PID功能块参数表Word文档格式.docx
《PID功能块参数表Word文档格式.docx》由会员分享,可在线阅读,更多相关《PID功能块参数表Word文档格式.docx(24页珍藏版)》请在冰豆网上搜索。
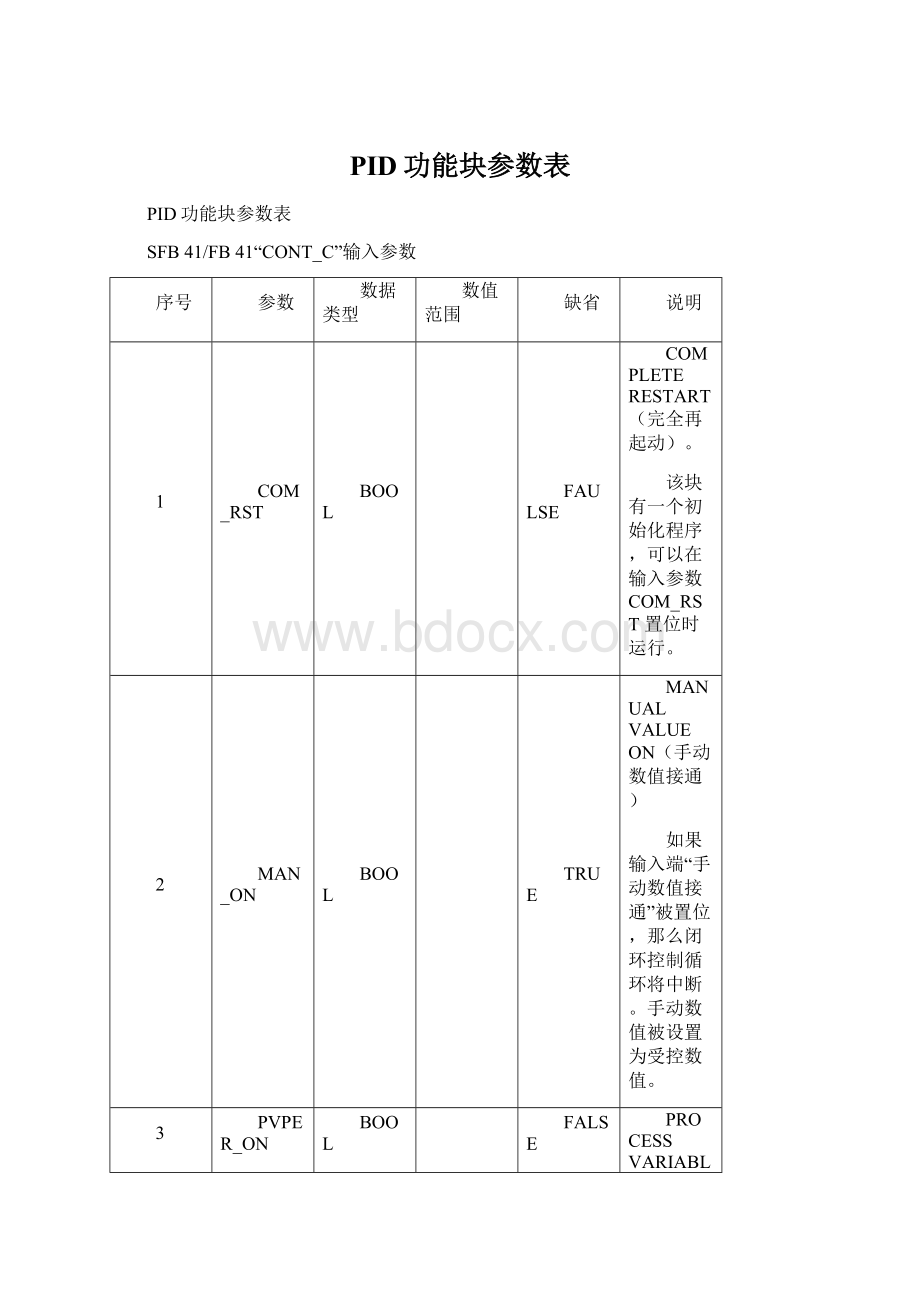
如果输入端“手动数值接通”被置位,那么闭环控制循环将中断。
手动数值被设置为受控数值。
3
PVPER_ON
FALSE
PROCESSVARIABLEPERIPHERY
ON/(过程变量外设接通)如果过程变量从I/O读取,输入“PV_PER”必须连接到外围设备,并且输入“PROCESSVARIABLEPERIPHERYON”必须置位。
4
P_SEL
PROPORTIONALACTIONON(比例分量接通)PID各分量在PID算法中可以分别激活或者取消。
当输入端“比例分量接通”被置位时,P分量被接通。
5
I_SEL
INTEGRALACTIONON(积分分量接通)PID各分量在PID算法中可以分别激活或者取消。
当输入端“积分分量接通”被置位时,I分量被接通。
6
INT_HOLD
INTEGRALACTIONHOLD(积分分量保持)积分器的输出被冻结。
为此,必须置
位输入“IntegralActionHold(积分操作保持)”。
7
I_ITL_ON
INITIALIZATIONOFTHEINTEGRAL
ACTION(积分分量初始化接通)积分器的输出可以被设置为输入“I_ITLVAL”。
为此,必须置位输入“积分操作的初始化”。
8
D_SEL
DERIVATIVEACTIONON(微分分量接通)
PID各分量在PID算法中可以分别激活或者取消。
当输入端“微分分量接通”被置位时,D分量被接通。
9
CYCLE
TIME
>
=1ms
T#1s
SAMPLETIME(采样时间)块调用之间的时间必须恒定。
“采样时间”输入规定了块调用之间的时间,应该与OB35设定时间保持一致。
10
SP_INT
REAL
-100.0至+100.0(%)或者物理值1
0.0
INTERNALSETPOINT(内部设定点)
“内部设定点”输入端用于确定设定值。
11
PV_IN
PROCESSVARIABLEIN(过程变量输入)
可以设置一个初始值到“过程变量输入”输入端或者连接一个浮点数格式的外部过程变量。
12
PV_PER
WORD
W#16#0000
PROCESSVARIABLEPERIPHERY(过程变量外设)外围设备的实际数值,通过I/O格式的过程变量被连接到“过程变量外围设备”输入端,连接到控制器
13
MAN
-100.0至+100.0(%)或者物理值2
MANUALVALUE(手动数值)“手动数值”输入端可以用于通过操作者接口功能设置一个手动数值。
14
GAIN
2.0
PROPORTIONALGAIN(比例增益)“比例增益”输入端可以设置控制器的比例增益系数。
15
TI
=CYCLE
T#20s
RESETTIME(复位时间)“复位时间”输入端确定了积分器的时间响应。
16
TD
T#10s
DERIVATIVETIME(微分时间)“微商时间”输入端确定了微商单元的时间响应。
17
TM_LAG
=(CYCLE/2)
T#2s
TIMELAGOFTHEDERIVATIVEACTION(微分分量的滞后时间)微商操作的算法包括一个时间滞后,可以被赋值给“微分分量的滞后时间”输入端上。
18
DEADB_W
=0.0(%)或者物理值1
DEADBANDWIDTH(死区宽度)死区用于存储错误。
“死区宽度”输入端确定了死区的容量大小。
19
LMN_HLM
LMN_LLM至100.0(%)或者物理值2
100.0
MANIPULATEDALUEHIGHLIMIT(受控数值的上限)受控数值必须设定有一个“上限”和一个“下限”。
“受控数值上限”输入端确定了“上极限”。
LMNR_HS
HIGHLIMITOFPOSITIONFEEDBACKSIGNAL(位置反馈信号上限)
“执行器在上限停”信号连接到“位置反馈信号上限”输入端。
LMNR_HS=TRUE表示执行器处于最大上限。
LMNR_LS
LOWLIMITOFPOSITIONFEEDBACKSIGNAL(位置反馈信号下限)
“执行器在下限停”信号连接到“位置反馈信号下限”输入端。
LMNR_LS=TRUE表示执行器处于最大下限。
LMNS_ON
MANUALACTUATINGSIGNALSON(手动执行信号接通)通过“手动执行信号接通”执行信号处理切换为手动模式。
LMNUP
ACTUATINGSIGNALSUP(执行信号上升)通过手动执行信号,输出信号QLMNUP”在“执行信号上升沿”输入被置位。
LMNDN
ACTUATINGSIGNALSDOWN(执行信号下降)通过手动执行信号,输出信号“QLMNDN”在“执行信号下降沿”输入被置位。
PROCESSVARIABLEPERIPHERYON(过程变量外设接通)如果从I/O读取过程变量,输入端“PV_PER”必须连接到外围设备,并且输入端“PROCESSVARIABLEERIPHERYON”必须置位。
=1ms
SAMPLINGTIME(采样时间)块调用之间的时间必须恒定。
“采样时间”输入端规定了块调用之间的时间。
-100.0至+100.0(%)或物理值1
INTERNALSETPOINT(内部设定值)
“内部设定值”输入用于确定一个设定值。
PROCESSVARIABLEIN(过程变量输入)可以设置一个初始值到“过程变量输入”输入端或者连接一个浮点数格式的外部过程变量。
PROCESSVARIABLEPERIPHERY(过程变量外设)I/O格式的过程变量被连接到调节器的“过程变量外围设备”输入端。
PROPORTIONALGAIN(比例增益)
“比例增益”输入端设置控制器的增益。
0.0至+100.0(%)或物理值1
1.0
DEADBANDWIDTH(死区宽度)死区用于误差。
“死区宽度”用于确定死区的大小。
PV_FAC
PROCESSVARIABLEFACTOR(过程变量系数)“过程变量系数”输入用于和过程变量相乘。
该输入可以用于匹配过程变量的范围。
PV_OFF
PROCESSVARIABLEOFFSET(过程变量偏移量)“过程变量偏移”输入端与过程变量相加。
该输入端用于匹配过程变量的范围。
PULSE_TM
T#3s
MINIMUMPULSETIME(最小脉冲时间)
最小脉冲宽度可以使用参数“最小脉冲时间”赋值。
BREAK_TM
MINIMUMBREAKTIME(最小间隔时间)
最小脉冲间隔时间可以使用参数“最小间隔时间”赋值。
MTR_TM
T#30s
MOTORMANIPULATEDVALUE(电动执行时间)执行机构从一个限幅位置移动到另
一个限幅位置所需的时间,可以在参数“电动执行时间”参数中输入。
20
DISV
-100.0至+100.0(%)或物理值2
DISTURBANCEVARIABLE(干扰变量)对于前馈控制,干扰变量连接到输入端“干扰变量”。
1)“设定值通道”和“过程变量通道”中的参数,应该有相同的单位;
2)受控量通道中的参数应该有相同的单位。
SFB42/FB42“CONT_S”输出参数
QLMNUP
ACTUATINGSIGNALUP(执行信号上升)如果输出端“执行信号上升”被置位,那么执行阀是打开的。
QLMNDN
ACTUATINGSIGNALDOWN(执行信号下降)如果输出端“执行信号下降”被置位,那么执行阀是打开的。
PV
PROCESSVARIABLE(过程变量)有效的过程变量是在“过程变量”输出端输出。
ER
ERRORSIGNAL(负偏差信号)
有效的负偏差数值在“负偏差信号”输出端输出。
SFB43/FB43“PULSEGEN”输入参数
INV
-100.0
...100.0(%)
INPUTVARIABLE(输入变量)模拟受控量连接到输入参数“输入变量”•对于RATIOFAC<
1的三级控制•对于RATIOFAC>
1的三级控制•对于双极二级控制
•对于多极二级控制
PER_TM
=20*CYCLE
PERIODTIME(周期时间)脉冲宽度调制的恒定周期可以使用该输入参数输入。
这相当于“CONT_C”控制器的采样时间。
脉冲发生器的采样时间和“CONT_C”控制器的采样时间之比决定了脉冲宽度调制的精度。
P_B_TM
=CYCLE
T#0ms
MINIMUMPULSE/BREAKTIME(最小脉冲/间隔时间)最小脉冲时间或最小中断时间可以使用输入参数“最小脉冲/间隔时间”赋值。
RATIOFAC
0.1...10.0
RATIOFACTOR(比例系数)输入参数“比例系数”可以用于改变正脉冲宽度和负脉冲宽度之比。
例如,在热处理中,
 升级会员
升级会员 