机器人静力学和雅克比实验.docx
《机器人静力学和雅克比实验.docx》由会员分享,可在线阅读,更多相关《机器人静力学和雅克比实验.docx(13页珍藏版)》请在冰豆网上搜索。
机器人静力学和雅克比实验
实验〔4〕机器人机器人静力学和雅克比实验
一、实验目的:
1)理解机器人角速度的相关概念;
2)对构建的机器人进行速度分析;
3)了解和熟悉机器人雅克比矩阵的含义,
4)能够使用simulink构建机器人仿真模型。
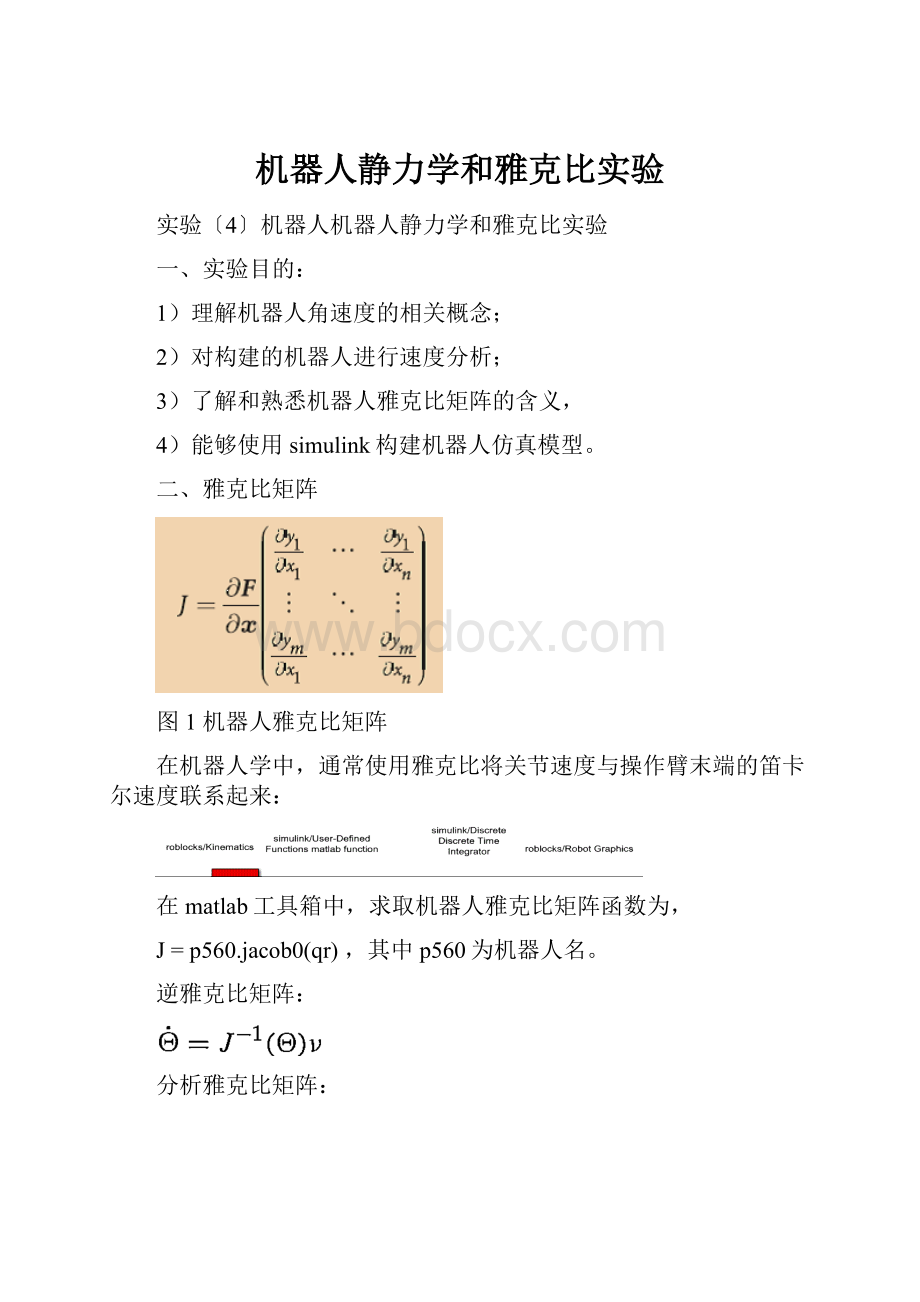
二、雅克比矩阵
图1机器人雅克比矩阵
在机器人学中,通常使用雅克比将关节速度与操作臂末端的笛卡尔速度联系起来:
在matlab工具箱中,求取机器人雅克比矩阵函数为,
J=p560.jacob0(qr),其中p560为机器人名。
逆雅克比矩阵:
分析雅克比矩阵:
其中,
在matlab工具相中对应函数为,
推导可得,
变换为,
简化模型化为,
在matlab工具箱中,对应的RPY的雅克比速度映射函数,
该函数为从RPY角速度到角速度的雅克比变换函数。
即上式中的
。
在matlab工具箱中,对应的ZYZ欧拉角的雅克比速度映射函数,
>>eul2jac(0.1,0.2,0.3)
ans=
0
0
对应书中p113页中公式〔5-41和5-42〕。
综上可得到解析型雅克比,
三、基于simulink的机器人仿真模型建立,要求机器人末端以一定的速度运行。
步骤如下:
1〕新建simulink模型文件,保存为testrobotJ;
2〕在命令窗口中键入roblocks,调出机器人library库;
3〕翻开simulink库;
4〕在新建的simulink模型文件中,从机器人库和simulink库中查找相应的函数模型按给定例子搭建;
图仿真系统中各模块对应的simulink库名
上面仿真中的模块所在的库:
图机器人库
图关节伺服单元〔jointservo〕和常量所在库
图输出〔out〕和matlab自定义函数库〔matlabfunction〕
图矩阵多通道库
各模块的参数设置如下列图:
5〕命令窗口中运行mdl_puma560;
6〕运行建立的模型testrobotJ;
7〕查看仿真结果。
图仿真结果
四、实验内容
〔1〕用simulink建立如下列图所示的机器人仿真模型,机器人模型为puma560,可以直接使用机器人库提供的puma机器人模型,并进行观测分析,并且描述仿真模型的过程和功能。
Circle模型
Circle模型先如上图构建,然后选中Circle中所有的模块,点击右键出现菜单,选择Creatsubsystemfromselection.
然后点击上图中subsystem右键,点击mask->CreatMask…
增加如上edit参数:
radius和preq。
点击应用就可。
然后在subsystemxy模块上双击。
修改参数如下;
Circlecentre参数和XYGraph参数设置
Workspace参数设置举例
〔2〕书中matlab习题实现。
P129-P130.选做。
 升级会员
升级会员 