机械人学蔡自兴课后习题答案Word文档格式.docx
《机械人学蔡自兴课后习题答案Word文档格式.docx》由会员分享,可在线阅读,更多相关《机械人学蔡自兴课后习题答案Word文档格式.docx(13页珍藏版)》请在冰豆网上搜索。
其中。
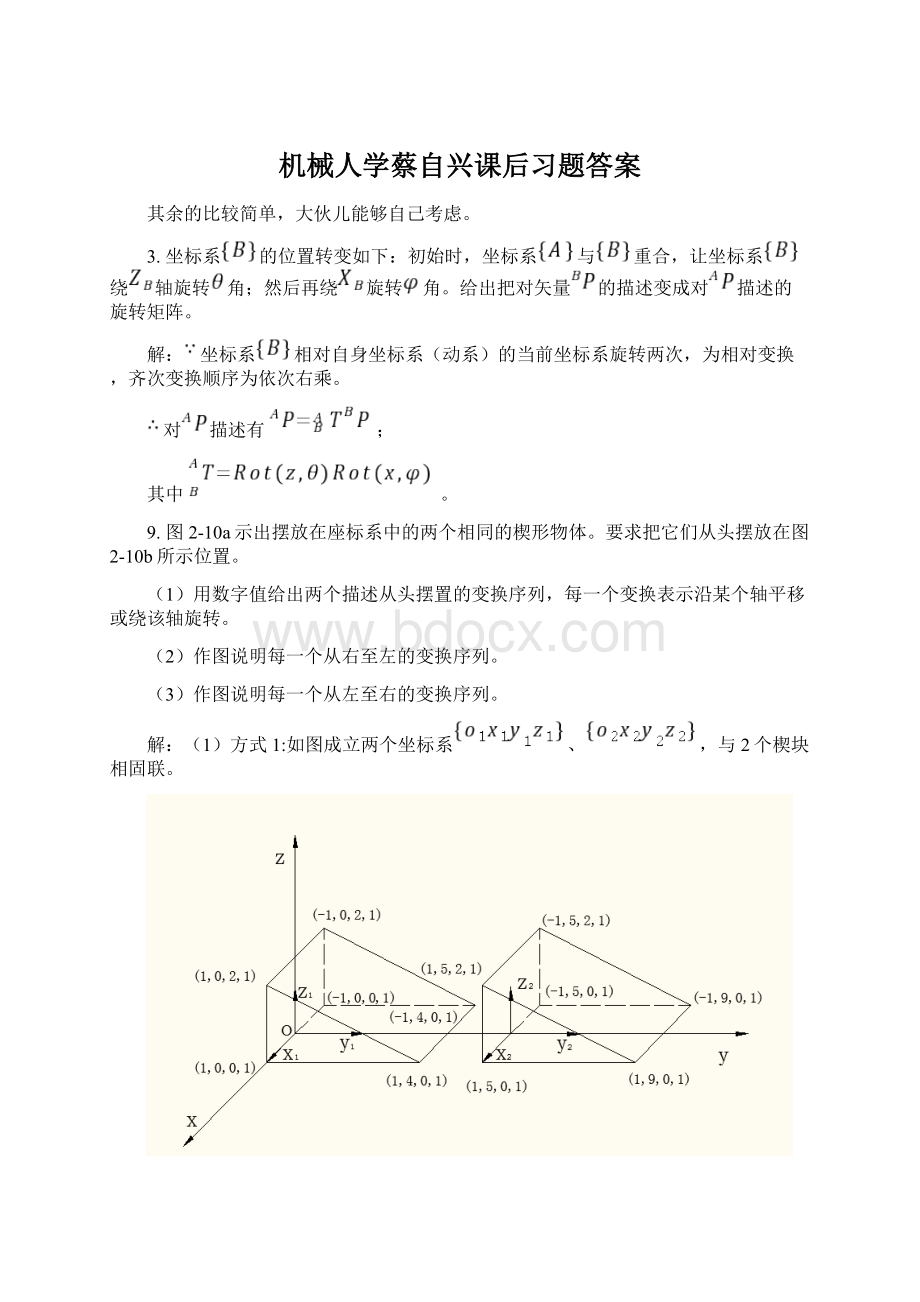
9.图2-10a示出摆放在座标系中的两个相同的楔形物体。
要求把它们从头摆放在图2-10b所示位置。
(1)用数字值给出两个描述从头摆置的变换序列,每一个变换表示沿某个轴平移或绕该轴旋转。
(2)作图说明每一个从右至左的变换序列。
(3)作图说明每一个从左至右的变换序列。
(1)方式1:
如图成立两个坐标系、,与2个楔块相固联。
图1:
楔块坐标系成立(方式1)
对楔块1进行的变换矩阵为:
;
对楔块2进行的变换矩阵为:
其中;
因此:
对楔块2的变换步骤:
1绕自身坐标系X轴旋转;
2绕新形成的坐标系的Z轴旋转;
3绕定系的Z轴旋转;
4沿定系的各轴平移。
方式2:
如图成立两个坐标系、与参考坐标系重合,两坐标系与2个楔块相固联。
楔块坐标系成立(方式2)
。
备注:
当做立的相对坐标系位置不同时,抵达理想位置的变换矩阵不同。
(2)、(3)略。
2.图3-11给出一个3自由度机械手的机构。
轴1和轴2垂直。
试求其运动方程式。
方式1建模:
如图3成立各连杆的坐标系。
图3:
机械手的坐标系成立
依照所建坐标系取得机械手的连杆参数,见表1。
表1:
机械手的连杆参数
该3自由度机械手的变换矩阵:
;
方式二进行建模:
坐标系的成立如图4所示。
图4:
依照所建坐标系取得机械手的连杆参数,见表2。
表2:
;
3.图3-12所示3自由度机械手,其关节1与关节2相交,而关节2与关节3平行。
图中所示关节均处于零位。
各关节转角的正向均由箭头示出。
指定本机械手各连杆的坐标系,然后求各变换矩阵,和。
关于结尾执行器而言,因为单独指定了结尾执行器的坐标系,则要确信结尾执行器与最后一个坐标系之间的变换关系。
依照方式1进行各连杆的坐标系成立,成立方式见图5。
图5:
连杆3的坐标系与结尾执行器的坐标系相重合。
机械手的D-H参数值见表3。
表3:
注:
关节变量。
将表3中的参数带入取得各变换矩阵别离为:
方式2建模:
依照方式2进行各连杆的坐标系成立,成立方式见图6。
图6:
3自由度机械手的D-H参数值见表4。
表4:
将表4中的参数带入取得各变换矩阵别离为:
1.已知坐标系对基座标系的变换为:
关于基座标系的微分平移分量别离为沿X轴移动,沿Y轴移动0,沿Z轴移动1;
微分旋转分量别离为,和0。
(1)求相应的微分变换;
(2)求对应于坐标系的等效微分平移与旋转。
(1)对基座标系的微分平移:
对基座标系的微分旋转:
相应的微分变换:
(2)由相对变换可知、、、,
对应于坐标系的等效微分平移:
微分旋转:
。
2.试求图所示的三自由度机械手的雅可比矩阵,所用坐标系位于夹手结尾上,其姿态与第三关节的姿态一样。
解:
设第3个连杆长度为。
1)利用方式1建模,结尾执行器的坐标系与连杆3的坐标系重合,利用微分变换法。
图7:
表5:
D-H参数表
由上式求得雅可比矩阵:
2)利用方式2建模,利用微分变换法。
图8:
表6:
 升级会员
升级会员 