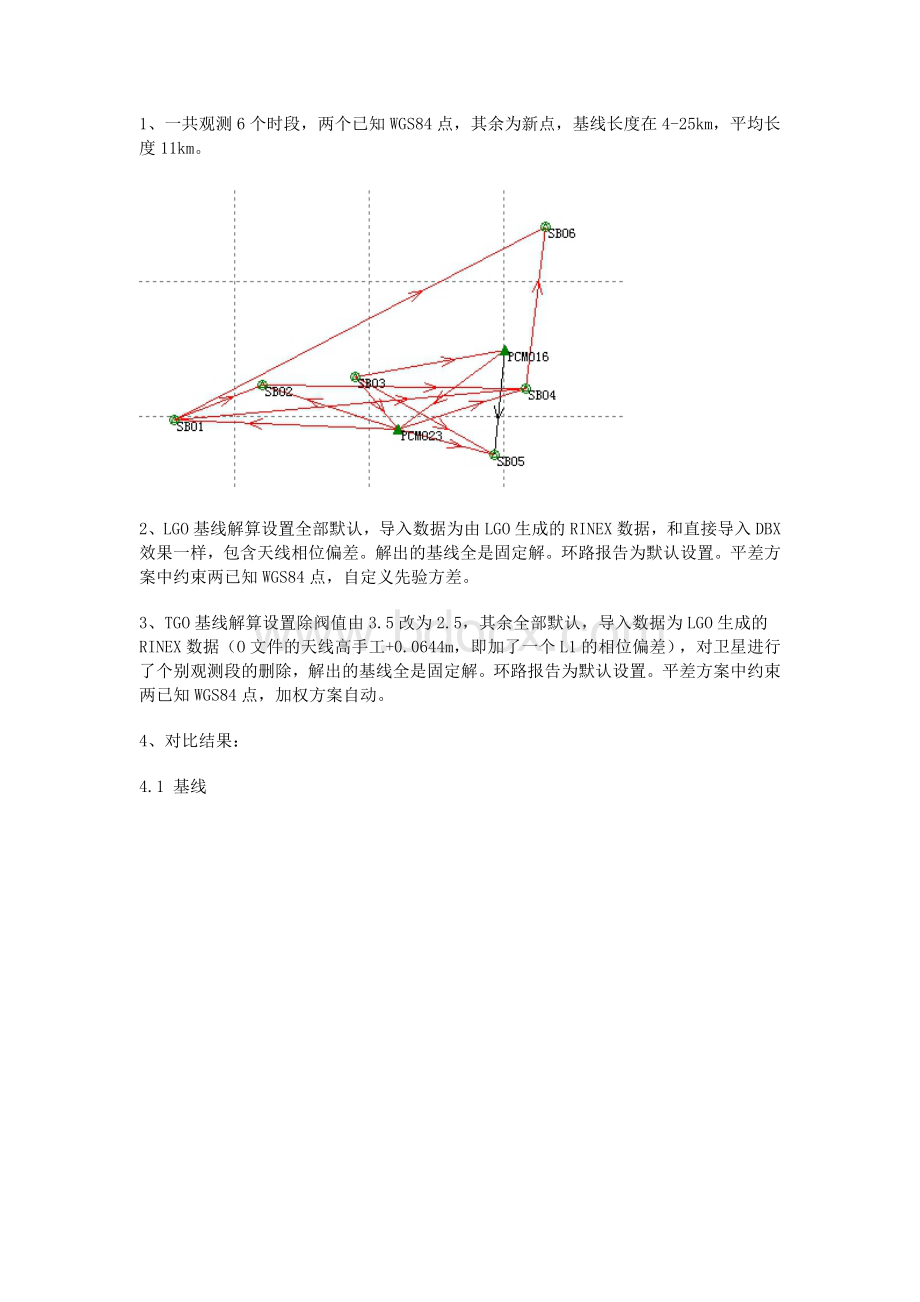
《LGO基线解算详细过程Word格式.doc》由会员分享,可在线阅读,更多相关《LGO基线解算详细过程Word格式.doc(23页珍藏版)》请在冰豆网上搜索。
两种软件解算精度相当,中误差差值在0-3mm,但是TGO还是略逊TGO,由于无约束平差中起算点的不同,两套结果的绝对值无法进行比较,但是如果起算点相同,平差结果的差值应当在1cm以内。
这里要提到的一点时,无论使用哪种软件,如果工区内没有WGS84起算点,如果又是使用无约束平差的结果来求取转换参数的话,那么整个网,包括以后的RTK工序,都必须基于同一个WGS84起算点,而如果一切默认,那么使用LGO和TGO求出的转换参数就会不同,且点位差值会有一系统偏差,以此为例,则纬度和纬度差值0.03秒也就是0.9m,大地高差值2.5m,这是比较可怕的局面。
必须加以注意。
而如果无约束平差的结果没有用途,仅用来检核粗差,那么就可以不用顾忌软件自己选取那一个点作为其算,直接默认即可,在约束平差的时候,加上必要的位置约束以后,相当于一个系统的平移,不会影响最终的平差结果。
4.4约束平差
约束平差方案一致,都约束已知84点PCM016和PCM023,绝对约束,默认中误差为0。
平差结果对比如下:
为了便于对比,平差结果按照UTM49S投影显示,可以看出:
两种软件平差点位北东坐标差值在0-4cm之间,高程差较小,1cm左右。
但是这样的结果是不具备对比性和统计性的。
平面坐标的较大差值,在前面的基线长度较差已经有所反应。
因为不可能做到LGO和TGO进入平差阶段的基线解完全一样,所以就无法保证最终平差的极度吻合。
但是,这样的差值在物探测量控制网阶段,是完全可以接受的。
同时佐证了前面的莱卡天线在TGO中的改正方案的正确性。
不单单是物探规范,几乎所有的行业规范,对基线同步环闭合差的检核都过于严格,而异步环却又过于松懈,在这一点上,或许LGO是做的更加合理的:
不严格区分同步环异步环,只是统计最小独立环的闭合差。
我也坚信,莱卡的经验要优于制定规范的专家们,所以:
在监理或者甲方对闭合环路要求不完全照搬规范的话,少量极小的同步环超限是完全可以接受的,且很多时候是必须的,但是异步环是绝对不能够超限的。
期待我们的GPS控制测量规范能做出更加合理的调整。
经过近期对TTC、Pinnacle、Waypoint三个软件的摸索,感觉真的没有再做进一步研究的必要性。
因为界面太丑,更新太慢,操作繁琐。
我喜欢简单严谨。
还是返回头重新拾起尘封的LGO。
这次重新开始LGO,秉承的原则是:
不急不躁,稳扎稳打,不浅尝辄止,主要是深入帮助文件里面去,解决以前遇到的仍不明晰的细节问题。
ok,let'
sgo!
1、练习内容:
GPS静态后处理
2、软件版本:
7.0中文特别版,全部模块可用。
3、样本数据:
LGO自带的static数据。
4、地方坐标系统:
UTM32N,白赛尔1841椭球。
5、新建项目:
learn-gpsstatic,坐标系统WGS84。
6、导入原始的DBX观测数据。
发现由于是样本数据,所以各点观测比较随意,最短时间有9min,最长时间有60min,且各观测段犬牙交错,基线解算决定采用手工方法。
因为是练习,所以这次很详细的阅读了相关的帮助文件。
LGO郑重的两个重要提醒。
值得仔细揣摩:
如果在外业作业中,在同一个作业(JOB)内,对同一个测量点的不同测量时段的静态数据采用同一点号作为点名进行保存,则在使用LGO进行数据处理时,要特别注意正确选择所需要的测量时段的数据。
否则,可能会导致出现严重的数据处理误差。
如果在外业作业中,在同一台接收机的同一个作业(JOB)内,对在不同测量点上所采集的静态数据采用同一点名进行保存,则在使用LGO进行数据处理时,要特别注意首先使用“单点定位解(SPP)”功能区分出不同测量点的数据,再正确选择所需要的测量点及测量时段的数据。
也就是说,在实际的基线解算中,我们应当根据预先的计划来合理的选取可能出现的基线,由于野外调度和实际情况的需要,往往会在我们不希望两个测站形成同步观测的时候出现了同步观测,这时候,就应当采用手工模式或者设置形成基线的最小时间间隔,来达到想要的结果。
7、GPS处理参数的设置
GPS处理由两个主要的部分组成:
选择观测时段和选择处理参数、处理本身。
用户需要干预的是选择时段和选择处理参数。
因为处理本身无需任何干涉
A、LGO的基线处理模式分手工和自动两种。
手工处理模式可以根据用户结合实际情况及需要进行设计如何计算数据。
自动处理模式是从选择的时段中自动处理根据一组约束条件组合而成的所有的合理的基线。
它只能选择流动站,不能选择参考站。
LGO会自动选择合适的参考站。
处理顺序依赖于“自动处理参数”中定义的参数。
AAAA,自动处理参数选项卡:
a、只有当处理模式设置成自动时,才可以使用自动处理参数。
自动处理参数实际上是协助用户在自动处理的模式下进行基线计算的选取。
“公共时间数据的最短时间”:
同步观测时间的最短时间。
同步时间短于300s,不予解算。
这在剔除个别较短重叠时段时十分有用。
“最大基线长度”:
解算基线的最大长度。
此选项,我能想到的大概就是批量处理个别较长基线时用到,如长度超过200km的个别基线使用精密星历。
批处理比较有用。
另外:
此项可输入的最大值是1000,我曾尝试解算超过1000km的基线,结果宣告失败,改成手工模式,可以没有限制。
。
“处理方式”:
选择“全部基线”的话,LGO按照基线最短时间和最大基线长度为前提处理所有可能的相关基线。
选择“独立设置”的话,LGO只处理一组独立的基线集合。
在N个点的网中中有N-1条独立基线。
但是线性相关的基线也可以视为独立基线(例如三角形的三个边),前提是:
三条边没有同时观测。
“坐标选择策略”:
选择“距离”,第一个参考点的最短的基线首先被计算,然后计算次短基线。
选择“时间”,具有最长公共时间的基线首先被计算,然后计算次长基线。
如果“按时段”勾选,则在满足处理模式和选择策略的两个条件下,选最长时段的点做为第一个参考站。
这个选项似乎意义不大,但是如果有一点的一个观测时段巨长,可以考虑勾选,如长时间长距离连测的点。
“使用浮点解基准”,如果一个项目仅仅只有浮点解存在,则允许使用该点作为参考站做进一步处理。
这个是极端情况。
遇到的可能性不大。
“重算已处理基线”,如果勾选,则原来已经计算了并且存储过的基线将再次被计算。
这个选项比较任性,特别对于基线比较多需要多次设置才能完成最终所有基线的解算,一次只能出来几条合格的基线,不勾选此项,可以保证已经成功处理的基线不丢失解算。
那什么时候才勾选呢?
一般不勾选,但是应该也有勾选的时候,那就是闭合环路出了很大问题,不过那个时候似乎可以直接删除结果了,更直接。
呵呵。
“计算控制点间的基线”,此项似乎一般不使用。
似乎。
但是似乎第二第三时段复测基线的时候为了和第一时段统一基准的时候。
BBBB、“策略”选项卡
确实应该把策略先进行阐述,LGO似乎设置的不合理。
-——-。
“频率”:
默认设置是“自动”,LGO会自动为最终的解算选择最好的频率或者频率组合。
软件自动处理的理论背景如下:
由于L1和L2频率不同,在电离层中产生的信号延迟也不同,利用这两种频率的线形组合可以计算消除电离层影响。
然而,L3的解算也同样破坏了整周模糊度。
当模糊度还未固定时,采用浮点解计算。
对于长基线来说(例如,长度大于80M),使用浮点解是不可靠的(除非模糊度值固定)。
如果观测时间足够长,则根据系统说明,L3浮点解是足够准确的。
如果可以事先解算L1和L2的模糊度,在无电离层影响的线形组合中采用L1和L2的整周模糊度进行第二次处理。
在使用固定模糊度时可以消除电离层扰动。
在可以解算模糊度但无法消除电离层影响时(如,大于15M的基线)通常更优先采用这种策略。
对于短基线来说,使用无电离层影响的线形组合会增加噪声,反而不好。
最好采用标准的L1+L2解算。
在自动频率下,双频数据基线长度超过15KM,使用L3(消除电离层)解算,根据情况可以有L3浮点解和L3固定解。
如果基线长度小于15KM,将处理L1+L2。
LGO的这一点和规范是一致的,或许是规范参考这个而制定的。
就是基线长度小于15KM无条件必须是固定解,不然必须补测。
选择L1或者L2将强制使用特定的一种频率计算一个解。
选择L1+L2将强制使用L1和L2进行计算,而不再限制基线的长度。
似乎在长于15KM的基线,可以用L1+L2弄出模糊度,但是又没有办法消除电离层影响的时候,这样设置是不合理的。
而应当使用L3。
选择L3使系统不限制基线长度使用L3解。
“模糊度固定到:
”:
这个数值规定了解算模糊度的最长的基线距离,默认80KM,可以设置更高。
在这里,LEICA技术人员似乎转圈子了,如果频率是自动,那么距离小于15KM没有问题,必须是固定解。
长度超过15KM的基线将使用L3解,距离再长的,会出现L3浮点解,他们又说长度较长的基线的模糊度固定是没有意义的,对于长基线,如果保证了观测时间够长,L3浮点解是没有问题的。
L3浮点解足以满足系统的标称精度。
那为何他们还要设置成80KM呢?
或许是一个经验值吧。
或许浮点更好,在环路的检验中可以看出来。
“采样率”:
可以有1234
56101215203060秒,直接设置成全部使用就可以了。
“对流层模型”:
对流层是高度约30KM的大气部分,它可能导致电磁波的传播延迟。
为了计算该延迟必须知道对流层的折射因子影响。
LGO提供如下的模型:
Hopfied模型、SimplifiedHopfield模型、Essen&
Froome模型、无对流层模型、计算模型。
使用不同的模型所得到的结果相差很小(几个mm)。
建议在特定的区域采用本地所使用的模型,如果不熟悉可以使用系统的缺省设置Hopfied模型。
无对流层模型不应用任何改正,在实际的使用中一般不使用。
在长基线或者是基线高差较大的情况,可以选择计算的模型。
“电离层模型”:
电离层是围绕地区周围海拔100-1000KM之间的一层稀薄的带电荷气体(等离子体),它能导致信号延迟,有时可达几十米。
如果需要刻意的求出模糊度,选择合适的电离层模型十分重要。
可用的模型:
自动、计算的
 升级会员
升级会员 