计算机软件及应用FANUCO加工中心编程说明书文档格式.docx
《计算机软件及应用FANUCO加工中心编程说明书文档格式.docx》由会员分享,可在线阅读,更多相关《计算机软件及应用FANUCO加工中心编程说明书文档格式.docx(74页珍藏版)》请在冰豆网上搜索。
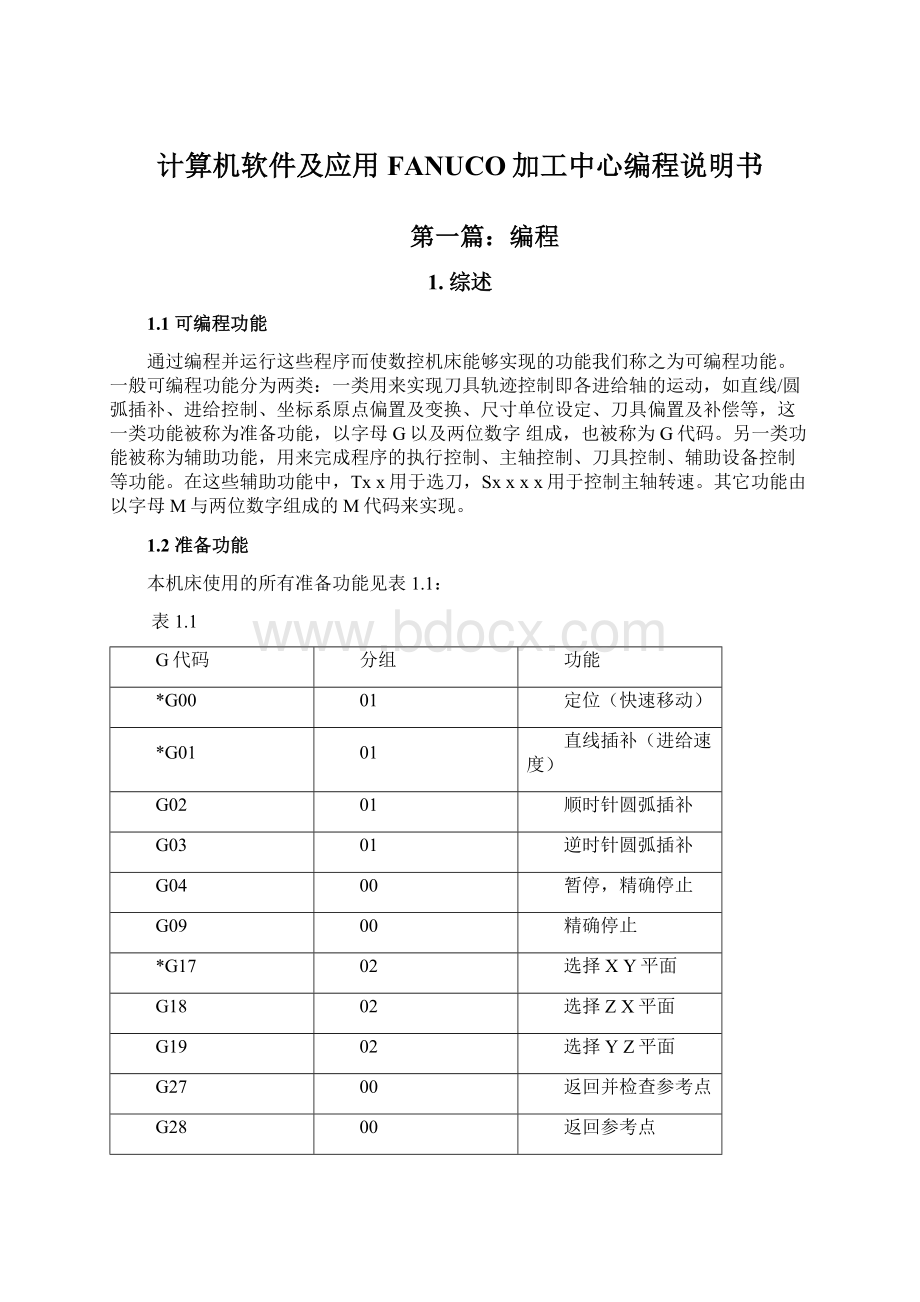
00
暂停,精确停止
G09
精确停止
*G17
02
选择XY平面
G18
选择ZX平面
G19
选择YZ平面
G27
返回并检查参考点
G28
返回参考点
G29
从参考点返回
G30
返回第二参考点
*G40
07
取消刀具半径补偿
G41
左侧刀具半径补偿
G42
右侧刀具半径补偿
G43
08
刀具长度补偿+
G44
刀具长度补偿-
*G49
取消刀具长度补偿
G52
设置局部坐标系
G53
选择机床坐标系
*G54
14
选用1号工件坐标系
G55
选用2号工件坐标系
G56
选用3号工件坐标系
G57
选用4号工件坐标系
G58
选用5号工件坐标系
G59
选用6号工件坐标系
G60
单一方向定位
G61
15
精确停止方式
*G64
切削方式
G65
宏程序调用
G66
12
模态宏程序调用
*G67
模态宏程序调用取消
G73
09
深孔钻削固定循环
G74
反螺纹攻丝固定循环
G76
精镗固定循环
*G80
取消固定循环
G81
钻削固定循环
G82
G83
G84
攻丝固定循环
G85
镗削固定循环
G86
G87
反镗固定循环
G88
G89
*G90
03
绝对值指令方式
*G91
增量值指令方式
G92
工件零点设定
*G98
10
固定循环返回初始点
G99
固定循环返回R点
从表1.1中我们可以看到,G代码被分为了不同的组,这是由于大多数的G代码是模态的,所谓模态G代码,是指这些G代码不只在当前的程序段中起作用,而且在以后的程序段中一直起作用,直到程序中出现另一个同组的G代码为止,同组的模态G代码控制同一个目标但起不同的作用,它们之间是不相容的。
00组的G代码是非模态的,这些G代码只在它们所在的程序段中起作用。
标有*号的G代码是上电时的初始状态。
对于G01和G00、G90和G91上电时的初始状态由参数决定。
如果程序中出现了未列在上表中的G代码,CNC会显示10号报警。
同一程序段中可以有几个G代码出现,但当两个或两个以上的同组G代码出现时,最后出现的一个(同组的)G代码有效。
在固定循环模态下,任何一个01组的G代码都将使固定循环模态自动取消,成为G80模态。
1.3辅助功能
本机床用S代码来对主轴转速进行编程,用T代码来进行选刀编程,其它可编程辅助功能由M代码来实现,本机床可供用户使用的M代码列表如下(表1.2):
表1.2
M代码
功能
M00
程序停止
M01
条件程序停止
M02
程序结束
M03
主轴正转
M04
主轴反转
M05
主轴停止
M06
刀具交换
M08
冷却开
M09
冷却关
M18
主轴定向解除
M19
主轴定向
M29
刚性攻丝
M30
程序结束并返回程序头
M98
调用子程序
M99
子程序结束返回/重复执行
一般地,一个程序段中,M代码最多可以有一个。
2.插补功能
2.1快速定位(G00)
G00给定一个位置。
格式:
G00IP;
IP在本说明书中代表任意不超过三个进给轴地址的组合,当然,每个地址后面都会有一个数字作为赋给该地址的值,一般机床有三个或四个进给轴即X,Y,Z,A所以IP可以代表如X12.Y119.Z-37.或X287.3Z73.5A45.等等内容。
G00这条指令所作的就是使刀具以快速的速率移动到IP指定的位置,被指令的各轴之间的运动是互不相关的,也就是说刀具移动的轨迹不一定是一条直线。
G00指令下,快速倍率为100%时,各轴运动的速度:
X、Y、Z轴均为15m/min,该速度不受当前F值的控制。
当各运动轴到达运动终点并发出位置到达信号后,CNC认为该程序段已经结束,并转向执行下一程序段。
位置到达信号:
当运动轴到达的位置与指令位置之间的距离小于参数指定的到位宽度时,CNC认为该轴已到达指令位置,并发出一个相应信号即该轴的位置到达信号。
G00编程举例:
起始点位置为X-50,Y-75.;
指令G00X150.Y25.;
将使刀具走出下图所示轨迹(图2.1)。
图2.1
2.2直线插补(G01)
G01IP-F-;
G01指令使当前的插补模态成为直线插补模态,刀具从当前位置移动到IP指定的位置,其轨迹是一条直线,F-指定了刀具沿直线运动的速度,单位为mm/min(X、Y、Z轴)。
该指令是我们最常用的指令之一。
假设当前刀具所在点为X-50.Y-75.,则如下程序段
N1G01X150.Y25.F100;
N2X50.Y75.;
将使刀具走出如下图(图2.2)所示轨迹。
大家可以看到,程序段N2并没有指令G01,由于G01指令为模态指令,所以N1程序段中所指令的G01在N2程序段中继续有效,同样地,指令F100在N2段也继续有效,即刀具沿两段直线的运动速度都是100mm/min。
2.3圆弧插补(G02/G03)
下面所列的指令可以使刀具沿圆弧轨迹运动:
在X--Y平面
G17{G02/G03}X__Y__{(I__J__)/R__}F__;
在X--Z平面
G18{G02/G03}X__Z__{(I__K__)/R__}F__;
在Y--Z平面
G19{G02/G03}Y__Z__{(J__K__)/R__}F__;
序号
数据内容
指令
含义
1
平面选择
G17
指定X--Y平面上的圆弧插补
指定X--Z平面上的圆弧插补
指定Y--Z平面上的圆弧插补
2
圆弧方向
顺时针方向的圆弧插补
逆时针方向的圆弧插补
3
终点
位置
G90模态
X、Y、Z中的两轴指令
当前工件坐标系中终点位置的坐标值
G91模态
从起点到终点的距离有方向的
4
起点到圆心的距离
I、J、K中的两轴指令
从起点到圆心的距离有方向的
圆弧半径
R
5
进给率
F
沿圆弧运动的速度
在这里,我们所讲的圆弧的方向,对于X--Y平面来说,是由Z轴的正向往Z轴的负向看X--Y平面所看到的圆弧方向,同样,对于X--Z平面或Y--Z平面来说,观测的方向则应该是从Y轴或X轴的正向到Y轴或X轴的负向(适用于右手坐标系如下图所示)。
圆弧的终点由地址X、Y和Z来确定。
在G90模态,即绝对值模态下,地址X、Y、Z给出了圆弧终点在当前坐标系中的坐标值;
在G91模态,即增量值模态下,地址X、Y、Z给出的则是在各坐标轴方向上当前刀具所在点到终点的距离。
在X方向,地址I给定了当前刀具所在点到圆心的距离,在Y和Z方向,当前刀具所在点到圆心的距离分别由地址J和K来给定,I、J、K的值的符号由它们的方向来确定。
对一段圆弧进行编程,除了用给定终点位置和圆心位置的方法外,我们还可以用给定半径和终点位置的方法对一段圆弧进行编程,用地址R来给定半径值,替代给定圆心位置的地址。
R的值有正负之分,一个正的R值用来编程一段小于180度的圆弧,一个负的R值编程的则是一段大于180度的圆弧。
编程一个整圆只能使用给定圆心的方法。
3.进给功能
3.1进给速度
上一章,我们讲述了基本插补命令的用法以及一些相关指令,同时,也涉及到了一些与进给速度有关的一些知识,在本节中,我们将归纳性地讨论这些问题。
数控机床的进给一般地可以分为两类:
快速定位进给及切削进给。
快速定位进给在指令G00、手动快速移动以及固定循环时的快速进给和点位之间的运动时出现。
快速定位进给的速度是由机床参数给定的,并可由快速倍率开关加上100%、50%、25%及F0的倍率。
快速倍率开关在100%的位置时,快速定位进给的速度对于X、Y、Z三轴来说,都是15000mm/min。
快速倍率开关在F0的位置时,X、Y、Z三轴快速定位进给速度是2000mm/min。
快速定位进给时,参与进给的各轴之间的运动是互不相关的,分别以自己给定的速度运动,一般来说,刀具的轨迹是一条折线。
切削进给出现在G01、G02/03以及固定循环中的加工进给的情况下,切削进给的速度由地址F给定。
在加工程序中,F是一个模态的值,即在给定一个新的F值之前,原来编程的F值一直有效。
CNC系统刚刚通电时,F的值由549号参数给定,该参数在机床出厂时被设为100mm/min。
切削进给的速度是一个有方向的量,它的方向是刀具运动的方向,模(即速度的大小)为F的值。
参与进给的各轴之间是插补的关系,它们的运动的合成即是切削进给运动。
F的最大值由527号参数控制,该参数在机床出厂时被设为4000mm/min,如果编程的F值大于此值,实际的进给切削速度也将保持为4000mm/min。
切削进给的速度还可以由操作面板上的进给倍率开关来控制,实际的切削进给速度应该为F的给定值与倍率开关给定倍率的乘积。
3.2自动加减速控制
自动加减速控制作用于各轴运动的起动和停止的过程中,以减小冲击并使得起动和停止的过程平稳,为了同样的目的自动加减速控制也作用于进给速度变换的过程中。
对于不同的进给方式,NC使用了不同的加减速控制方式:
快速定位进给:
使用线性加减速控制,各轴的加减速时间常数由参数控制522~525号参数。
切削进给:
用指数加减速控制,加减速时间常数由530号参数控制。
手动进给:
使用指数加减速控制,各轴的加减速时间常数也由参数控制,参数号为601~604。
3.3切削方式(G64)
一般地,为了有一个好的切削条件,我们希望刀具在加工工件时要保持线速度的恒定,但我们知道自动加减速控制作用于每一段切削进给过程的开始和结束,那么在两个程序段之间的衔接处如何使刀具保持恒定的线速度呢?
在切削方式G64模态下,两个切削进给程序段之间的过渡是这样的:
在前一个运动接近指令位置并开始减速时,后一个运动开始加速,这样就可以在两个插补程序段之间
 升级会员
升级会员 