结构力学A在线作业和离线作业解答Word文档格式.docx
《结构力学A在线作业和离线作业解答Word文档格式.docx》由会员分享,可在线阅读,更多相关《结构力学A在线作业和离线作业解答Word文档格式.docx(39页珍藏版)》请在冰豆网上搜索。
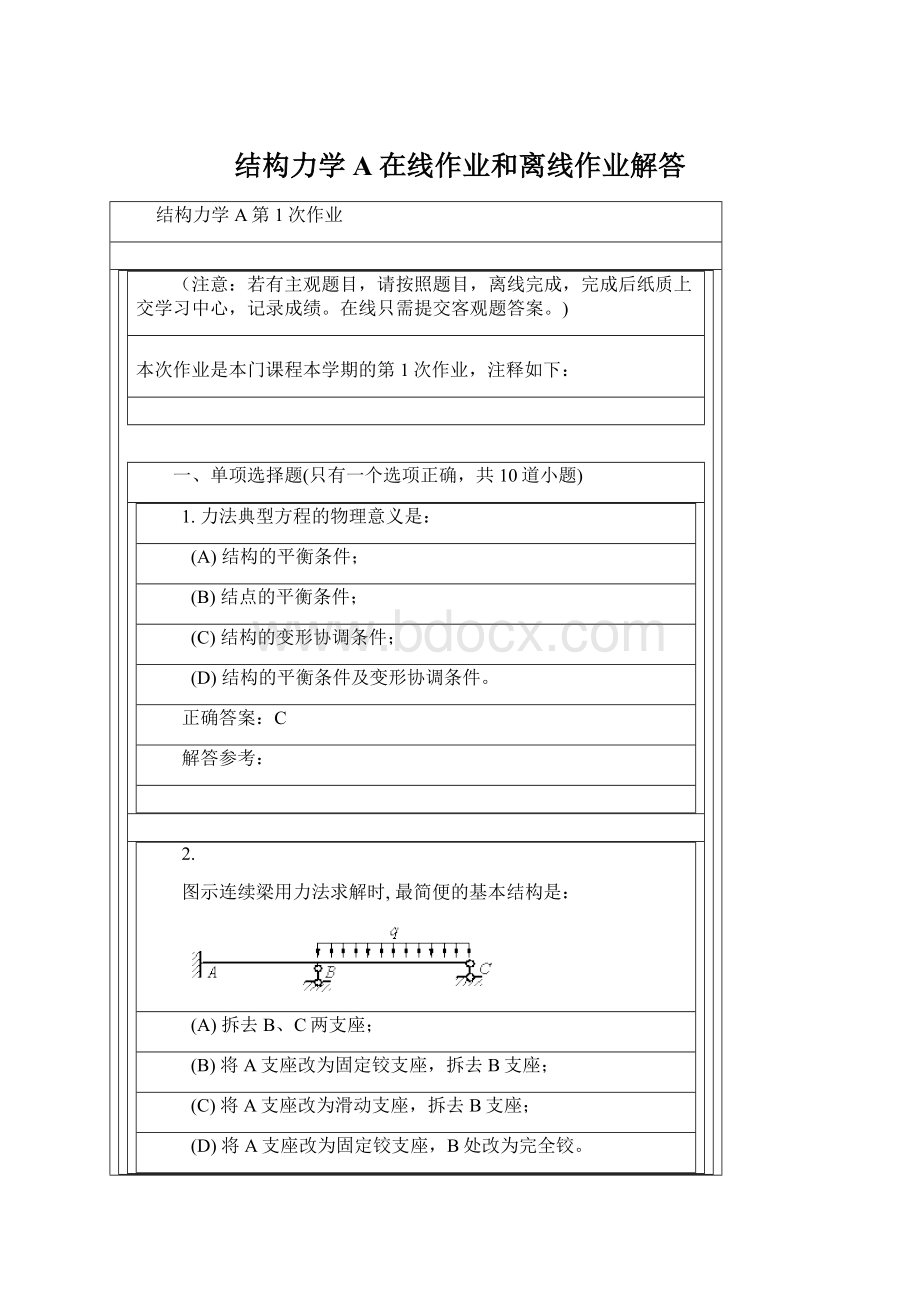
拆去B、C两支座;
将A支座改为固定铰支座,拆去B支座;
将A支座改为滑动支座,拆去B支座;
将A支座改为固定铰支座,B处改为完全铰。
D
3.在图示结构中,若减小拉杆的刚度EA,则梁内D截面弯矩如何?
不变
增大
减小
大于
B
4.
图A~D所示结构均可作为图示连续梁的力法基本结构,使得力法计算最为简便的基本结构是:
5.图示各结构在图示荷载作用下,不计轴向变形影响,产生弯矩的是
6.
位移法的基本未知数是:
结构上任一截面的角位移和线位移;
>
结构上所有截面的角位移和线位移;
结构上所有结点的角位移和线位移;
结构上所有结点的独立角位移和独立线位移。
7.位移法典型方程中的系数表示的是基本结构在
第i个结点位移产生的第j个附加约束中的反力(矩);
第j个结点位移等于单位位移时,产生的第j个附加约束中的反力(矩);
第j个结点位移产生的第i个附加约束中的反力(矩)。
第j个结点位移产生的第j个附加约束中的反力(矩)。
8.
欲使图示结点A的转角=0,应在结点A施加的力偶M=
5i
-5i
C.
9.
位移法的适用范围:
不能解静定结构;
只能解超静定结构;
只能解平面刚架;
可解任意结构。
10.
图示排架结构,横梁刚度为无穷大,各柱EI相同,则FN2=
FP;
FP/2;
0;
不确定(与abc的值有关)。
三、判断题(判断正误,共7道小题)
11.
超静定结构中多余约束或多余未知力的数目称为超静定次数。
说法正确
12.
图示结构中,去掉其中任意两根支座链杆后余下部分都可作为力法计算的基本体系。
说法错误
13.
在图示体系中,去掉其中任意两根支座链杆后,所余下部分都是几何不变的。
14.
位移法典型方程的物理含义是基本体系附加约束中的反力或反力矩等于零,实质上是原结构的平衡条件。
15.
图a所示结构,取图b为力法基本结构,则其力法方程为
16.
结
构
按
位
移
法
计
算
时
,
其
典
型
方
程
的
数
目
与
点
相
等
。
17.
欲使图示结构中的A点发生向右单位移动,应在A点施加的力
四、主观题(共8道小题)
18.
用力法作图示结构的M图,EI=常数。
参考答案:
建立力法方程:
绘单位弯矩图和荷载弯矩图,求系数和自由项,求解出
,即
由叠加原理作出最后弯矩图。
19.
用力法计算,并绘图示结构的M图。
EI=常数。
绘单位弯矩图和荷载弯矩图,求系数和自由项,求解出,即
20.
用位移法作图示结构M图,各杆线刚度均为i,各杆长为l
21.
已知图示结构在荷载作用下结点A产生之角位移
(逆时针方向),试作M图。
22.
图(a)所示结构,选取图(b)所示的力法基本结构计算时,其
23.
图示结构用位移法求解时典型方程的系数r22为
24.
图示排架结构,横梁刚度为无穷大,各柱EI相同,则FN2=
。
FP/2
25.
图
示
刚
架
,已
求
得
B
转
角
=0.717/
i
(
顺
针
)
C
水
平
=
7.579/
i(),
则
,=
-13.9;
-5.68
结构力学A第2次作业
本次作业是本门课程本学期的第2次作业,注释如下:
一、单项选择题(只有一个选项正确,共8道小题)
1.单元刚度方程是表示一个单元的下列两组量值之间的相互关系:
杆端力与结点外力;
杆端力与杆端位移;
杆端位移与结点位移;
结点外力与结点位移。
图示结构,用矩阵位移法计算时的未知量数目为:
9;
5;
10;
6。
3.单元刚度矩阵中元素的物理意义是:
当且仅当时引起的与相应的杆端力;
当时引起的与相应的杆端力;
当时引起的与相应的杆端力。
在图示整体坐标系中,单元的倾角是()
45°
-45°
135°
225°
5.
在图示整体坐标系中,单元的倾角是(
)
6.矩阵位移法中,结构的原始刚度方程是表示下列两组量值之间的相互关系:
杆端力与结点位移;
杆端力与结点力;
结点力与结点位移;
结点位移与杆端力。
7.结构的原始刚度矩阵名称中,“原始”两字是强调:
已进行位移边界条件的处理;
尚未进行位移边界条件的处理;
已进行力的边界条件的处理;
尚未进行力的边界条件的处理。
8.平面杆件结构用后处理法建立的原始刚度方程组,(
可求得全部结点位移;
可求得可动结点的位移;
可求得支座结点位移;
无法求得结点位移。
三、判断题(判断正误,共6道小题)
9.
用矩阵位移法计算连续梁时无需对单元刚度矩阵作坐标变换。
10.
结构原始刚度矩阵与结点位移编号方式无关。
在矩阵位移法中整体分析的实质是结点平衡。
矩阵位移法中,单元的刚度方程是表示结点力与杆端位移的转换关系。
图示连续梁,用矩阵位移法计算时的基本未知量数目为3。
单元刚度矩阵均具有对称性和奇异性。
用先处理法写出图示结构的结构刚度矩阵K,E=常数。
不计轴向变形影响。
试求图示结构原始刚度矩阵中的子块K22的4个元素。
已知各杆件在整体坐标系中的单元刚度矩阵为:
求图示结构的自由结点荷载列阵F
已用矩阵位移法求得图a所示结构单元③的杆端力(整体坐标)为
在矩阵位移法中,处理位移边界条件时有以下两种方法,即
和
,前一种方法的未知量数目比后一种方法的
先处理法;
后处理法;
少
或:
后处理法,先处理法,多
矩阵位移法中,单元的刚度方程是表示
与
的转换关系。
杆端力;
杆端位移
局部坐标系中自由单元刚度矩阵的特性有
、
奇异性;
对称性
结构原始刚度矩阵中,元素K45的物理意义就是
=1时,
所应有的数值。
;
在方向产生的力
结构力学A第3次作业
本次作业是本门课程本学期的第3次作业,注释如下:
一、单项选择题(只有一个选项正确,共9道小题)
1.静力荷载与动力荷载的主要区别在于前者:
不改变位置;
不改变方向;
 升级会员
升级会员 