定螺距螺旋桨攻角算法及其3D图绘制Word文件下载.docx
《定螺距螺旋桨攻角算法及其3D图绘制Word文件下载.docx》由会员分享,可在线阅读,更多相关《定螺距螺旋桨攻角算法及其3D图绘制Word文件下载.docx(10页珍藏版)》请在冰豆网上搜索。
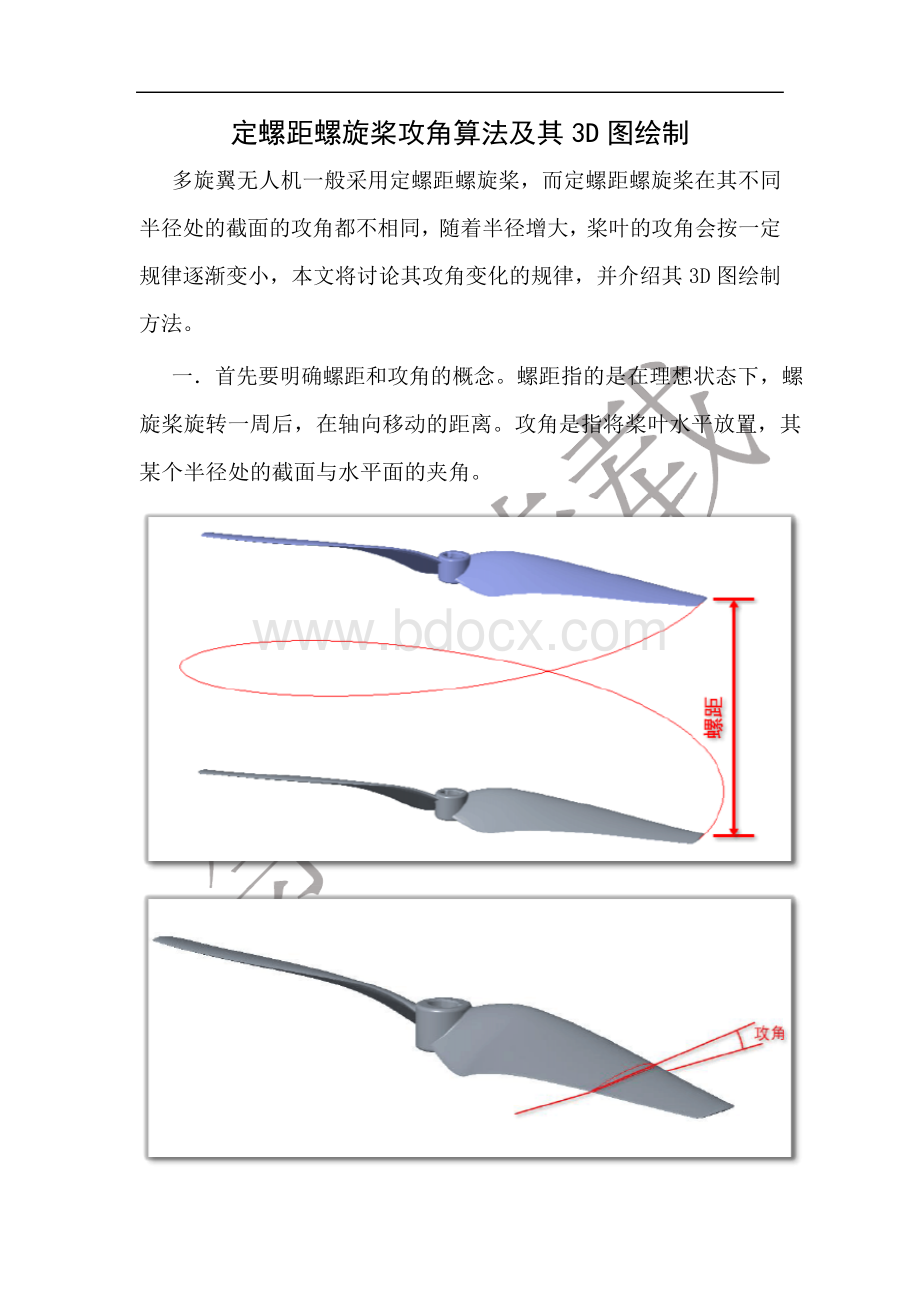
攻角是指将桨叶水平放置,其某个半径处的截面与水平面的夹角。
二.当螺旋桨在旋转时,桨叶上的每一个点的运动轨迹都是一条螺旋线。
桨叶在旋转一周后,桨叶上的每一个点上升的距离都一样,越靠近旋转轴的点,运动轨迹线就越陡峭,攻角也就越大。
反之,离旋转轴越远的点,运动轨迹就越平缓,攻角就越小。
将一条螺旋线所在的圆柱面展平,则会得到一条斜直线,将此圆柱面的周长当做底边,螺距当做高,即可得到一个直角三角形,∠ɑ就是此处的攻角。
螺旋线的半径越大,则攻角越小。
由反正切函数
∠ɑ=atan(a/b) [a 为对边,b为邻边]
代入本例,得出:
∠ɑ=atan(p/(2*π*r)) [p 为螺距,r为半径]
三.在PROE中,我们可以利用上面的公式,来确定螺旋桨在任意半径上的攻角,扫描出一个角度渐变的曲面,并在此曲面的基础上,按照选定的翼形,扫描出最终桨叶。
下面,我们用一个实例来介绍具体操作方法。
1.首先在TOP平面上拉伸一个圆柱体,当做螺旋桨的旋转轴。
并沿着x轴的方向绘制一条直线a,直线长度等于桨叶的半径。
2.在TOP平面绘制两条曲线b和c,即桨叶的俯视轮廓外观线。
3.将作为迎风面的一侧的曲线b做为截面,在TOP平面上拉伸出一个曲面。
4.在此曲面上投影一条曲线d,即桨叶主视角上轮廓线。
5.以曲线a为主轨迹做可变截面扫描曲面,以曲线d为辅助轨迹,参数如图。
6.截面为一条直线,使曲线d的端点位于直线的中点,标注直线与
TOP平面的夹角(sd7),如下图,并在关系中加入关系式。
在PROE的关系式中,反正切函数格式为
∠ɑ=atan2(a,b)[a为对边,b为邻边]
在本例中,可得:
∠ɑ=atan2(p,(2*pi*r))[p为螺距,r为半径]
设螺距p为4.5英寸,即为114.3mm;
螺旋桨半径为127mm;
trajpar
为PROE内置函数,其值从0到1匀速变化。
在本次扫描过程中,半径从0到127匀速变化,并由此计算出其旋转周长的变化,可表示为
(2*pi*127*trajpar)。
将数值代入关系式中:
sd7=atan2(114.3,(2*pi*127*trajpar))
点击确定后,图中sd7的值即变为90︒,表示半径为0时,攻角为
90︒。
扫描得出的曲面,即为桨叶攻角随半径变化而变化的曲面。
7,最后在此曲面上投影下轮廓线,以上下轮廓线为轨迹,绘制合适的翼形作为截面,即可扫描出桨叶主体。
桨叶靠近旋转轴的一端约
30%左右效率很低,将其切除,与旋转轴接顺即可。
 升级会员
升级会员 