自动控制系统计算机仿真》习题参考答案Word下载.docx
《自动控制系统计算机仿真》习题参考答案Word下载.docx》由会员分享,可在线阅读,更多相关《自动控制系统计算机仿真》习题参考答案Word下载.docx(13页珍藏版)》请在冰豆网上搜索。
方便快捷、成本低廉、工作效率和计算精度都很高。
它所遵循的基本原则是相似性原理。
1-2你认为计算机仿真的发展方向是什么?
向模型更加准确的方向发展,向虚拟现实技术,以及高技术智能化、一体化方向发展。
向更加广阔的时空发展。
1-3计算机数字仿真包括哪些要素?
它们的关系如何?
计算机仿真的三要素是:
系统——研究的对象、模型——系统的抽象、计算机——仿真的工具和手段。
它们的关系是相互依存。
2-1控制算法的步长应该如何选择?
控制算法步长的选择应该恰当。
如果步长太小,就会增加迭代次数,增加计算量;
如果步长太大,计算误差将显著增加,甚至造成计算结果失真。
2-2通常控制系统的建模有哪几种方法?
1)机理建模法;
2)实验建模法;
3)综合建模法。
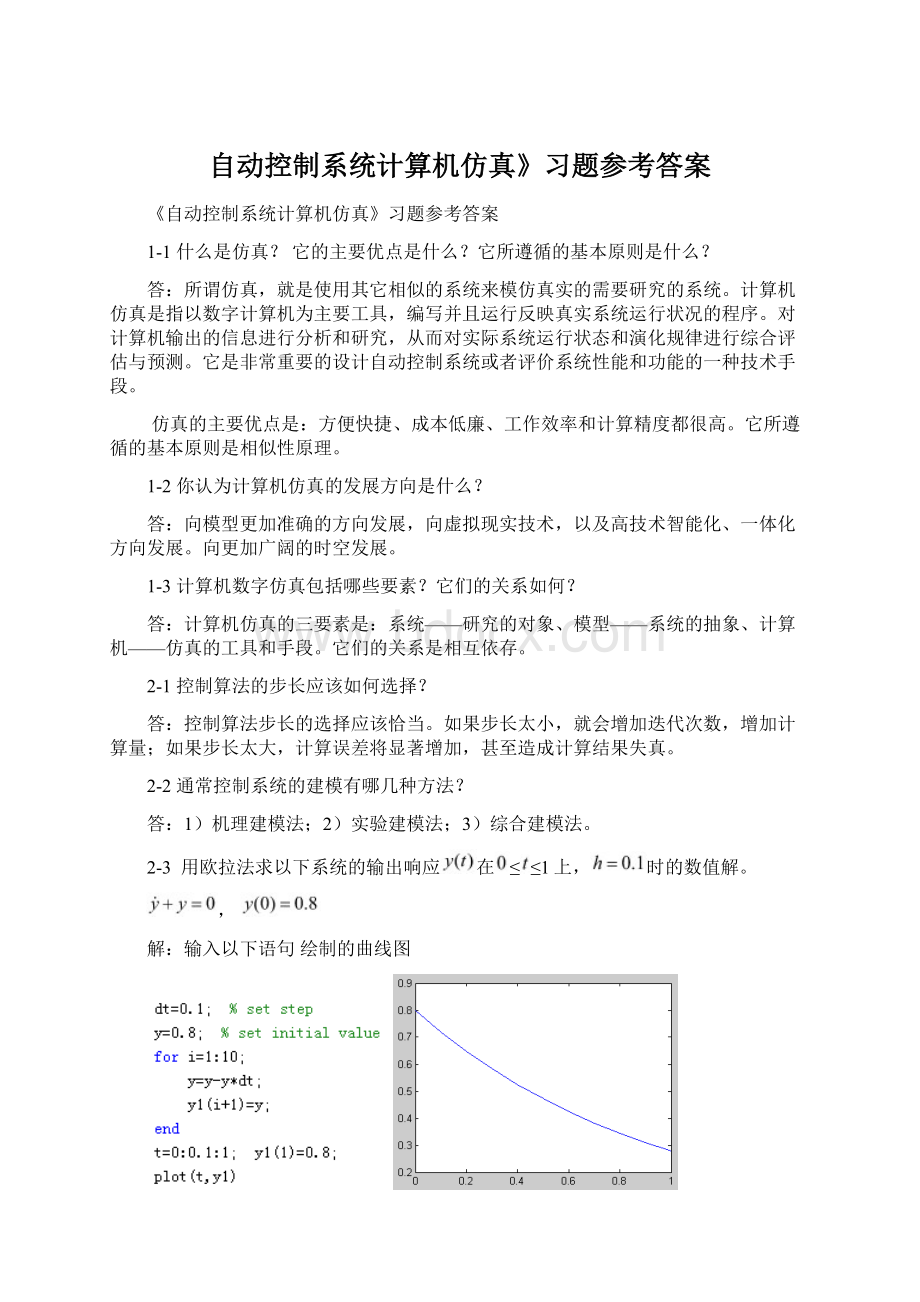
2-3用欧拉法求以下系统的输出响应在≤≤1上,时的数值解。
,
解:
输入以下语句绘制的曲线图
2-4用二阶龙格-库塔法对2-3题求数值解,并且比较两种方法的结果。
经过比较两种方法的结果,发现它们几乎没有什么差别。
3-1编写两个m文件,分别使用for和while循环语句计算。
第1个m文件,第2个m文件运行结果都是
3-2求解以下线性代数方程:
输入语句计算结果
3-3已知矩阵
,
试分别求出A阵和B阵的秩、转置、行列式、逆矩阵以及特征值。
求矩阵的秩、行列式、逆矩阵、特征值的函数分别为:
rank(),det(),inv(),eig()。
求矩阵转置的命令为“.’”。
求出A阵的秩为3、转置为、行列式为、逆矩阵以及特征值;
求出B阵的秩为3、转置为、行列式为、逆矩阵以及特征值。
3-4对于3-3题中的阵和阵,在Command窗口中分别求出、矩阵为中每个元素平方组成的矩阵、矩阵为阵乘以阵、矩阵为阵和阵数组乘积(即:
对应元素分别相乘的积构成的矩阵)。
输入命令,,,,计算结果为
,,,
3-5已知某系统的闭环传递函数如下,试用roots()命令来判断系统的稳定性。
输入命令计算结果如下,系统不稳定
3-6求复数矩阵的转置C1与共轭转置C2。
输入语句
计算结果
4-1某系统的传递函数为
使用MATLAB求出状态空间表达式和零极点模型。
计算机返回
表明该系统的状态空间表达式为
,
该系统的零极点模型为
4-2某单输入单输出系统:
试求该系统状态空间表达式的对角线标准形。
输入语句
计算结果
表明该系统状态空间表达式的对角线标准形为
4-3求出以下系统的传递函数
输入语句计算结果
表明该系统的传递函数为
5-1某一单位负反馈控制系统,其开环传递函数为
它的输入信号为,试使用Simulink构造其仿真模型,并且观察其响应曲线。
在Simulink环境下构造仿真模型如下
阶跃信号(Step)的设置如下响应曲线如下
5-2将5-1题中的闭环控制系统封装成一个子系统。
按住鼠标右键拖拽,方框包括了闭环系统部分,松开右键后,选择“createsubsystem”,建立了系统模型以及子系统模型如下。
6-1分别采用求取特征值的方法和李亚普诺夫第二法判别下面系统的稳定性。
1)求特征值法,输入命令
计算结果为
可见,矩阵A的特征值实部均为负,因此系统稳定。
2)采用李亚普诺夫第二法,输入命令
显然,P阵的各阶主子式均为正定,系统稳定。
6-2某单位负反馈系统的开环控制系统的传递函数为
(1)绘制系统的根轨迹;
(2)当时,绘制系统的Bode图,判断系统的稳定性,并且求出幅值裕度和相角裕度。
(1)输入以下命令,计算机绘制出系统根轨迹
(2)输入命令
计算机绘制系统Bode图,并且计算出幅值裕度和相角裕度,显然闭环系统稳定
7-1已知某单位负反馈控制系统的开环传递函数为
请设计一个串联校正控制器,要求系统性能指标如下:
相角裕度,开环增益
,穿越频率。
(1)根据题目要求,可以选择。
则开环传递函数为
(2)使用命令margin(),计算开环传递函数的稳定裕量,
输入命令:
得出:
,,,系统不稳定,采用滞后-超前校正。
(3)采用滞后-超前校正,建立m文件如下
运行后,计算出
于是,校正后的系统开环传递函数为
得出校正以后的系统:
,,。
基本上达到系统要求
7-2某过程控制系统如图7-32所示,请使用Ziegler-Nichols经验整定公式设计PID控制器,使系统的动态性能最佳。
图7-32习题7-2图
采用Ziegler-Nichols经验公式,,
构造的Simulink仿真模型,以及仿真结果曲线如下。
8-1建立一个笼型异步电机软启动(线电压逐渐加大,直至额定值)的仿真模型。
构造系统的Simulink仿真模型如下图所示
其中不妨选择异步电机设置为
使用3个控制电压源,其中一个设置如下
A,B,C三相正弦波信号源的相位分别设置为,和0。
仿真运行结果为
8-2如何在电力电路中获得一个的纯电阻模块?
1)从SimPowerSystems/Elements模块集中拖拽出一个“ParallelRLCBranch”,并且设置R为2、L为inf、C为0。
或:
2)从SimPowerSystems/Elements模块集中拖拽出一个“SeriesRLCBranch”,并且设置R为2、L为0、C为inf。
8-3如何在电力电路中获得一个的纯电感模块?
1)从SimPowerSystems/Elements模块集中拖拽出一个“ParallelRLCBranch”,并且设置R为inf、L为0.05、C为0。
2)从SimPowerSystems/Elements模块集中拖拽出一个“SeriesRLCBranch”,并且设置R为0、L为0.05、C为inf。
(本资料素材和资料部分来自网络,仅供参考。
请预览后才下载,期待您的好评与关注!
)
 升级会员
升级会员 