双轴位置控制系统的设计.docx
《双轴位置控制系统的设计.docx》由会员分享,可在线阅读,更多相关《双轴位置控制系统的设计.docx(27页珍藏版)》请在冰豆网上搜索。
双轴位置控制系统的设计
双轴位置控制系统的设计
1、设计任务与目的
1.1了解系统的机械结构,控制要求;
1.2掌握气动控制技术的要求;
1.3熟练掌握step7micro/win中PTO指令。
2、设计要求
2.1根据实验要求画出电气原理图
通过读电气控制原理图,了解电气控制过程,明白电气回路的工作原理,经过实际操作,提高电气故障分析与检修能力。
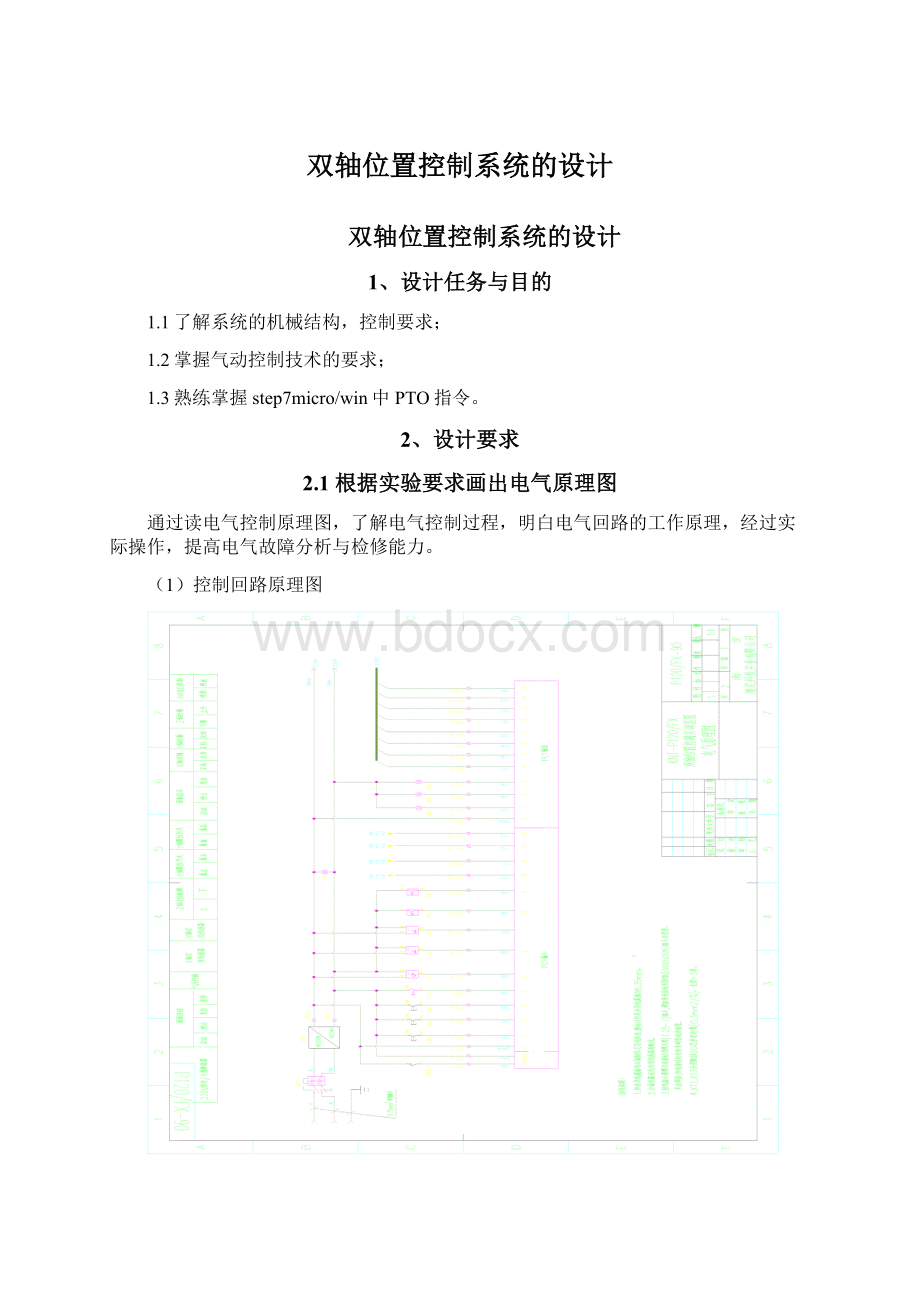
(1)控制回路原理图
控制回路原理图
主回路原理图
2.2查找所使用的电器元件型号、功能和使用方法
本实验设备由机械运动、电气控制回路、气动控制回路与铝型材板四部分组成,将机械、电气及气动有机组合在一起,实现点位控制的系统。
2.2.1机械运动部分
主要由X轴、Y轴的滚珠丝杠机构及Z轴的升降(气缸)与工件抓取机构所组成。
1)滚珠丝杠机构
滚珠丝杠副
滚珠丝杠副电动执行机构,主要由前后支撑块、电机及支架、联轴器、导柱、滑座、滚珠丝杠副等器件构成。
如图1、图2所示。
图1滚珠丝杠副后俯视图
图2滚珠丝杠副后正视与局部剖视图
滚珠丝杠副机构的运动原理是电机转动时,电机转动轴与滚珠丝杠通过弹性联轴器连接,因此,滚珠丝杠与电机同步转动,而滚珠丝杠副的位置是固定的,装在滚珠丝杠副上的螺母块与滑块也是固定在一起的,那么随着滚珠丝杠副的转动,螺母块拖着滑块沿着两根导柱做直线运动,并随着电机的正反转,滑块做左右直线运动。
(丝杆的螺距为5mm)
另外滚珠丝杠副机构的极限位置皆设置了限位开关,可以有效保护由于故障等原因,使滚珠丝杠副机构的运动装置超程而造成的机械或电气设备的损坏,造成不必要的损失。
Z轴通过工厂自动化常用的气动双作用气缸和气动真空吸盘来控制取放工件。
Z轴方向的运动通过一个双作用气缸来实现。
真空吸盘安装在双作用气缸的前端,通过电磁阀来控制气路通断,从来控制Z轴的升降和真空吸盘来吸取释放工件。
2.2.2电气部分
双轴位置控制设备的电气部分主要由小型断路器、开关电源、继电器、直流电机、控制盒及接线端子等器件所组成。
1)空气开关
外接电源接入设备由总电源开关控制总电源的通断。
2)开关电源
由总电源开关另外一路接入交流220V电源供给开关电源。
空气开关开关电源
3)控制箱
控制立体库运动的操作控制盒
START——开始(启动)
MANUAL——自动/手动切换
Z-AXIS-——Z轴升降
STOP——停止
FUNCION——功能键
HAND——吸盘吸取/放开
RESET——复位
EMERGENCYSTOP——紧急停止
POWER——电源指示灯
2.2.3气动回路
双轴位置控制设备的气动部分主要由过滤减压阀、真空发生器、电磁阀组、标准气缸、真空吸盘、节流阀及气管等所组成。
1)过滤减压阀
气压传动,往往使用空气压缩机将空气压缩后存储至专用的存储单元,我通常称之为气源。
空气中难免会有油污、水蒸气等等一些杂质在空气压缩的过程被吸入压缩机当中混合在气源中。
为了设备更好的发挥性能,我们在气源接入设备之前安装了空气过滤器,保证较清洁的空气接入设备当中。
如图2-12所示空气过滤器。
2)电磁阀
由中间继电器的常开点单独控制电磁阀的通断,使Z轴气缸升降、吸盘吸取或释放工件。
3)真空发生器
真空发生器:
真空发生器产生真空的原理和传统真空泵是不一样的。
它是让压缩空气在泵体内形成高速气流,大家知道,气体的流动速度越高,当地的气体压力就越低(从柏努利方程可以得出),因此就具有越强的抽吸能力。
真空发生器就是利用这种原理制成的。
正因为如此,在同等真空抽气量的情况下,真空发生器体积小,基本不用维护,真正的无油,是一种既可靠效率又高的真空泵。
真空发生器分单级真空发生器和多级真空发生器两类,在消耗相同压缩空气的条件下,多级真空发生器在标准大气下的真空抽气量一般是单级真空发生器的好几倍,因此,多级真空发生器是真正高效率的真空泵。
真空发生器的使用环境要求很简单,只要有压缩空气源,就可以使用真空发生器。
图2-14所示。
2.2.4画出气动原理图
通过读气动原理图,了解气动回路各个器件的功能和作用,清楚气动回路的基本组成,掌握双轴位置控制系统气动回路的工作原理,如图所示:
2.3控制要求
2.3.1手动操作
控制吸盘完成吸取和释放动作,以达到平面抓取。
提升、搬运、下降、释放工作目的。
2.3.2自动操作
在格盘上将棋子放在如图位置。
3、硬件设计部分
3.1结合电气部分的组装实验内容和随机配套的电气原理图完成通电调试实验
1)按照电气原理图和电气部分组装实验的说明检查设备的接线是否正确。
2)将开关电源上的电压选择开关拨至230VAC档。
3)拔下电磁阀线圈电源的插头。
4)接入电源。
5)用万用表测量电源电压是否符合设备要求(通常AV220V左右)。
6)闭合总开关。
7)再用万用表测量开关电源输出的电压是否符合设备要求(通常DC24V)。
8)再测量电磁阀线圈电源电压是否符合设备要求(通常DC24V)。
9)确定以上接线及电源电压符合设备要求后。
切断电源。
10)将之前拔出的电磁阀线圈电源线插回原处。
11)重新通电。
12)通电调试完成,依据设备功能要求可以调试其他动作。
4、软件设计部分
5、调试过程与结果
打开空气开关接通整个试验台电源,打开STEP7-MicroWIN软件,设置通信并连接S7-200,连接成功后使用STEP7-MicroWIN软件编译程序无误后下载到PLC中。
经查阅资料得知步进电机57BYG096的脉冲步进角为1.8°,所以要使电机转一圈需要200脉冲,除此之外脉冲发生器的拨码开关选择细分率为16,则需要200*16=3200个脉冲可以使步进电机转一圈。
丝杆螺距为5mm,则步进电机转一圈实验装置产生5mm位移,通过STEP7-MicroWIN软件中的PTO指令,进行设置并选择单速连续旋转包络进行控制,同时设置好每秒给的脉冲数可以控制速度,通过ADV子程序分别控制电机X轴Y轴停止时间则可以控制设备移位距离。
手动操作:
将选择开关拨到单步,按下启动按钮,设备正常启动,按下相应按钮可以正常实现相应功能。
自动操作:
将选择开关拨到自动,按下启动按钮,设备开始复位,复位完成后,按顺序依次完成实验要求中的棋子摆放。
完成最后一个棋子摆放后进行复位。
 升级会员
升级会员 