力士乐驱动器使用说明Word格式文档下载.docx
《力士乐驱动器使用说明Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《力士乐驱动器使用说明Word格式文档下载.docx(26页珍藏版)》请在冰豆网上搜索。
⏹完成窗口如下:
⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
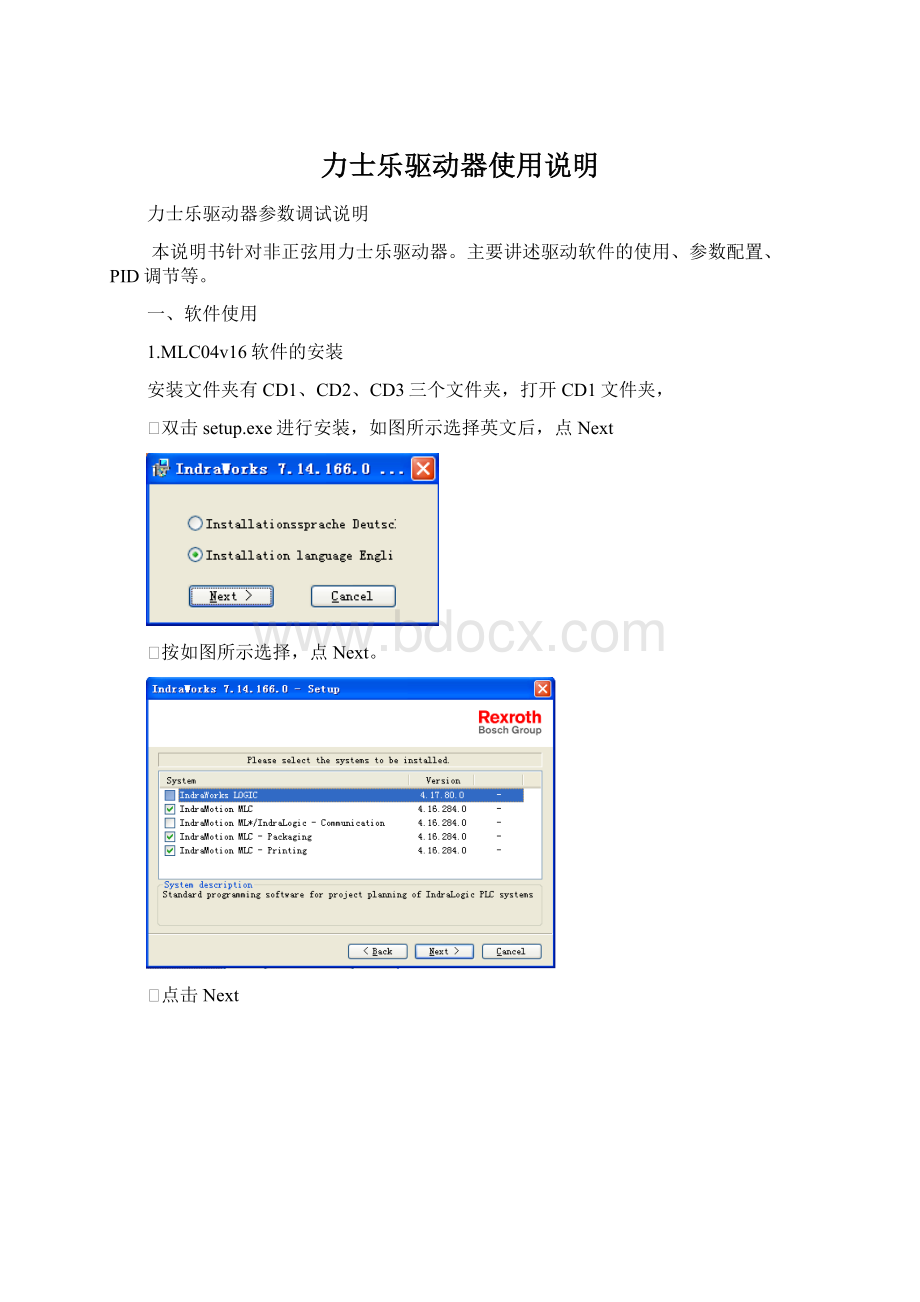
2.软件操作
⏹打开软件
●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->
程序->
Rexroth->
IndraWorks7.14.166.0->
Engineering.来打开。
⏹软件使用
●工程的使用
如下图
点击Createanemptyproject为建立一个新工程。
点击Openproject打开一个现有工程。
点击Scanfordevices扫描串口总线上的设备
点击Restoreproject把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:
新建工程;
Open:
打开工程。
●与伺服启动器联机
打开工程后
变为
点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击ScanforDevice后弹出如下窗口
点Next后自动寻找设备。
未找到设备则弹出下面创库
●示波器功能
点Diagnostics下拉菜单,点击Oscilloscope
下图所示为示波器窗口。
采集时间配置:
点击右上角的Configure后弹出,时间配置。
其中Memorydepth,采集的点数
Timeperiod:
每10ms采集一个点
Recordingtime:
前面两项相乘得出的总采样时间。
触发方式配置:
点击上图右下角的Configure后弹出如下窗口:
Manualtrigger为手动触发。
PreTrigger为记录触发前数据长度的百分数,触发后数据长度的百分数。
自动触发:
点击Select选择触发源
选择后如下图所示
==当实际值Actualvalue=TriggerValue时触发
Bothedges当Actualvalue>
TriggerValue或Actualvalue<
TriggerValue时产生的上升沿和下降沿触发。
Edge
下降沿触发
上升沿触发
采集配置
点击Signals后弹出如下窗口,选择要采集的信号
表示示波器软件连接伺服驱动器还是断开连接的操作
手动触发数据采集时先点Start再点Trigger。
●
3.
二、参数配置
1.DP配置
⏹Mastercommunicationaddress:
2从站地址。
⏹Baudrate:
波特率由主站决定
⏹Cycletime:
2000us通讯周期
⏹Watchdogtime:
12ms通讯看门狗时间
⏹Lengthofparameterchannel0byte参数通道长度
⏹Lengthofcyclicreal-timechannel20byte实时数据通道(驱动器向PLC一次可以写20个字节)
⏹Lengthofcycliccommandchannel10byte命令数据通道(PLC向驱动器一次可写10个字节)
2.轴设定
⏹Scalingtype:
选择linear直线轴。
⏹Positiondataformat:
absolute绝对位置
⏹Maxinumtravelrangel:
360mm最大行程
⏹Feedconstantk:
16mm/rev导程
⏹Inputrevolutionsofloadgearn1:
1输入比例
⏹Outputrevolutionsofloadgearn2:
1输出比例
3.设定原点
⏹Clearpositionstatus:
清除当前位置
⏹Setabsolutemeasuring:
设定位置
4.主轴监视
⏹Velocitycommandvalue60RPM。
监视当前设定频率
⏹TargetPosition:
270deg监视当前电机所处正弦的相位
⏹Masteraxisformatconverter:
P-0-0758:
Virtualmasteraxis,actualpositionvalue。
主轴模式为虚拟主轴,实际位置。
5.MLD配置
⏹PLChaspermanentcontroloverthedrive:
驱动器具备PLC功能(可编程逻辑控制)。
⏹MotionerrorsatFBdonottriggerany(axis)errors:
在FB发生的motion错误不触发轴错误
⏹Axisdatastructuresupported支持程序调用轴数据
6.电阻设置
⏹Nom,brakingresistance160ohm制动电阻160欧姆
⏹Brakingresistorcontin50W制动电阻功率50W
⏹Max,regenerpowertobeabsorbed:
1KWS
7.参数保存
修改完参数后必须按如图操作,否则不能保存参数。
8.下载凸轮表5,6,7,8
凸轮表5,6,7,8不能直接下载,需用如下方法下载
⏹首先按如图所示保存为外部文件
⏹其次再按图所示导入凸轮表
⏹再上传凸轮表会如下图:
9.IO配置
⏹1,2脚位电源输入,在程序部可读P-0-0861的第0位。
⏹3,4,5,6,7为数字量输入,分别为P-0-1394的第0,1,2,3,4位。
并可通过IB8访问,同样是0,1,2,3,4位。
⏹1,2为模拟量输出。
⏹4,5为模拟量输入。
⏹6,7,8脚位数字量输入
⏹9为数字量输出
⏹如图所示配置,为把实际电流通过模拟量送出。
对应关系为0~5V对应-70A~70A。
每伏对应28A。
⏹如图所示配置为采集0~10V信号,并映射到IB10,可用程序访问IB10。
10.固件版本更新
⏹首先打开FirmWaremanagement
⏹选择本地FirmWare后显示在左侧,右侧为当前驱动器的的FirmWare
⏹点击DownLoad后下载新固件。
三.PID调节
⏹位置环
位置环增益:
提高此参数可以提高位置整定的速度。
位置环前馈:
提高此参数可补偿位置环的变化。
⏹速度环
速度环增益KP:
提高此参数值,提高速度环强度,提高调节速度。
速度环积分时间:
提高此参数值,可较少速度波动,但是会降低响应时间。
 升级会员
升级会员 