智能翻转式攀爬机器人文档格式.docx
《智能翻转式攀爬机器人文档格式.docx》由会员分享,可在线阅读,更多相关《智能翻转式攀爬机器人文档格式.docx(8页珍藏版)》请在冰豆网上搜索。
史冬岩;
石先杰;
邓波;
陆玉婷;
李芳
发明名称
智能翻转式攀爬机器人
摘要
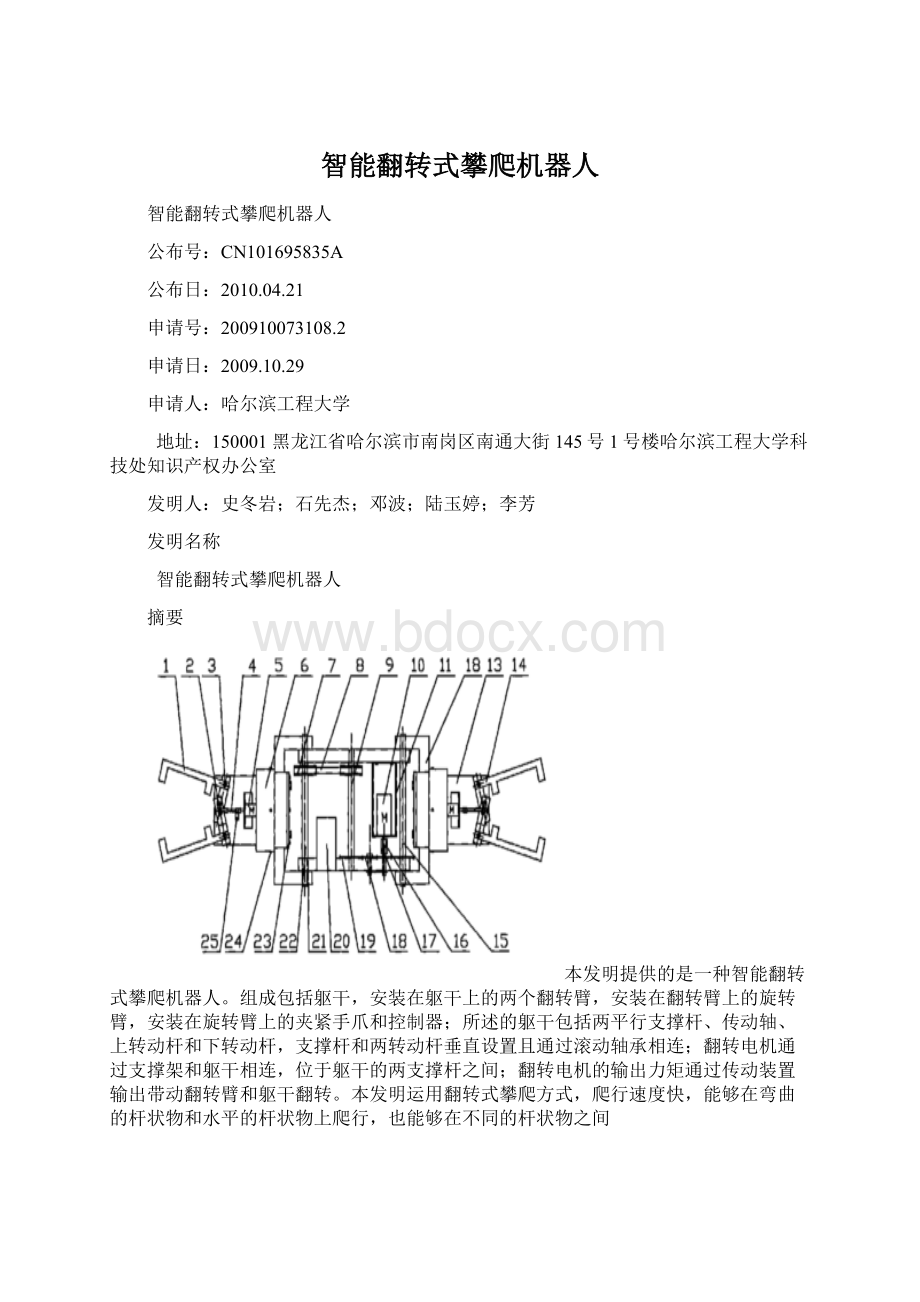
本发明提供的是一种智能翻转式攀爬机器人。
组成包括躯干,安装在躯干上的两个翻转臂,安装在翻转臂上的旋转臂,安装在旋转臂上的夹紧手爪和控制器;
所述的躯干包括两平行支撑杆、传动轴、上转动杆和下转动杆,支撑杆和两转动杆垂直设置且通过滚动轴承相连;
翻转电机通过支撑架和躯干相连,位于躯干的两支撑杆之间;
翻转电机的输出力矩通过传动装置输出带动翻转臂和躯干翻转。
本发明运用翻转式攀爬方式,爬行速度快,能够在弯曲的杆状物和水平的杆状物上爬行,也能够在不同的杆状物之间
进行迁移爬行;
通过遥控装置和智能控制,爬行方式灵活,智能化程度高;
通过压力传感器反馈回夹力使爬行更加可靠。
权利要求书
1.一种智能翻转式攀爬机器人,其特征是:
所述的躯干包括两平行支撑杆、传动轴、上转动杆和下转动杆,支撑杆和两转动杆垂直设置且通过滚动轴承相
连;
2.根据权利要求l所述的一种智能翻转式攀爬机器人,其特征是:
所述传动装置包括电机输出轴齿轮、换向齿轮、下转动杆齿轮、传动轴齿轮、第一带轮、第二带轮和同步齿形带,翻转电机通过联轴器与电机输出轴齿轮相连,下转动杆齿轮安装在下转动杆上,换向齿
轮通过换向齿轮支承轴安装在支撑杆上,传动轴齿轮安装在传动轴的一端,电机输出轴齿轮与换向齿轮和下转动杆齿轮啮合,换向齿轮与传动轴齿轮啮合,第一带轮安装在传动轴的另一端,第二带轮固定在上转动杆上,两带轮通过同步齿形带连接。
3.根据权利要求l或2所述的一种智能翻转式攀爬机器人,其特征是:
所述翻转臂的组成包括翻转支杆、翻转基体、后端盖、旋转电机、推力轴承和止动套;
所述旋转臂的组成包括旋转基体、手爪驱动电机、丝杠、限位开关、推杆螺母和手爪转动轴;
翻转支杆一端和转动杆固结,翻转支杆另一端与翻转基体固结,止动套位于翻转基体外端、由上下两件套体组成,止动套固定在翻转基体上,旋转电机位于翻转机体内,旋转电机前端有推力轴承,旋转电机输出轴位于推力轴承内,输出轴前端与旋转手臂固结,旋转基体上有导向槽,推杆螺母下端位于导向槽内,推杆螺母上端有螺纹孔与丝杠螺纹连接,限位开关位于丝杠行程末端,手爪驱动电机固定在旋转基体上,电机输出轴与丝杠通过联轴器连接。
4.根据权利要求l或2所述的一种智能翻转式攀爬机器人,其特征是:
所述夹紧手爪由爪体、压力传感器、橡胶层、光电管组成,压力传感器位于爪体内侧、与爪体粘接,橡胶层粘贴在压力传感器上,爪体后部设有光电管,最后端有导向槽,推杆螺母位于导向槽内,爪
体能够绕位于旋转基体上的手爪转动轴转动。
5.根据权利要求3所述的一种智能翻转式攀爬机器人,其特征是:
所述夹紧手爪由爪体、压力传感器、橡胶层、光电管组成,压力传感器位于爪体内侧、与爪体粘接,橡胶层粘贴在压力传感器上,爪体后部设有光电管,最后端有导向槽,推杆螺母位于导向槽内,爪体能够绕位于旋转基体上的手爪转动轴转动。
6.根据权利要求l或2所述的一种智能翻转式攀爬机器人,其特征是:
所述控制器包括控制模块和遥控模块,遥控模块包括无线发射模块和无线接收模块,控制器粘接在躯干上。
7.根据权利要求3所述的一种智能翻转式攀爬机器人,其特征是:
8.根据权利要求4所述的一种智能翻转式攀爬机器人,其特征是:
9.根据权利要求5所述的一种智能翻转式攀爬机器人,其特征是:
基于TRIZ的攀爬机器人的创新设计
机器人是一种典型的机械、电子、控制结合的产物。
它是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。
在国内外先后出现地面爬行机器人、壁面爬行机器人和球面爬行机器人之后,管道和绳缆爬行机器人也受到了广泛重视,登上了历史舞台。
现代生活中,高空作业不断增加,如路灯杆、悬索桥钢索、杆状城市建筑的清洗、油漆、喷涂料、检查、维修、电力系统架设电缆、瓷瓶清洁以及一些危险管道的检修等。
为了降低工人高处作业的危险程度,提供可靠的作业工具及物资运送方式,进行危险环境的管道检修尤其是在发生火灾、地震、核泄漏等突发性自然灾害和人为不慎引起的突发性灾害后危险管道的检修等实际需要,研制一种可实现各种管道及任意角度杆状物攀爬的攀爬机器人是十分必要的。
它不仅可以辅助工人完成作业任务,还可以通过远程监控,实现环境监测、军事侦察等任务。
爬树、爬杆及爬管道类机器人与一般在地面上移动的机构有着很大的不同,从水平爬行“跃迁”到竖直方向爬行,首先要克服重力的作用,而其与垂直壁面的爬行又有着较大的差别,它不能采用吸附式或粘性物质提供抓紧力,只能依靠柱杆的表面提供升力。
杆状物攀爬机器人一直以来就是国内外研究的热点和焦点,国内外现有的杆状物攀爬机器人主要有电动机械式、电动液压式和气动蠕动式三种。
电动机械式爬行器利用曲柄滑块及连杆结构,采用螺旋线运动轨迹,可以使爬行器作业高速化,加快循环时间,使爬升和夹紧机构能够同步动作,从结构和运动方式上较好地解决了爬行器的自锁问题,然而蜗杆传动在啮合处有相对滑动,当滑动速度很大,工作条件不够好时,会产生较严重的摩擦与磨损,从而引起发热过大,使润滑情况恶化,适用于爬行速度低、负载小、杆件表面变化较小的清况。
电动液压式爬行器采用电机直接驱动,可以在任意倾斜角的杆件上爬行,爬升速度高、运行平稳,压紧调节装置,使爬行器能够适应杆件表面直径的变化,而且爬行器能提供较大的负载能力,适用于负载大、杆件表面变化较大的情况,但要求攀爬对象是由较大摩擦系数的材料制成。
气动蠕动式爬行器采用气压驱动,由上体、下体、移动机构和气动系统组成,气动装置结构简单、轻便、使用安全。
气动蠕动式爬行器对于杆件直径变化较大、表面恶劣的杆件具确较好的适应性;
然而由于空气有压缩性,气缸的动作速度易受负载的变化而变化,其低速稳定性较差,其负载能力受到机器人本身体积、重量的限制,适用于中等负载强度的应用。
国外有代表性的有宾夕法尼亚州大学研制的Rise系列攀爬机器人该机器人是一款四足机器人,除了能够在地面上奔跑外,还能够爬树.其脚部位置使用了外利手术针作为材料,这样就可以在垂直物体上进行移动国内比较典型的有吉林大学机械学院研究开发的仿尺蟆步态的爬杆机器人。
该机器人主要由头部、尾部与躯干3部分组成。
其中头部和尾部分别为一套单向自锁机构,躯干则为曲柄摇杆机构,作为整个机器人的动力源。
通过各个部分的协调配合来完成爬杆机器人的伸缩,进而实现爬杆机器人的爬杆动作上海交通大学研发了一种新型的、在垂直外攀爬方面有较大优势的攀爬蛇形机器人。
该机器采用一种具有万向节功能的P-R(pitch-roll)模块,使得该蛇形机器人能够轻松和灵活地附着于攀爬对象外壁。
根据对目前国内外所设计各种攀爬机器人分析可知,它们均有一个缺陷:
它们在一根杆状物上爬行,迁移性攀爬的功能欠缺,而且任意角度或弯曲的杆状物的适应性也较差。
鉴于攀爬机器人的重要性和应用领域的广泛性,文中基于创新设计理论TRIZ设计了一种新型的攀爬机器人
。
该机器人能够很好地克服适应性差的缺点,而且迁移性攀爬功能较为突出。
1.分析问题
文中所研究的对象是管道等攀爬机器人,根据国内外研究现状,攀爬方式选择范围较广。
针对各种攀爬方式进行对比分析,如表1所示。
表1攀爬机器人攀爬方式的比较
攀爬方式
优点
缺点
轮式移动
速度快,控制简便,灵活性好
接触面积小,越障能力差,适应性差
履带式
接触面积大,承载能力好,速度快,适应能力强
履带磨损严重,复杂性高,机动性差
蛇形攀爬
效率高,灵活性大,工作空间大
多自由度控制难,承载能力低
磁吸式
承载能力大,适应能力强
越障能力差,适应性较差
蠕行式
承载能力大,平稳健山,控制简便,适应能力强
速度慢,复杂性高
问题描述:
现有的攀爬机器人对工作环境要求较高,机器人的迁移性较差,在相邻杆状物之间不能实现迁移性攀爬。
此外,现有的攀爬机器人对弯曲的杆状物或者T型、L型的杆状物的攀爬效果较差。
蠕行式机器人对杆状物的依赖性更大,在分支或者弯曲处,攀爬过程将受阻。
冲突区域:
由分析问题及抽象后的结果,依据TRIZ的冲突分析,可以发现攀爬机器人的冲突发生在机器人的适应性及多用性与装置的复杂性,即改善了机器人的适应性及多用性,装置的复杂程度将增大,建立如表2所示的冲突矩阵。
表2冲突矩阵
冲突特点
迁移性攀爬
结构复杂程度
标准冲突参数描述冲突
适应性及多用性
装置复杂性
相应原理
15动态化:
A:
使一个物体或其环境在操作的每一个阶段自动调整,以达到优化的性能;
B:
把一个物体划分成具有相互关系的元件,元件之间可以改变相对位置;
C:
如果一个物体是刚性的,使之变为可活动的或可改变的。
29气动与液压结构
37热膨胀
28机械系统的替代:
用视觉、听觉、嗅觉系统代替部分机械系统;
用电场、磁场及电磁场完成与物体的相互作用;
C:
将固定场变为移动场,将静态场变为动态场,将随机场变为确定场。
2.攀爬机器人的矛盾解决创新解
根据由冲突矩阵得出的创新原理,拟定攀爬机器人的创新设计方案。
根据创新原理:
15动态化,要使攀爬机器人能够实现迁移性攀爬及越障攀爬,就要使机器人有良好的动态性。
由其中的B:
因此,可以将攀爬机器人分成乒爪和躯干部分,2个手爪和躯干之间通过一些装置联接起来,在联接部位安装翻转电机,通过翻转电机使手爪和躯干之间发生相对运动,实现攀爬机器人翻转运动。
该原理能够很好地解决攀爬机器人的迁移性问题。
此外,根据原理15动态化,还即将机械手分为翻转臂、旋转臂和手爪3个部分。
通过旋转臂的旋转,可以增强机器人的攀爬适应性,在任意角度的杆状物之间可以实现爬行功能。
29气动与液压机构,根据此原理可以解决该间题,但是成本会相应上升。
37热膨胀,经分析与本间题无关,予以剔除。
28机械系统的替代,经分析,该原理下能很好地解决该问题。
综上所述,创新原理15动态化能够很好地解决攀爬机器人迁移性间题根据该原理,文中设计了一种新型的翻转式攀爬机器人,该机器人具有爬行速度高、运动灵活、结构新颖等特点。
3.新型攀爬机器人
应用TRIZ理论的动态化原理设计了新型翻转攀爬机器人,其机械系统主要由躯干、安装在躯干上的2个翻转臂、安装在翻转臂上的旋转臂、安装在旋转臂上的夹紧手爪和控制器组成,图1所示为新型翻转攀爬机器人的结构,组成包括:
该结构的运动由控制器控制5个电机的正反转来完成。
图1新攀爬机器人的整体结构
翻转运动是由翻转电机输出的力矩,经过传动装置传递后输出带动翻转臂和躯干翻转。
图2为攀爬机器人采用翻转式攀爬方式完成的一个完整攀爬运动。
图2新型攀爬机器人的攀爬过程
初始状态时,手爪1、2均夹紧在杆状物上,当机器人向上攀爬时,手爪1仍处于夹紧状态,手爪2松开,翻转电机旋转使得整个机器人
 升级会员
升级会员 